Håper du har gått gjennom introduksjonen del Av Spinell Crux L2-Arduino Plukke Og Plassere Robot Med Robotarm. Ser kult under glødende lys rett? Hvorfor ikke bygge en selv? Her lærer vi å bygge en robot og koble en robotarm på toppen av den og bygge vår EGEN DIY pick and place robot.
Vi vil gi deg design, kode, kretsdiagrammer og koblinger for å kjøpe din egen robotarm, robotsett, chassis og sensormoduler som brukes i dette prosjektet.
Prøv å lage en selv, og hvis du står fast med prosjektet, kan du alltid kontakte oss eller stille spørsmål i kommentarfeltet eller I Vår WhatsApp-gruppe. Så uten videre, la komme i gang med prosjektet!
Arduino Plukke Og Plassere Robot Video Tutorial
Først ta på video Av Plukke Og Plassere Roboten vi har gjort.
Først la meg fortelle deg litt om komponentene jeg pleide å bygge denne pick and place robot.
Arduino Plukke Og Plassere Robot Komponenter Som Trengs
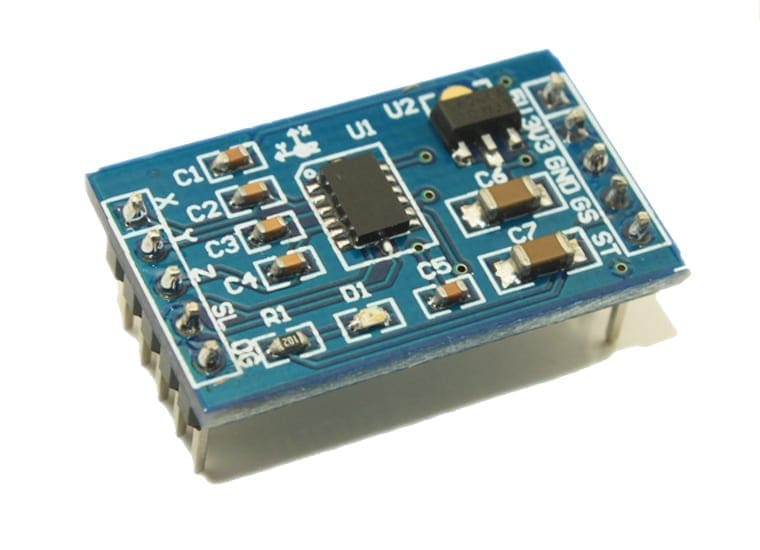
et akselerometer er en sensor som kan brukes til å fornemme akselerasjonen på grunn av tyngdekraften på ulike akse som virker på et objekt. Ved å bruke dette kan vi enkelt beregne hellingen av et objekt med hensyn til Bakken. Vi kjører Vår Spinel Crux ved Hjelp Av x og Y tilt analoge verdier.
her bruker JEG MMA7361 akselerometer for å kontrollere retningen til Vår Geststyrte Robot; du kan bruke et akselerometer som vil gi analoge verdier I X og Y retning. Grunnen til at jeg bruker dette akselerometeret er, vi kan gi 5 volt samt 3.3 volt Som Vcc til dette akselerometeret. siden Jeg bruker Arduino MKR1000, kan jeg koble 3.3 Volt direkte fra Arduino. Det er også lite veldig lett og kan enkelt kobles Til Arduino Og Raspberry Pi uten mye komplikasjon. hvis du vil kan du kjøpe denne akselerometer for en billig pris fra banggood.com.
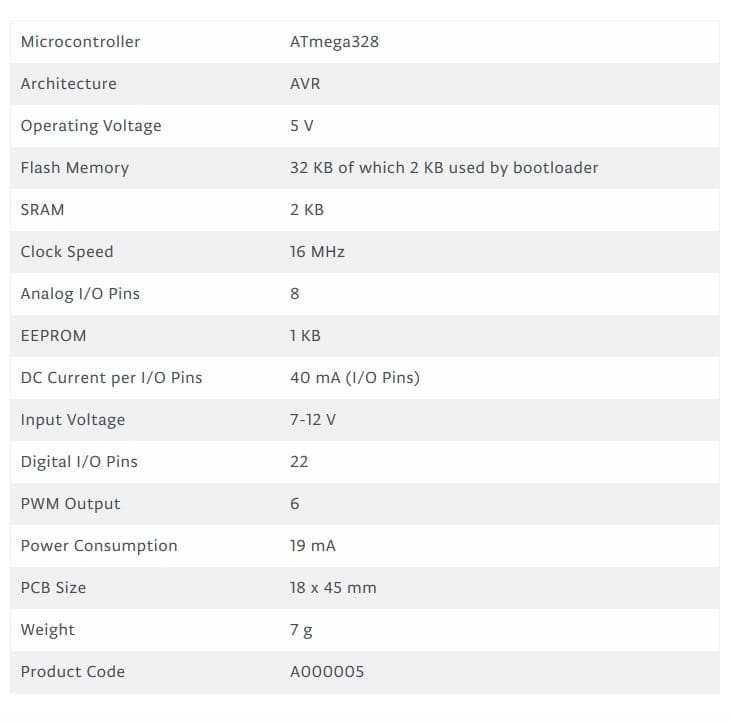
Arduino Nano
i dette prosjektet må vi bruke to micorcontroller-en for kontrolleren som vil samle alle sensordataene og overføre dem til den trådløse modulen og en annen på roboten, som vil samle data fra mottakermodulen, behandle dem og kontrollere robotarmen og plukkingsroboten. Arduino Nano er veldig liten og kan enkelt monteres på toppen av brødbrettet. Dette kan enkelt programmeres ved HJELP AV EN PC via USB Ved Hjelp Av Arduino IDE
dette kortet kan drives med Mini USB-porten. Gjennom pin 30 kan vi levere en uregulert spenningskilde på 6 TIL 20v eller gjennom pin 27, vi kan tilby en regulert strømkilde PÅ 5V. strømvalget blir automatisk gjort av Nano-kortet.
Lær Arduino Den Enkle Måten
er Du ny På Arduino? Ønsker du å forbedre dine ferdigheter I arduino programmering? Du er på rett sted. Vi har en komplett nybegynnernivåopplæring For Arduino som dekker alt fra bunnen av. I denne Gratis Arduino-Opplæringen for Nybegynnere, vil vi ta en titt På Introduksjon Til Arduino-plattformen, komme i gang med Arduino IDE, forskjellige Typer Arduino-brett og mange DIY-prosjekter ved Hjelp Av Arduino. Sjekk det ut!
La oss begynne å lære Arduino
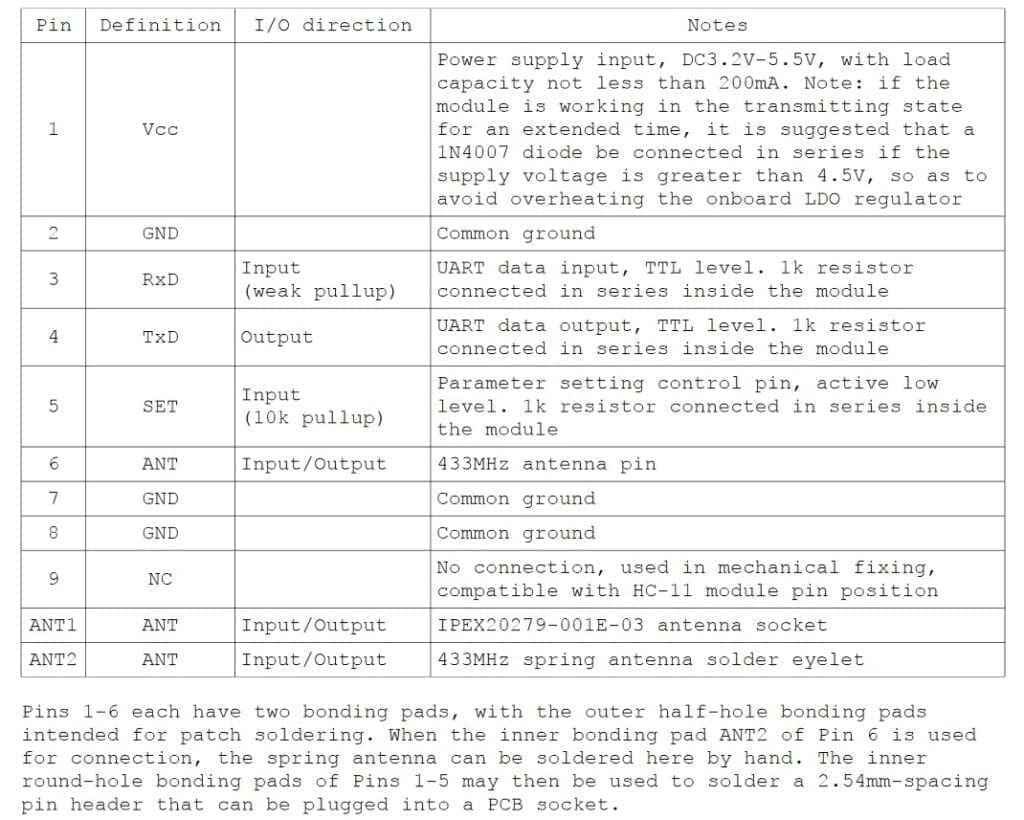
HC12
HC 12 er en veldig billig langdistanse trådløs modul som kan brukes til trådløs seriell kommunikasjon over en lang avstand på opptil 1,7 KM. Modulen er veldig kompakt lett og breadboard-vennlig som gjør dette til den beste trådløse kontrolleren for vårt prosjekt.

Pinout
Testing HC12 Tilkobling
#include <SoftwareSerial.h>SoftwareSerial HC12(10, 11); // HC-12 TX Pin, HC-12 RX Pinvoid setup() {Serial.begin(9600); // Serial port to computerHC12.begin(9600); // Serial port to HC12}void loop() {while (HC12.available()) { // If HC-12 has dataSerial.write(HC12.read()); // Send the data to Serial monitor}while (Serial.available()) { // If Serial monitor has dataHC12.write(Serial.read()); // Send that data to HC-12}}
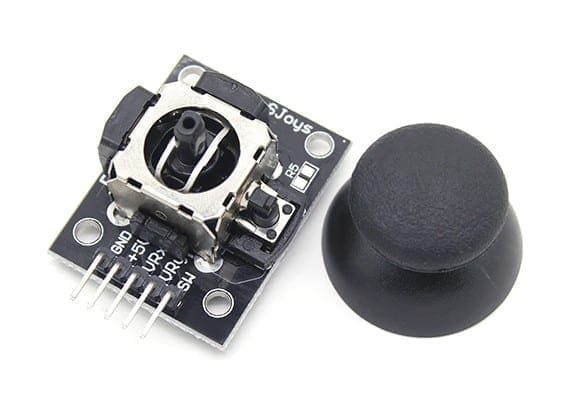
Joystick
Dette er den mest brukte robotkontrolleren som kommer med ulike ROBOT DIY robot kit/robotarm kit som er bygget for å fungere med arduino. Designet er ganske enkelt og er veldig enkelt å bruke. Den bruker to potensiometre for å beregne bevegelsen i x-aksen og y-aksen og en bryter for å fornemme knappetrykket.
Dette kan enkelt kobles til arduinos analoge pinner og lese analoge verdier direkte.
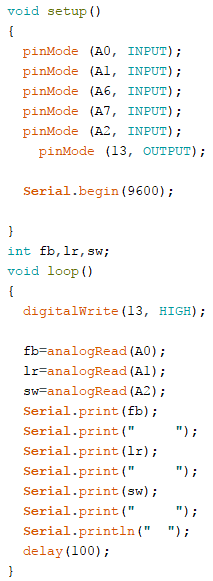
Last Ned
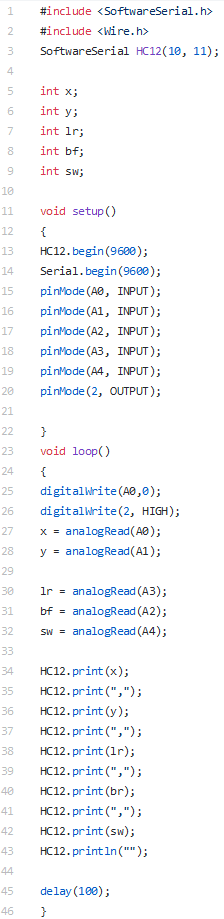
før du laster opp hovedkoden, må du kontrollere at joysticken fungerer ved å bruke denne koden. Last ned koden fra lenken ovenfor. I dette eksemplet samler vi bare dataanalogutgangene fra Joysticken ved hjelp av de analoge pinnene (a0, A1,a2) av arduino. Disse verdiene lagres i variablene og skrives senere ut på seriell skjerm.
vi vil dele dette innlegget i to deler
1-Pick and Place Robot Fjernkontroll
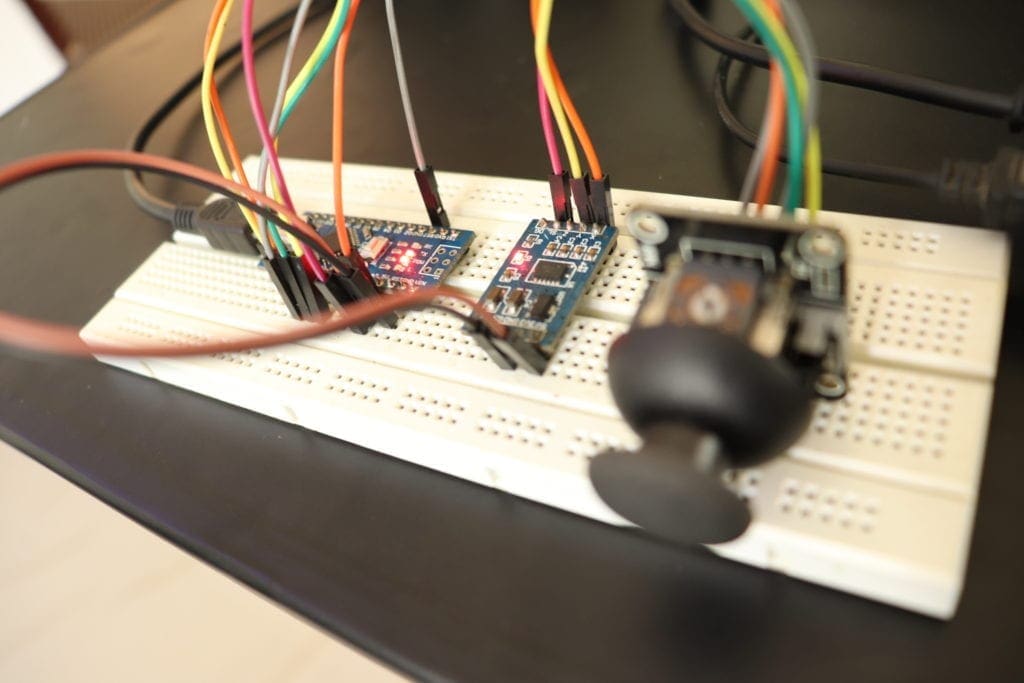
Senderen består av et brødfjel der vi monterer alle sensorer og komponenter for å få dataene som brukes til å kjøre pick and place robot og robotarmen. Dette inkluderer et akselerometer, en joystick og EN HC12-modul.
vi vil bruke akselerometeret til å kontrollere robotarmen og joysticken for å kontrollere roboten. For nå vil vi bruke joystick-knappen for å lukke robothånden. Dataene fra disse sensorene overføres trådløst til DIY-roboten ved HJELP AV EN HC12-modul.
2-Plukkingsroboten
Her vil jeg fortelle deg hvordan du lager en robotarm, bygger en robot og monterer armen på toppen av roboten. Du vil også lære å programmere Arduino for å lese dataene som kommer FRA den trådløse kommunikasjonsmodulen – HC12, behandle DEN, og hvordan du fjerner robotarmen Med Arduino sammen med roboten.
Læring DIY Robotikk har Aldri vært SÅ ENKELT!
DIY Robotics ER en morsom og enkel ting du kan lære i løpet av minutter hvis du har en skikkelig guide. Vil du Lære Robotikk, men vet ikke hvor du skal begynne? DA ER DETTE til deg. HER vil vi hjelpe deg med Å komme i gang MED DIY Robotics med enkle å følge, 100% GRATIS, trinnvise instruksjoner fra Grunnleggende Robotikk, Deler Av Robot, og så vil vi starte komplette trinnvise opplæringsprogrammer. Her vil du også finne en fantastisk samling Av Robotikk Prosjekt Tutorials fra nybegynner nivå til avansert for deg å komme i gang MED DIY Robotics.
Begynn Å Lære Robotikk
Del 1-Fjernkontrollen
som nevnt tidligere, ER DENNE DIY-Roboten en fjernstyrt robot. Så i kontrollerseksjonen har vi et brødbrett, en joystick – for å kontrollere bevegelsen av roboten og lukking og åpning av robotenes knyttneve, et akselerometer-for å flytte robotarmen og en trådløs modul for å overføre disse dataene til roboten.
Tilkoblinger
bare koble alle komponentene som vist nedenfor. Vi skal drive Arduino MED EN 5v makt bank og bruke 5 V Vout av arduino å slå opp alle de andre modulene.
Fjernkontrollen PCB
i min forrige video viste jeg hvordan du lager Denne Trådløse Fjernkontrollen til RC-Roboten din ved hjelp av et brødfjel akselerometer, knapper og EN HC12 trådløs modul. Hvis du ikke har sett det ennå, vennligst se videoen nedenfor først. Fordi vi skal bruke den fjernkontrollen til å styre denne roboten.
I Utgangspunktet hva denne fjernkontrollen gjør er, den leser analoge og digitale data fra sensorer som akselerometer knapper joystick og lagre dem i separate variabler. Disse variablene vil bli kombinert sammen for å danne en enkelt lang streng, og denne strengen vil bli sendt til vår robot ved HJELP AV HC12 wireless module.
Tegning Skjemaer og PCB Design Ved Hjelp Av Altium
så jeg brukte Altium Designer til å tegne kretsen og designe PCB. Det er et kraftig verktøy som kan brukes til å designe og lage Dine Egne Pcb for prosjektet, samt komplekse Og multiplayer Pcb for industriell bruk. Her er linken Til altium prøveversjon. Så sørg for at du sjekke det ut.
Krets
jeg laget en krets som inkluderte alle komponentene: joystick, akselerometer, arduino nano og hc12 modul koblet TIL gpio pin av arduino og montert på en brødfjel.

Det fungerte feilfritt, men problemet var, hele styret så veldig rotete med alle jumper ledninger går her og der. Så jeg bestemte MEG for Å gå MED PCB.
I PCB-versjonen la jeg til 4 brytere som jeg skal bruke til neste prosjekt.
jeg har også lagt til en 7805 regulator som vil hjelpe meg å gi en inngangsspenning mellom 7V OG 35V, slik at jeg kan bruke EN 5V USB strømforsyning, 9v batteri eller til og med 12 V Lipo batteri uten problemer. Jeg har også lagt til noen indikatorlamper som vil gi meg beskjed hvis noe sluttet å fungere. Du finner kretsen i lenken nedenfor.
PCB Layout
Altium PCB designer kan også brukes til Å LAGE PCB layout. Dette er oppsettet jeg laget ved hjelp av kretsen. Som du kan se dette er en tolags PCB, som betyr ruting er der på begge sider-oversiden samt undersiden.

På venstre side av brettet forlot jeg litt tomt plass For å holde batteriene Mine Nå har Jeg Gerber-filen med meg. Alt jeg måtte gjøre var å bestille PCB.
Når jeg fikk alle komponentene, loddet jeg dem alle sammen, og dette er min endelige PCB. Du ser, alle komponentene er koblet til brettet nå.
int x;int y;int lr;int bf;int sw;void setup(){ Serial.begin(9600);pinMode(A0, INPUT);pinMode(A1, INPUT);pinMode(A2, INPUT);pinMode(A3, INPUT);pinMode(A4, INPUT);pinMode(2, OUTPUT);}void loop(){digitalWrite(A0,0);digitalWrite(2, HIGH);x = analogRead(A0);y = analogRead(A1);lr = analogRead(A2);bf = analogRead(A3);sw = analogRead(A4);Serial.print("Accelerometer");Serial.print("X = ");Serial.println(x);Serial.print("Y = ");Serial.println(y);Serial.println("");Serial.print("Joy Stick");Serial.println("");Serial.print("Left/Right = ");Serial.println(lr);Serial.print("Back/Forward = ");Serial.println(bf);Serial.print("Switch = ");Serial.println(sw);Serial.println("");Serial.println("");delay(250);}
når denne koden er lastet opp, start seriell skjerm og sjekk om alle disse verdiene vises riktig.
deretter kan du laste opp den virkelige koden nedenfor.
Kode
bare last ned koden nedenfor ved hjelp av nedlastingskoblingen nedenfor og last den opp til kontrolleren.
Last Ned
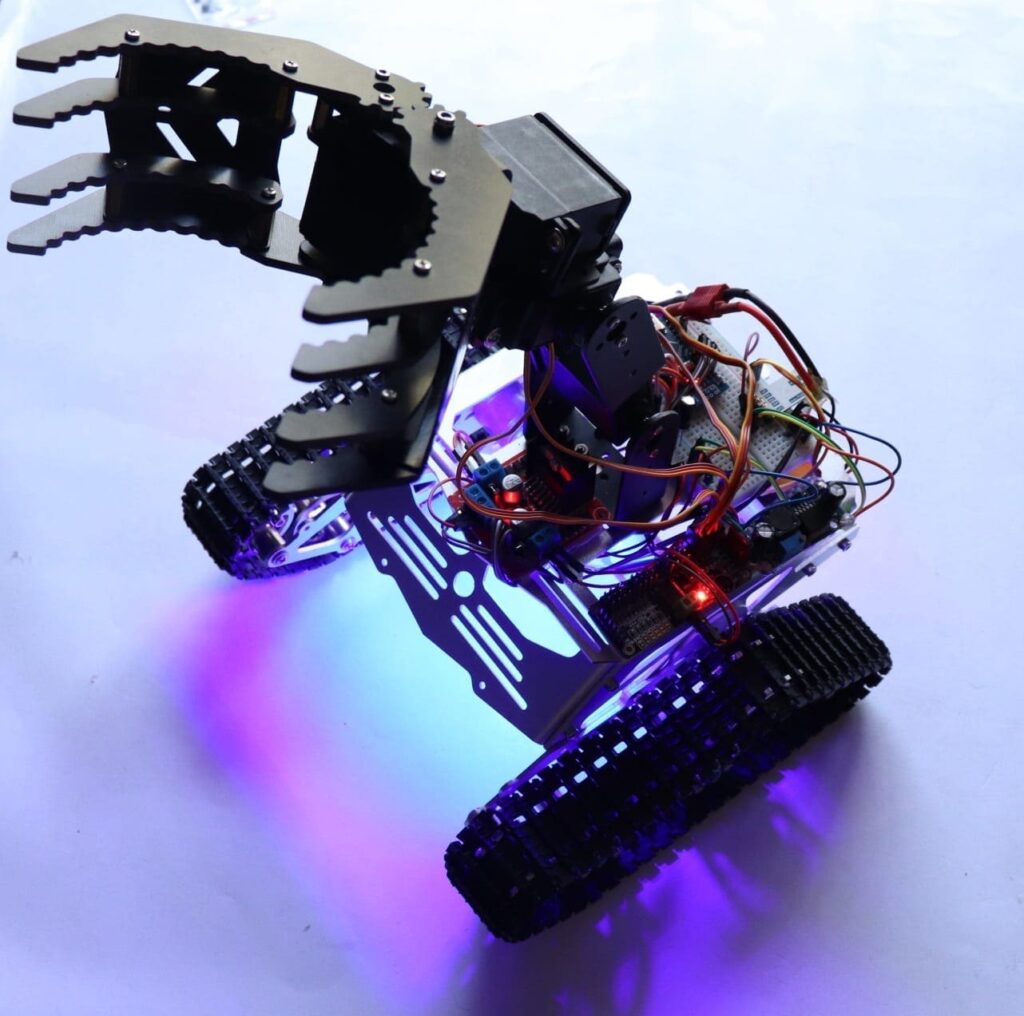
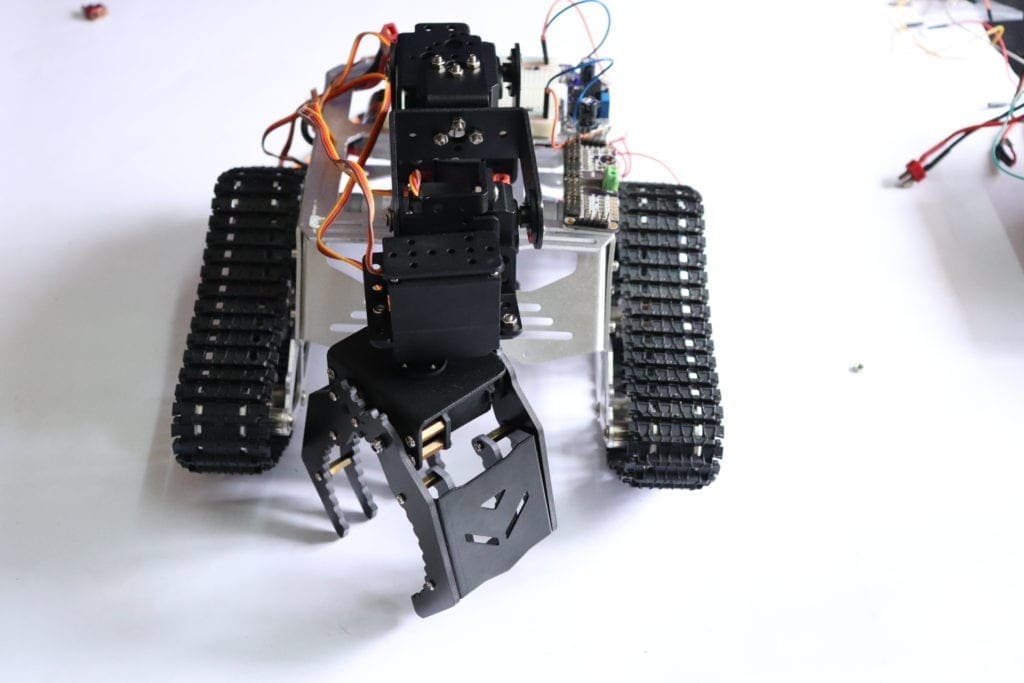
Del 2-Roboten
hoveddelen av roboten er chassiset der vi monterer alle komponentene, inkludert armen.
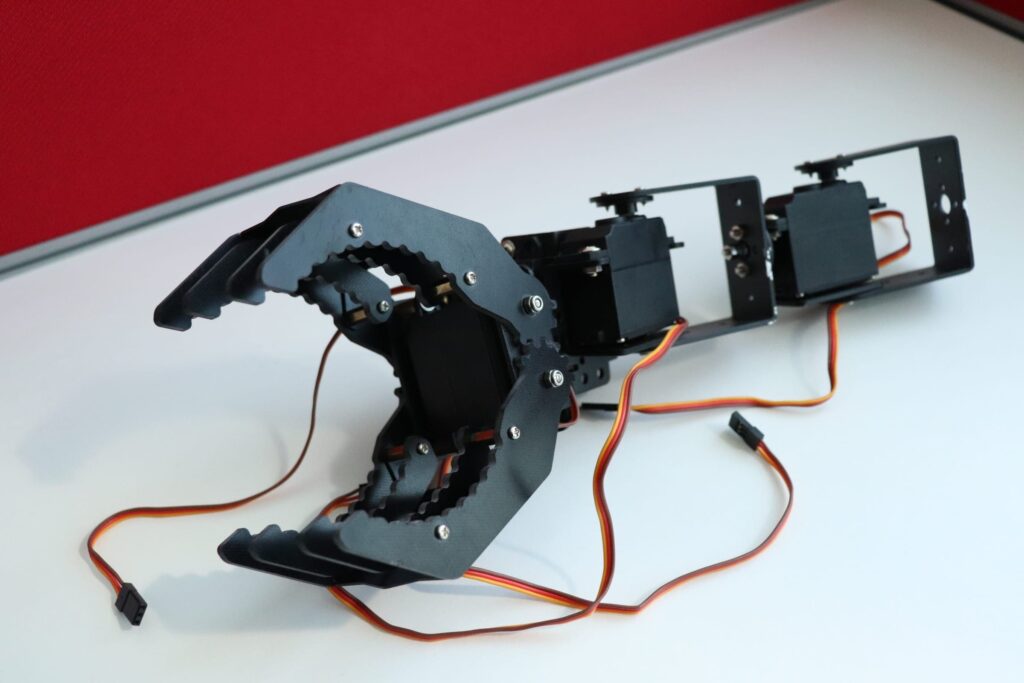
jeg fikk robotarmsettet fra banggood.com. Denne robotarmen er laget av aluminium av god kvalitet og er veldig lett. Denne har så mange monteringspunkter som gjør at vi kan koble til alle robotlegemer / chassis uten å bore monteringshull.
Klikk her for å sjekke det ut
Det er 4 servomotorer som gir robotarmen totalt 3 Frihetsgrader. Servomotorene er inkludert og arbeidsspenningen er 4.8-6V.
du kan enten kjøpe dette sammen med servomotoren,eller du kan kjøpe dem separat.
chassiset jeg brukte til å lage denne pick and place-roboten er noe jeg vil snakke om. Jeg fikk dette settet banggood.com. Ikke bare denne, de har så mange typer robotrammer, motorer og nesten alle sensorer for å gjøre Arduino, raspberry pi og andre elektronikk-og hobbyprosjekter. Du vil få alle disse tingene for en billig pris med veldig rask og kvalitet frakt.
og det flotte med dette settet er at de gir alle verktøyene du trenger for å montere rammen sammen.
Få DIN DIY Robot Kit Fra BangGood
Klikk her For Å Sjekke det ut!!
Servomotorkontroll
DEN PCA9685 ER en 16 Kanal 12 Bit Pwm I2C-buss kontrollert Servomotor Driver. Føreren kan veldig enkelt kobles til arduino, Raspberry Pie og enkelt programmert til å styre enkle eller flere servomotorer og lage ditt EGET RC-fly, bil, skip, quadrapod, hexapod eller alt du vil.
Følg denne linken for å vite mer om servomotoren driver.
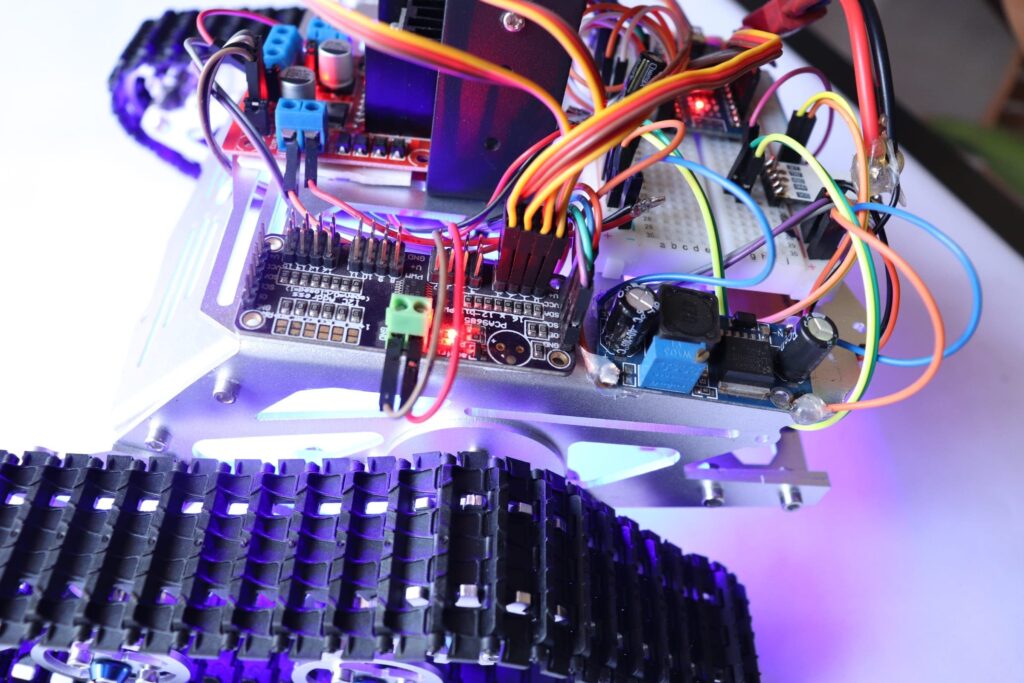
Plukke Og Plassere Robot-Tilkoblinger
Her skal vi bruke en 12 V strømforsyning for å drive opp hele roboten. Vi mate rå 12 Volt TIL LED og motor driver IC spenning i for motor.
da bruker vi en regulator for å gå ned spenningen TIL 5V og mate Den Til Arduino, HC12 og Servomotor driver.
DU kan kjøre DC-motorer ved hjelp av en god motordriver IC. I dette prosjektet vil jeg bruke Dual H Bridge Motor Driver IC-L293D som kan styre to servomotorer om gangen.
for mer informasjon om kjøring AV LIKESTRØMSMOTORER VED HJELP AV L293D ic klikk her. Hvis du er ny på dette, er det bedre å gå gjennom dette før du går videre til neste trinn for å få en bedre forståelse av prosjektet.
bare koble alle komponentene som vist nedenfor.
Vi vil drive Arduino Med EN 5v strømbank og bruke 5 V Vout av arduino til å slå opp alle de andre modulene.
Arduino – Servo motor Driver
- 5 Vout – VCC Arduino
- Gnd – Gnd
- SDA – SDA
- SCL – SCL
Arduino – HC12
- 5 Vout – VCC Arduino
- Gnd – Gnd
- 10 – TX
- 11 – Rx
Servo motor Driver – Servo Motor
- Servo 1 – Port 000
- Servo 2 – Port 001
- Servo 3 – Port 002
- Servo 4 – Port 003
Arduino – L293D
- Pin 2 – Motor 1 A
- Pin 3 – Motor 1 B
- Pin 4-Motor 2 A
- Pin 5 – Motor 2 B
L293D
h-broen vil bare fungere hvis Aktiveringsstiften er satt Til Logikk 1
En ting å huske på når du bruker DENNE IC er, det er to pinner der vi må levere inngangseffekten. Pin 8 Og Pin 16; begge er for helt forskjellige formål. Pin 9 er for å drive motoren som kan håndtere en spenning på 6 V til 30 Volt Og Pin 16 som vil slå OPP IC for den interne kretsen. Under ingen omstendigheter bør du ikke bytte ut disse to pinnene, eller det kan brenne av brikken.
Kode
bare last ned koden nedenfor ved hjelp av nedlastingskoblingen nedenfor og last den OPP TIL DEG DIY robot, og du vil være god å gå.

Last Ned
Lets Ride!!!
når koden er lastet opp til pick and place-roboten, kan du koble roboten til en 12 V strømkilde og den trådløse kontrolleren til en 5 V strømkilde.
nå skal du kunne styre roboten eksternt ved hjelp av den trådløse kontrolleren.
Dette er bare en begynnelse. Vi, RootSaid-gruppen jobber med en trådløs kontrollhanske som kan brukes til å kontrollere hele roboten, inkludert robotarmen. Men det er noe kult om denne hansken.
denne hansken kan registrere håndbevegelser uten Flex sensor. Ja, du hørte det riktig. Vil du vite mer? Bli En Del Av RootSaid.
Abonner RootSaid Nettside ved å skrive Inn Din E-ID nedenfor. Du vil motta varsel når opplæringen er tilgjengelig for deg å tinker med.