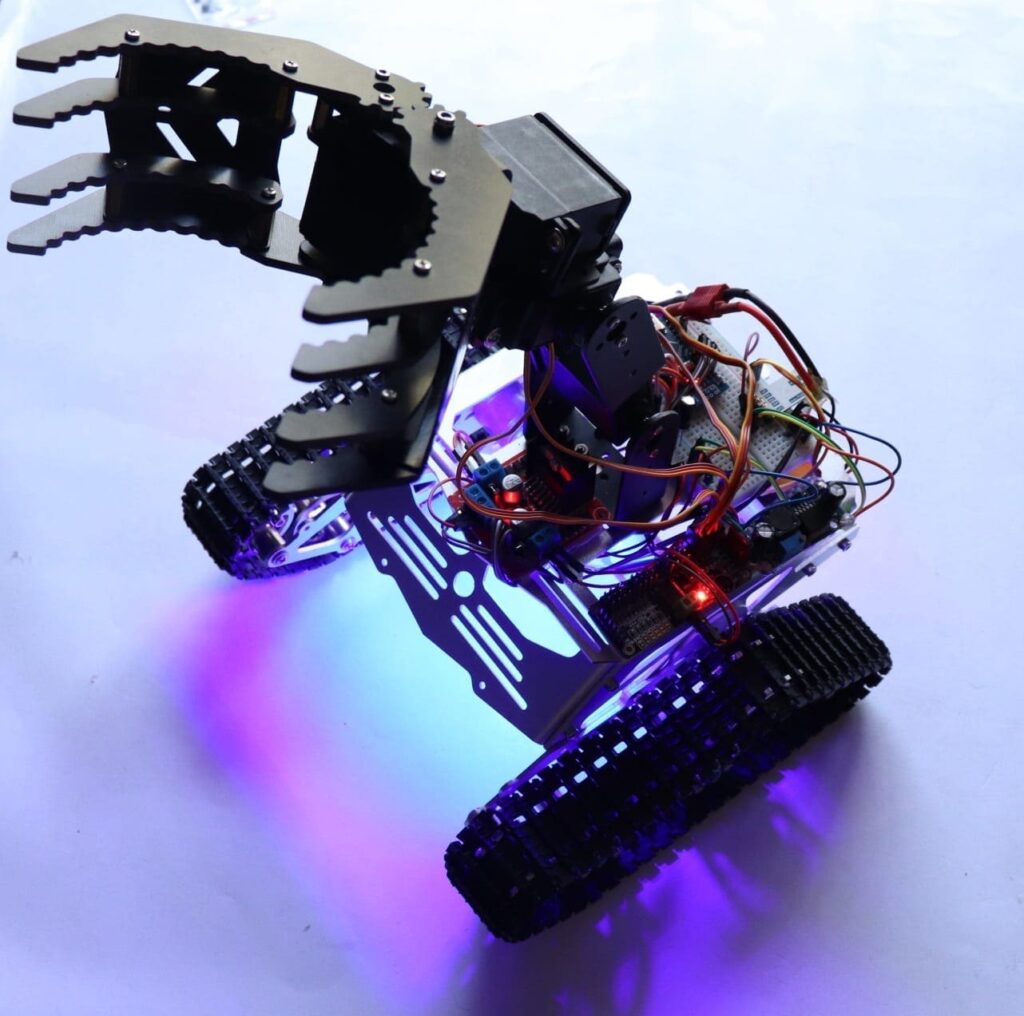
Toivottavasti olet käynyt läpi johdanto osa Spinel Crux L2 – Arduino Pick and Place robotti robotti käsi. Näyttää siistiltä hehkuvien valojen alla, eikö? Mikset rakentaisi sellaista itsellesi? Täällä opimme rakentamaan robotin ja yhdistämään robottikäden sen päälle ja rakentamaan oman DIY pick and place-robottimme.
annamme sinulle suunnittelun, koodin, piirikaaviot ja linkit, joilla voit ostaa oman robottikäsivarren, robottipakkauksen, Alustan ja tässä projektissa käytetyt anturimoduulit.
yritä tehdä sellainen itse ja jos olet jumissa projektissa, voit aina ottaa meihin yhteyttä tai esittää kysymyksesi kommenttikentässä tai WhatsApp-ryhmässämme. Joten pitemmittä puheitta, anna aloittaa projektin!
Arduino Pick and Place Robot Video Tutorial
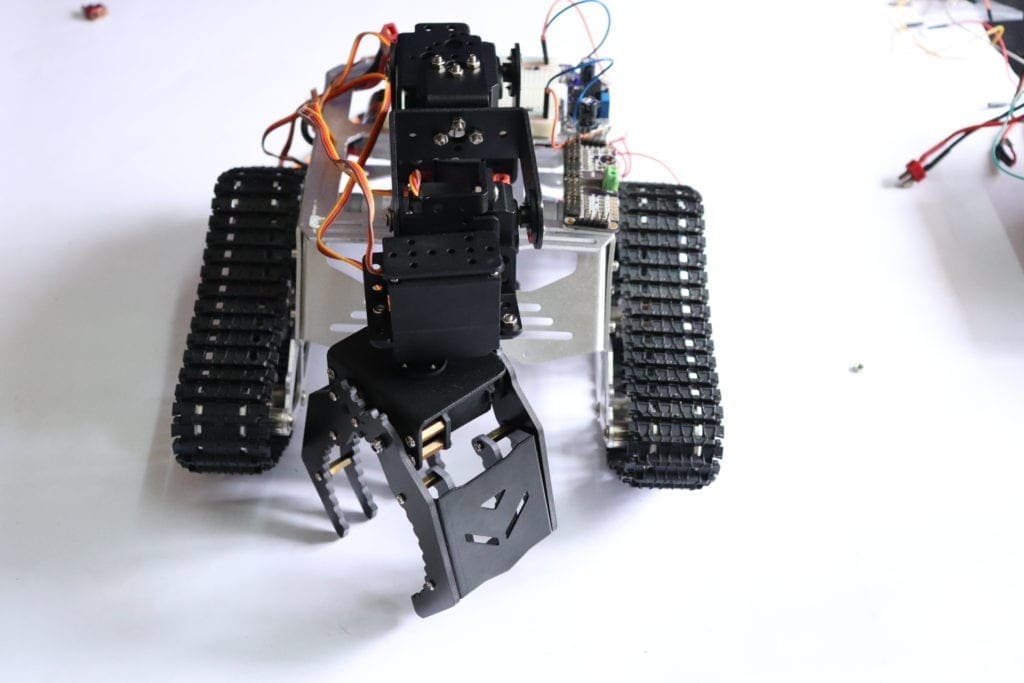
ensimmäinen otos tekemästämme Pick and Place-robotista.
kerron ensin hieman komponenteista, joita käytin tämän pick and place-robotin rakentamiseen.
Arduino Pick and Place Robot Components Needed
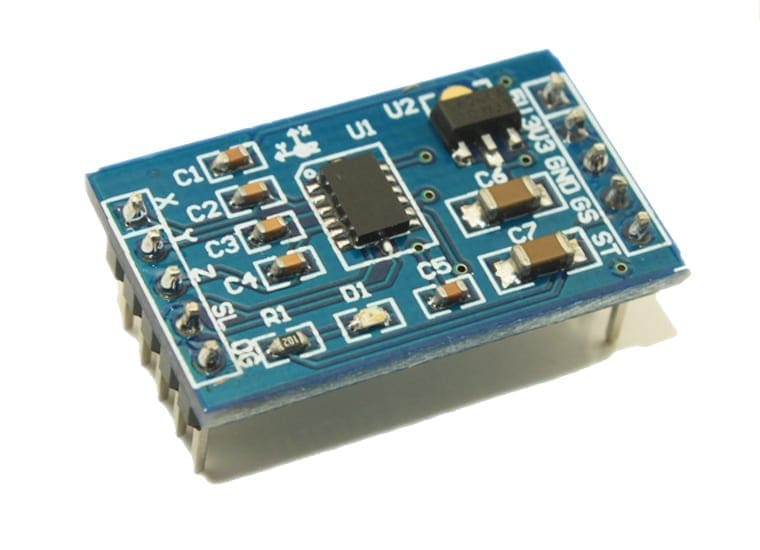
kiihtyvyysanturi on anturi, jonka avulla voidaan aistia painovoiman aiheuttama kiihtyvyys eri akseleilla, jotka vaikuttavat kappaleeseen. Käyttämällä tätä voimme helposti laskea kallistus kohteen suhteessa maahan. Ajamme Spinel Crux käyttäen X ja Y kallistus analogisia arvoja.
tässä käytän MMA7361-kiihtyvyysmittaria ohjaamaan Eleohjatun robottimme suuntaa; voit käyttää mitä tahansa kiihtyvyysmittaria, joka antaa analogiset arvot X-ja Y-suunnassa. Syy, miksi käytän tätä kiihtyvyysanturi on, voimme tarjota 5 volttia sekä 3.3 volttia VCC tähän kiihtyvyysanturi. koska käytän Arduino MKR1000, voin kytkeä 3.3 voltin suoraan Arduino. Se on myös pieni erittäin kevyt ja voidaan helposti liittää Arduino ja Vadelma Pi ilman suurempia komplikaatioita. jos haluat, voit ostaa tämän kiihtyvyysmittarin edulliseen hintaan banggood.com.
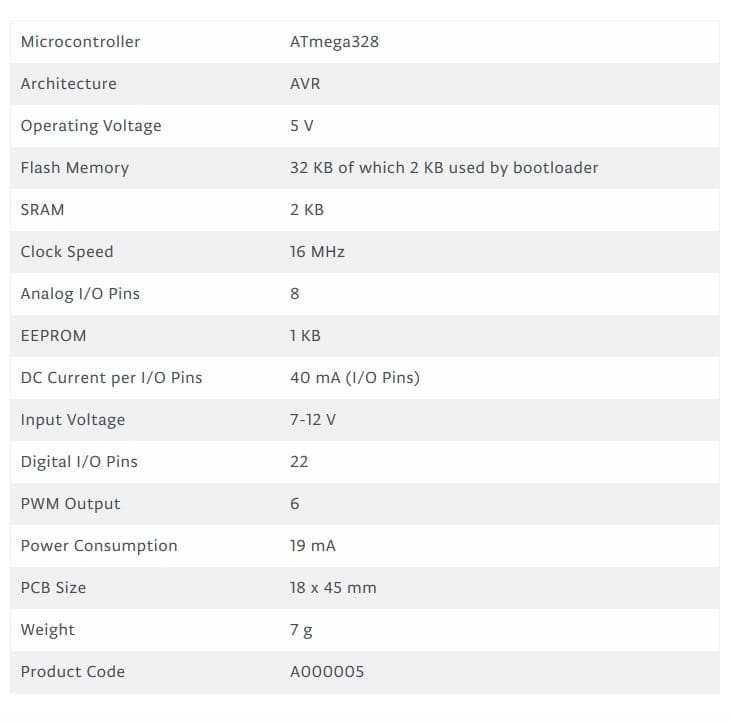
Arduino Nano
tässä projektissa meidän on käytettävä kahta micorcontrolleria – yhtä ohjainta varten, joka kerää kaikki anturin tiedot ja lähettää ne langattomaan moduuliin, ja toista robottia varten, joka kerää dataa vastaanottimen moduulista, käsittelee niitä ja ohjaa robottikäsivartta ja pick and place-robottia. Arduino Nano on hyvin pieni ja sen voi helposti asentaa leipälaudan päälle. Tämä voidaan helposti ohjelmoida PC: llä USB: n kautta käyttäen Arduino IDE
tätä levyä voidaan käyttää Mini USB-portilla. Kautta pin 30, voimme toimittaa sääntelemätön jännitelähde 6-20v tai kautta pin 27, voimme tarjota säännelty virtalähde 5V. tehonvalinta tehdään automaattisesti Nano aluksella.
Opi Arduino helppo tapa
Oletko uusi Arduino? Haluatko parantaa taitojasi Arduino ohjelmointi? Olet oikeassa paikassa. Meillä on täydellinen aloittelija-tason opetusohjelma Arduino joka kattaa kaiken tyhjästä. Tässä ilmainen Arduino opetusohjelma aloittelijoille opas, otamme katsomaan Johdatus Arduino alustan, aloittaminen Arduino IDE, erilaisia Arduino levyt, ja paljon DIY hankkeita käyttäen Arduino. Katsokaa!
aloitetaan oppiminen Arduino
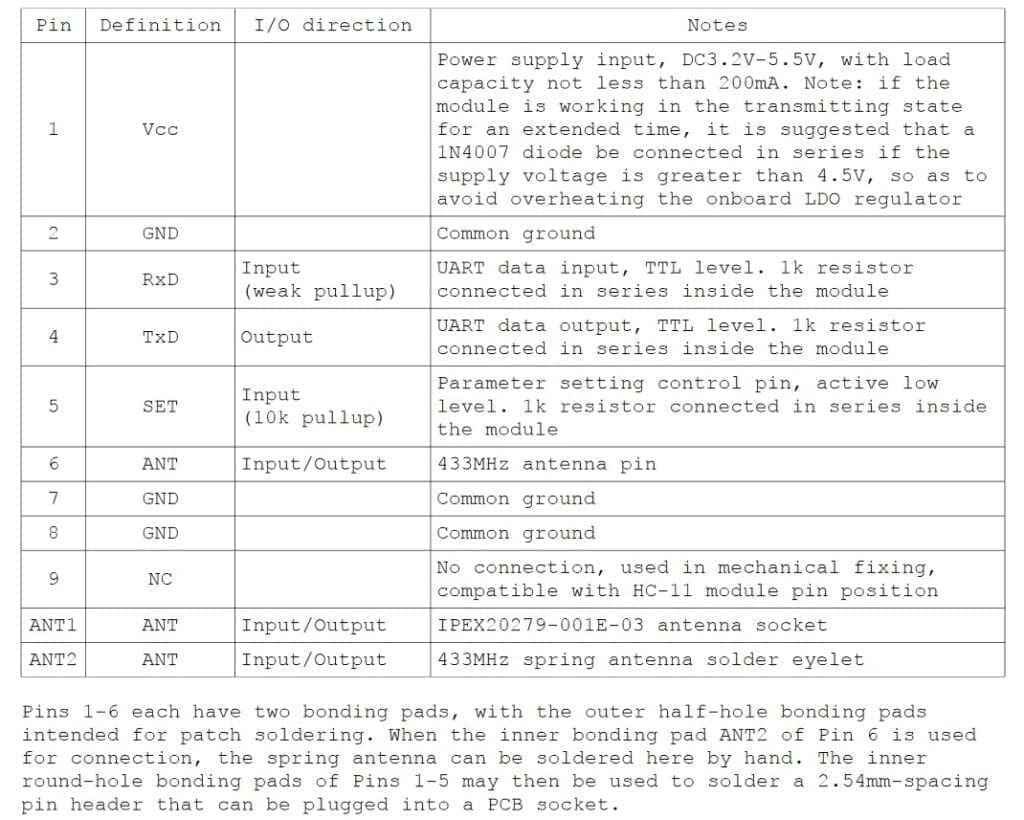
HC12
HC 12 on todella halpa pitkän kantaman langaton moduuli, jota voidaan käyttää langattomaan sarjaviestintään pitkällä, jopa 1,7 KM: n matkalla. Moduuli on todella kompakti kevyt ja leipälauta-ystävällinen, mikä tekee tästä parhaan langattoman ohjaimen projektimme.

Pinout
Hc12-yhteyden testaus
#include <SoftwareSerial.h>SoftwareSerial HC12(10, 11); // HC-12 TX Pin, HC-12 RX Pinvoid setup() {Serial.begin(9600); // Serial port to computerHC12.begin(9600); // Serial port to HC12}void loop() {while (HC12.available()) { // If HC-12 has dataSerial.write(HC12.read()); // Send the data to Serial monitor}while (Serial.available()) { // If Serial monitor has dataHC12.write(Serial.read()); // Send that data to HC-12}}
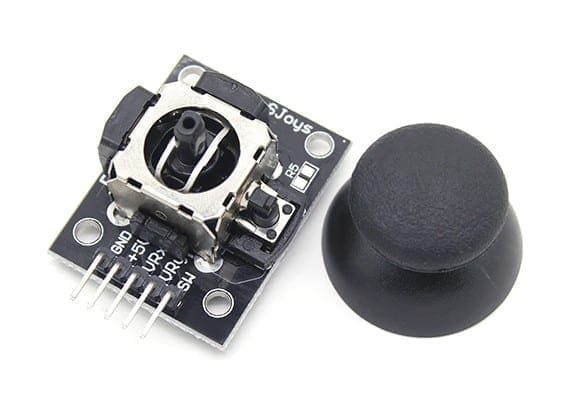
Joystick
tämä on yleisimmin käytetty robottiohjain, jonka mukana tulee erilaisia Robot DIY robot kit/robot arm kit, joka on rakennettu toimimaan arduino. Muotoilu on melko yksinkertainen ja erittäin helppokäyttöinen. Se käyttää kahta potentiometriä x-akselin ja y-akselin liikkeen laskemiseen ja kytkintä napinpainalluksen aistimiseen.
tämä voidaan helposti liittää Arduinon analogisiin pinneihin ja lukea analogisia arvoja suoraan.
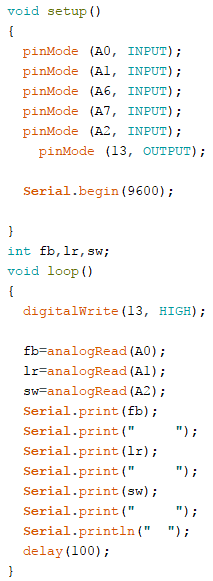
Lataa
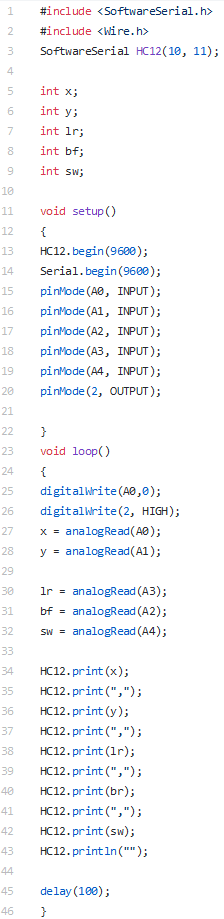
ennen kuin lataat pääkoodin, varmista, että ohjaussauvasi toimii tämän koodin avulla. Lataa koodi yllä olevasta linkistä. Tässä esimerkissä, mitä teemme on yksinkertaisesti kerätä tietoja analogiset lähdöt Joystick käyttäen analogisia nastat (A0, A1, A2) Arduino. Nämä arvot tallennetaan muuttujiin ja tulostetaan myöhemmin sarjamonitorille.
jaamme tämän postauksen kahteen osaan
1-Pick and Place Robot Remote Controller
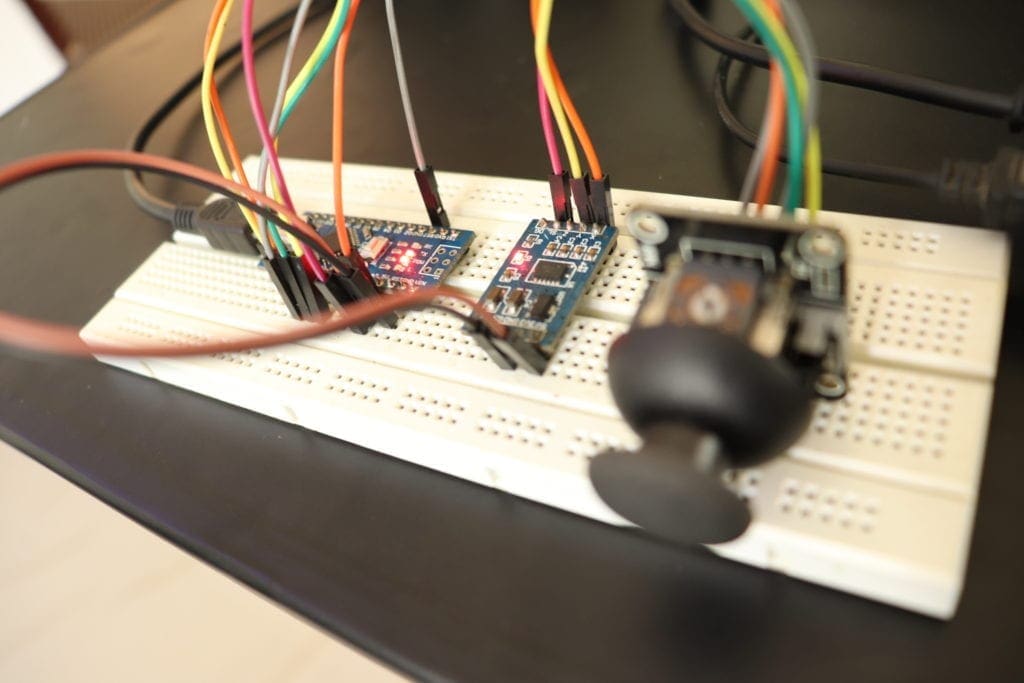
Lähetin koostuu leipälaudasta, johon kiinnitämme kaikki anturit ja komponentit saadaksemme datan, jota käytetään pick and place robotin ja robottikäden ajamiseen. Tämä sisältää kiihtyvyysmittarin, joystickin ja HC12-moduulin.
käytämme kiihtyvyysmittaria robottikäden ohjaamiseen ja joystickiä robotin ohjaamiseen. Toistaiseksi käytämme joystick-painiketta robottikäden sulkemiseen. Näiden antureiden tiedot välitetään langattomasti DIY-robotille HC12-moduulin avulla.
2-Pick and Place-robotti
tässä, kerron teille, miten tehdä robottikäsivarsi, rakentaa robotti ja asentaa käsivarsi robotin päälle. Opit myös ohjelmoimaan Arduinon lukemaan langattoman viestintämoduulin – HC12-datan, käsittelemään sitä ja miten robottikäsivartta hallitaan Arduinon avulla robotin kanssa.
DIY-robotiikan oppiminen ei ole koskaan ollut näin helppoa!
DIY-robotiikka on hauska ja helppo asia, jonka voit oppia muutamassa minuutissa, jos sinulla on kunnollinen opas. Haluatko oppia robotiikkaa, mutta et tiedä mistä aloittaa? Sitten tämä on sinulle. Täällä, autamme sinua pääsemään alkuun DIY Robotics helppo seurata, 100% ilmainen, askel-askeleelta ohjeet alkaen robotiikan perusteet, osia Robot, ja sitten aloitamme täydellinen askel-askeleelta tutorials. Täältä löydät myös mahtava kokoelma Robotics Project Tutorials aloittelijatasolta advanced voit aloittaa DIY Robotics.
Aloita robotiikan oppiminen
Osa 1-kauko-ohjain
kuten aiemmin mainittiin, tämä DIY-robotti on kauko-ohjattava robotti. Ohjainosassa on siis leipälauta, ohjaussauva – jolla ohjataan robotin liikettä ja robotin nyrkin sulkemista ja avaamista, kiihtyvyysanturi – jolla robottikäsivartta liikutetaan, sekä langaton moduuli, jolla nämä tiedot lähetetään robotille.
yhteydet
liitä kaikki komponentit alla esitetyllä tavalla. Tulemme virran Arduino kanssa 5V power bank ja käyttää 5 V Vout arduino virran kaikki muut moduulit.
kauko-ohjain PCB
edellisessä videossani Näytin, miten teet tämän langattoman kauko-ohjaimen RC-Robotillesi käyttäen leipälaudan kiihtyvyysmittaria, painikkeita ja langatonta HC12-moduulia. Jos et ole nähnyt sitä vielä, katso alla oleva video ensin. Käytämme kauko-ohjainta robotin ohjaamiseen.
käytännössä tämä kauko-ohjain lukee analogisia ja digitaalisia tietoja antureista, kuten kiihtyvyysanturin painikkeiden joystickistä, ja tallentaa ne erillisiin muuttujiin. Nämä muuttujat yhdistetään yhdeksi pitkäksi merkkijonoksi ja tämä merkkijono lähetetään ROBOTILLEMME langattoman HC12-moduulin avulla.
Piirustuskaaviot ja piirilevysuunnittelu käyttäen Altium
joten käytin Altium Designeria piirilevyn piirtämiseen ja piirilevyn suunnitteluun. Se on tehokas työkalu, jota voidaan käyttää suunnitella ja luoda omia PCB projektiin sekä monimutkaisia ja moninpeli PCB teollisuuskäyttöön. Tässä on linkki Altiumin kokeiluversioon. Tarkista asia.
piiri
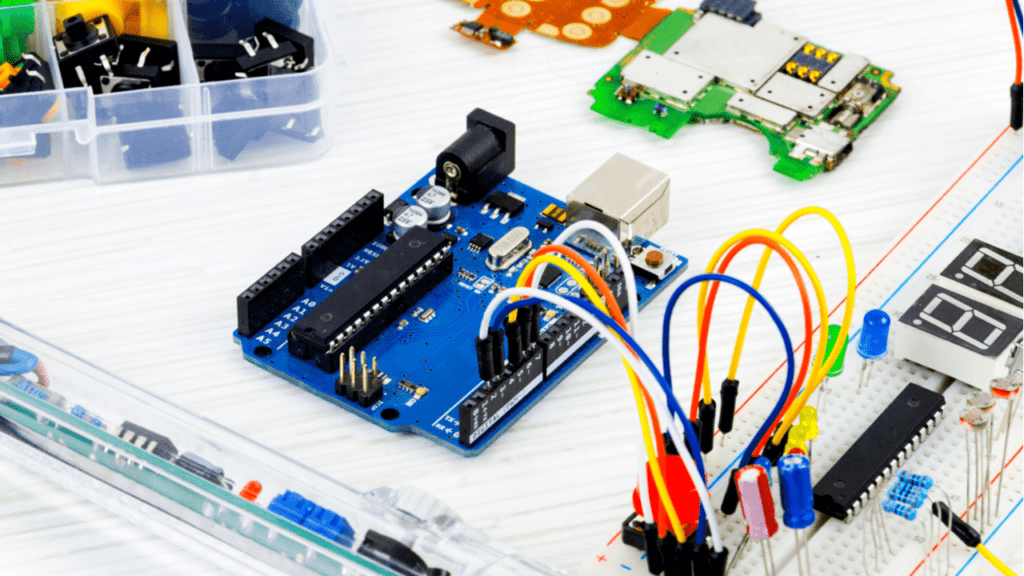
tein piirin, joka sisälsi kaikki osat: joystick, kiihtyvyysanturi, Arduino nano ja hc12 moduuli kytketty GPIO tappi arduino ja koottu leipälauta.

se toimi moitteettomasti, mutta ongelma oli, että koko lauta näytti todella sotkuiselta, kun kaikki kirppujohdot menivät sinne tänne. Joten päätin mennä PCB.
PCB-versioon lisäsin 4 kytkintä, joita tulen käyttämään seuraavassa projektissa.
lisäsin myös 7805 säädin, joka auttaa minua antamaan tulojännite välillä 7V ja 35V niin, että voin käyttää 5V USB virtalähde, 9V akku tai jopa 12 V Lipo akku ilman mitään ongelmia. Lisäsin myös joitakin merkkivaloja, jotka kertovat minulle, jos jokin lakkasi toimimasta. Löydät piirin alla olevasta linkistä.
PCB Layout
Altium PCB suunnittelija voidaan myös tehdä PCB layout. Tämä on pohjapiirros, jonka tein piirillä. Kuten näette, tämä on kaksikerroksinen PCB, mikä tarkoittaa reititys on siellä molemmin puolin – yläpuoli sekä alaosa.

vasemmalla puolella lauta jätin tyhjää tilaa pitää minun paristot nyt minulla on Gerber tiedosto kanssani. Minun piti vain tilata piirilevy.
kun sain kaikki komponentit, juotin ne kaikki yhteen ja tämä on lopullinen PIIRILEVYNI. Kaikki komponentit ovat nyt yhteydessä tauluun.
int x;int y;int lr;int bf;int sw;void setup(){ Serial.begin(9600);pinMode(A0, INPUT);pinMode(A1, INPUT);pinMode(A2, INPUT);pinMode(A3, INPUT);pinMode(A4, INPUT);pinMode(2, OUTPUT);}void loop(){digitalWrite(A0,0);digitalWrite(2, HIGH);x = analogRead(A0);y = analogRead(A1);lr = analogRead(A2);bf = analogRead(A3);sw = analogRead(A4);Serial.print("Accelerometer");Serial.print("X = ");Serial.println(x);Serial.print("Y = ");Serial.println(y);Serial.println("");Serial.print("Joy Stick");Serial.println("");Serial.print("Left/Right = ");Serial.println(lr);Serial.print("Back/Forward = ");Serial.println(bf);Serial.print("Switch = ");Serial.println(sw);Serial.println("");Serial.println("");delay(250);}
kun tämä koodi on ladattu, käynnistä sarjamonitori ja tarkista, että kaikki nämä arvot on esitetty oikein.
voit ladata oikean koodin alla.
koodi
lataa alla oleva koodi käyttämällä alla olevaa latauslinkkiä ja lataa se ohjaimeesi.
Download
Part 2-robotti
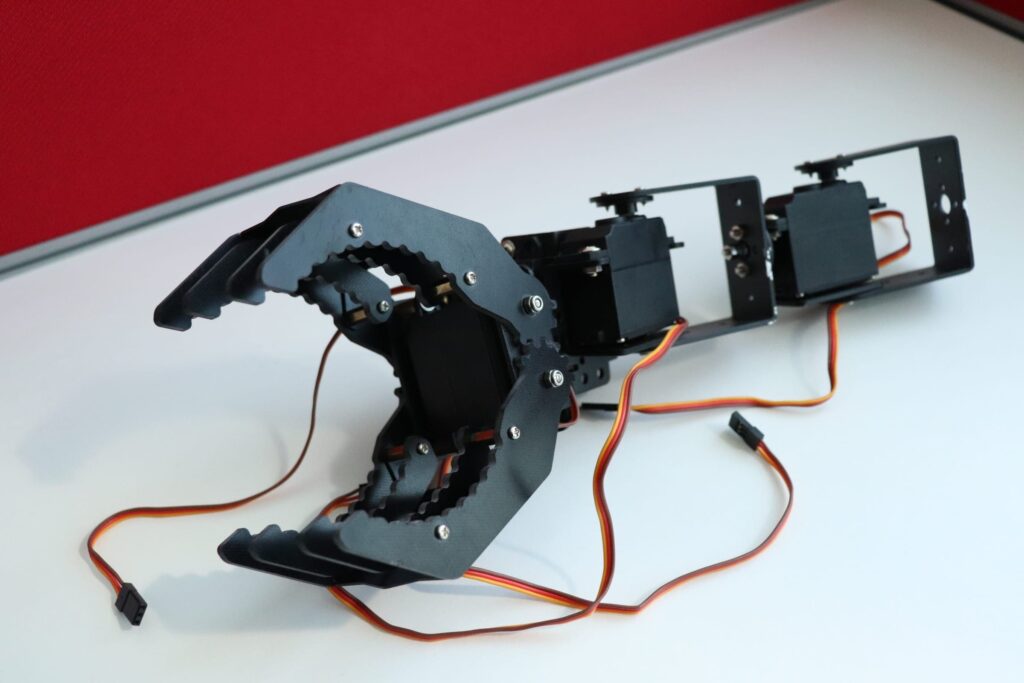
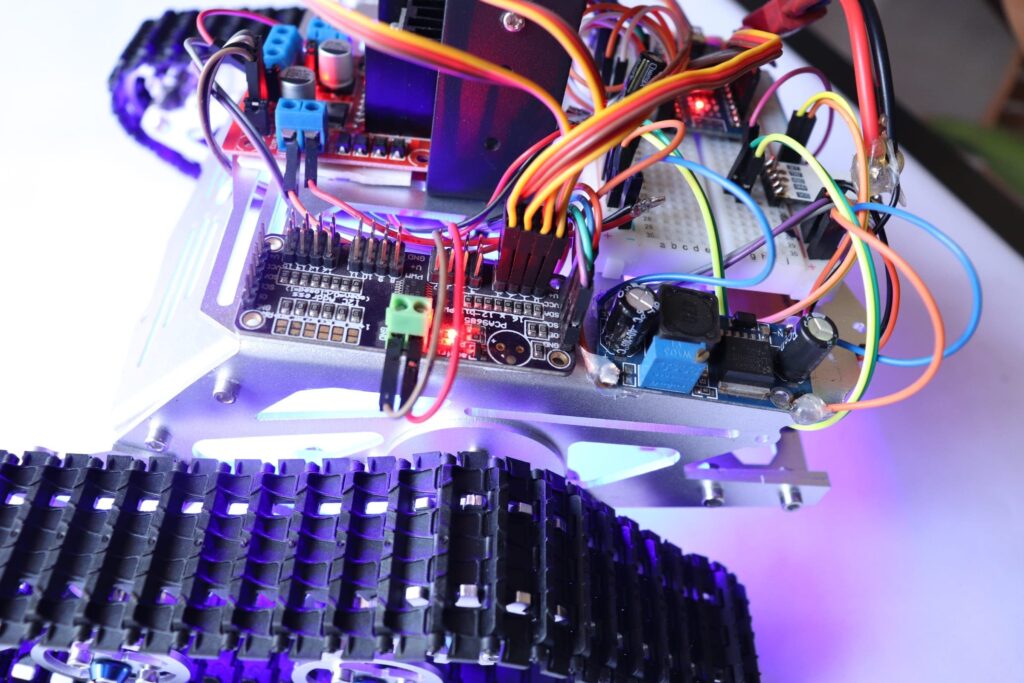
robotin tärkein osa on alusta, johon kiinnitämme kaikki osat käsivarsi mukaan lukien.
sain robottikäsipaketin banggood.com. Tämä robottivarsi on valmistettu hyvälaatuisesta alumiinista ja on todella kevyt. Tässä on niin monta kiinnityspistettä, joiden avulla voimme yhdistää mihin tahansa robottirunkoon/alustaan ilman porausreikiä.
Klikkaa tästä tarkistaaksesi sen
on 4 servomoottoria, jotka antavat robottikädelle yhteensä 3 vapausastetta. Servomoottorit ovat mukana ja käyttöjännite on 4,8-6V.
tämän voi ostaa joko servomoottorin mukana tai erikseen.
alustan, jolla tein tämän pick and place-robotin, haluaisin puhua. Minulla on tämä pakkaus. banggood.com. ei vain tämä, heillä on niin monenlaisia robotti kehyksiä, moottorit ja lähes kaikki anturit tehdä Arduino, Vadelma pi ja muut elektroniikka ja harrastus hankkeita. Saat kaikki nämä asiat edulliseen hintaan todella nopea ja laadukas toimitus.
ja hienoa tässä paketissa on se, että ne tarjoavat kaikki tarvittavat työkalut rungon kasaamiseen.
Hanki DIY-Robottipakkauksesi Banggoodilta
Klikkaa tästä tarkistaaksesi sen!!
Servomoottoriohjaus
PCA9685 on 16-kanavainen 12-bittinen PWM I2C-väyläohjattu Servomoottoriohjain. Kuljettaja voi helposti liittää Arduino, Vadelma Pie ja helposti ohjelmoida hallita yhden tai useita servomoottoreita ja tehdä oman RC lentokone, auto, laiva, quadrapod, hexapod tai mitä tahansa haluat.
seuraa tätä linkkiä saadaksesi lisätietoja servomoottorin kuljettajasta.
Pick and Place Robot – Connections
tässä käytetään 12 V: n virtalähdettä koko robotin käynnistämiseen. Syötämme raaka 12 voltin LED ja Moottorin kuljettaja IC jännite Moottori.
sitten käytämme säätimeä, joka laskee jännitteen 5V: hen ja syöttää sen Arduinolle, HC12: lle ja Servomoottorille.
tasavirtamoottoreita voi ajaa hyvällä moottorinkuljettajalla IC: llä. Tässä projektissa aion käyttää Dual H Bridge Motor Driver IC-L293D, joka voi ohjata kahta servomoottoria kerrallaan.
jos haluat lisätietoja TASAVIRTAMOOTTOREIDEN ajamisesta L293D IC: llä, klikkaa tästä. Jos olet uusi tässä, on parempi käydä tämä läpi ennen kuin siirryt seuraavaan vaiheeseen saadaksesi paremman käsityksen hankkeesta.
liitä kaikki komponentit alla esitetyllä tavalla.
annamme arduinolle virtaa 5 V: n voimapankilla ja käytämme Arduinon 5 V: n Voutia kaikkien muiden moduulien käynnistämiseen.
Arduino – Servo motor Driver
- 5 Vout – VCC Arduino
- Gnd – Gnd
- SDA – SDA
- SCL – SCL
Arduino – HC12
- 5 Vout – VCC Arduino
- Gnd – Gnd
- 10 – TX
- 11 – Rx
Servo motor Driver – Servo Motor
- Servo 1 – Port 000
- Servo 2 – Port 001
- Servo 3 – Port 002
- Servo 4 – Port 003
Arduino – L293D
- Pin 2 – Motor 1 A
- Pin 3 – Motor 1 B
- Pin 4 – moottori 2 A
- Pin 5 – moottori 2 B
L293D
H-silta toimii vain, jos Käyttöönottotappi on asetettu logiikalle 1
yksi asia on pidettävä mielessä tätä IC: tä käytettäessä on kaksi nastaa, joihin meidän on syötettävä ottoteho. Pin 8 ja Pin 16; molemmat ovat täysin eri tarkoituksiin. Pin 9 on ajo moottori, joka voi käsitellä jännite 6 V 30 voltin ja Pin 16 joka valtaa IC sisäinen piiri. Missään tapauksessa, sinun ei pitäisi vaihtaa näitä kahta nastat tai se voi polttaa pois siru.
koodi
lataa alla oleva koodi alla olevan latauslinkin avulla ja lataa se sinulle DIY-robotille, niin olet valmis menemään.

Download
lets Ride!!!
kun koodi on ladattu pick and place-robottiisi, voit liittää robotin 12 V: n virtalähteeseen ja robotin langattoman ohjaimen 5 V: n virtalähteeseen.
nyt robottia pitäisi pystyä ohjaamaan etänä langattoman ohjaimen avulla.
tämä on vasta alkua. Me RootSaid-ryhmä kehittelemme langatonta ohjauskäsinettä, jolla voidaan ohjata koko robottia, myös robottikäsivartta. Mutta tässä hanskassa on jotain siistiä.
tämä käsine pystyy tunnistamaan käden eleet ilman Flex-anturia. Kuulit oikein. Haluatko tietää lisää? Ole osa Rootsaidia.
tilaa RootSaid-sivusto yksinkertaisesti syöttämällä alla oleva sähköpostisi tunnus. Saat ilmoituksen aina, kun opetusohjelma on käytettävissä voit tinker kanssa.