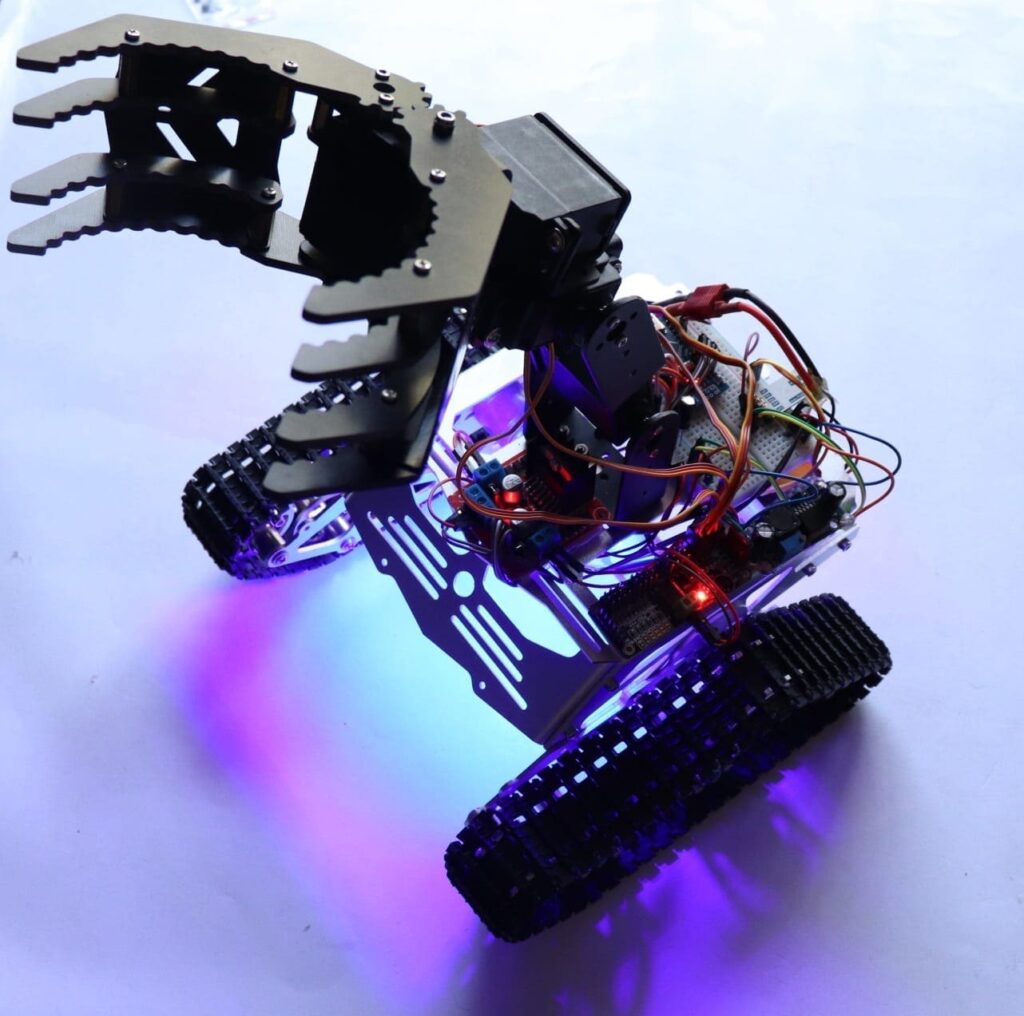
Hoop dat u zijn gegaan door de introductie van een deel van de Spinel Crux L2 – Arduino-Pick and Place Robot met een robotarm. Ziet er cool uit onder gloeiende lichten, toch? Waarom bouw je er geen voor jezelf? Hier leren we hoe we een robot bouwen en er een robotarm op aansluiten en onze eigen doe-het-zelf-pick-and-place-robot bouwen.
wij zullen u voorzien van het ontwerp, de code, schema ‘ s en links om uw eigen Robotarm, robotkit, chassis en sensormodules te kopen die in dit project worden gebruikt.
probeer er zelf een te maken en als u vastzit aan het project, kunt u altijd contact met ons opnemen of uw vragen stellen in het opmerkingenveld of in onze WhatsApp-groep. Dus zonder verder oponthoud, laten we beginnen met het project!
Arduino Pick and Place Robot Video Tutorial
neem eerst de video van de Pick and Place Robot die we hebben gemaakt.
laat me eerst iets vertellen over de componenten die ik gebruikte om deze pick and place robot te bouwen.
Arduino Pick and Place Robotcomponenten nodig
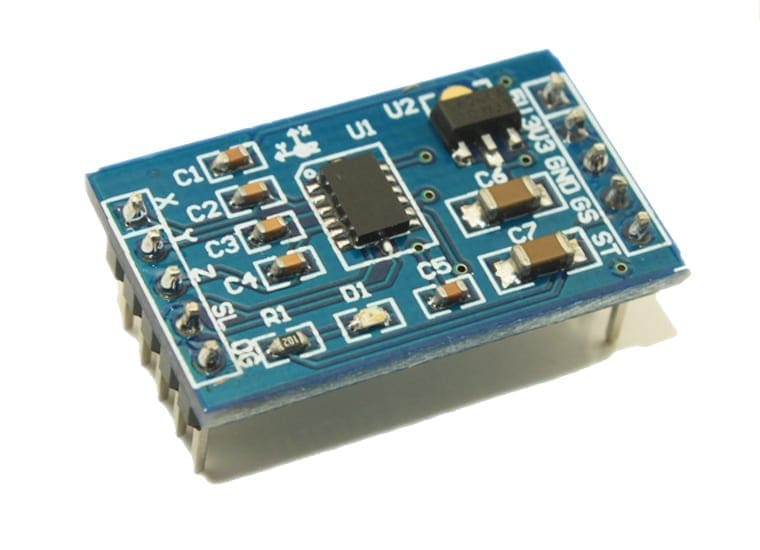
een accelerometer is een sensor die kan worden gebruikt om de versnelling als gevolg van zwaartekracht op verschillende as die op een object. Hiermee kunnen we eenvoudig de helling van een object ten opzichte van de grond berekenen. We zullen rijden onze Spinel Crux met behulp van de x en Y tilt analoge waarden.
hier gebruik ik de mma7361 accelerometer om de richting van onze Gebaargestuurde Robot te regelen; u kunt elke accelerometer gebruiken die analoge waarden in X-en Y-richting geeft. De reden waarom ik deze versnellingsmeter gebruik is dat we zowel 5 volt als 3,3 volt als Vcc aan deze versnellingsmeter kunnen leveren. aangezien ik Arduino MKR1000 gebruik, kan ik 3.3 Volt rechtstreeks van Arduino verbinden. Het is ook klein zeer lichtgewicht en kan gemakkelijk worden aangesloten op Arduino en Raspberry Pi zonder veel complicatie. als u wilt kunt u deze accelerometer kopen voor een goedkope prijs vanaf banggood.com.
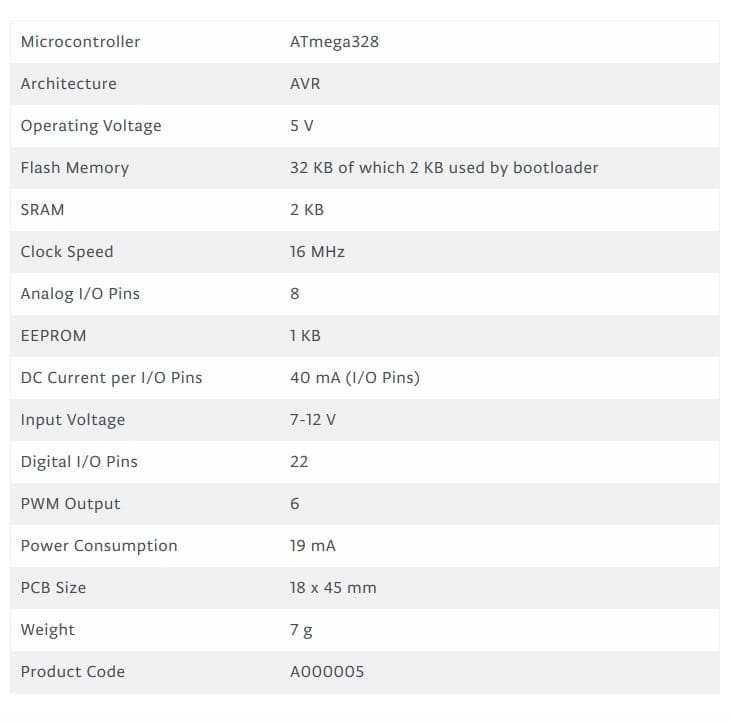
Arduino Nano
in dit project zullen we twee micorcontroller moeten gebruiken – een voor de controller die alle sensorgegevens verzamelt en naar de draadloze module verzendt en een andere op de robot, die gegevens van de ontvangermodule verzamelt, verwerkt en de Robotarm en de pick and place robot aanstuurt. De Arduino Nano is erg klein en kan eenvoudig bovenop de broodplank worden gemonteerd. Dit kan eenvoudig worden geprogrammeerd met behulp van een PC via USB met behulp van Arduino IDE
dit bord kan worden gevoed met behulp van de Mini-USB-poort. Door speld 30, kunnen wij een ongereguleerde voltagebron van 6 aan 20V leveren of door speld 27, kunnen wij een geregelde machtsbron van 5V verstrekken. de machtselectie zal automatisch door de Nano Raad worden gedaan.
Arduino leren op de gemakkelijke manier
bent u nieuw in Arduino? Wilt u uw vaardigheden in Arduino-programmering verbeteren? Je bent op de juiste plaats. Wij hebben een volledige beginner-niveau tutorial voor Arduino die alles vanaf nul behandelt. In deze gratis Arduino-Tutorial voor beginnersgids, zullen wij een blik op inleiding aan Arduino-platform nemen, begonnen met Arduino IDE, verschillende soorten Arduino-raad, en heel wat DIY-projecten die Arduino gebruiken. Kijk eens!
laten we beginnen met het leren van Arduino
HC12
HC 12 is een zeer goedkope lange afstand draadloze module die kan worden gebruikt voor draadloze seriële communicatie over een lange afstand van maximaal 1,7 KM. De module is echt compact lichtgewicht en breadboard-friendly wat dit het beste Draadloze Controlemechanisme voor ons project maakt.

Pinout
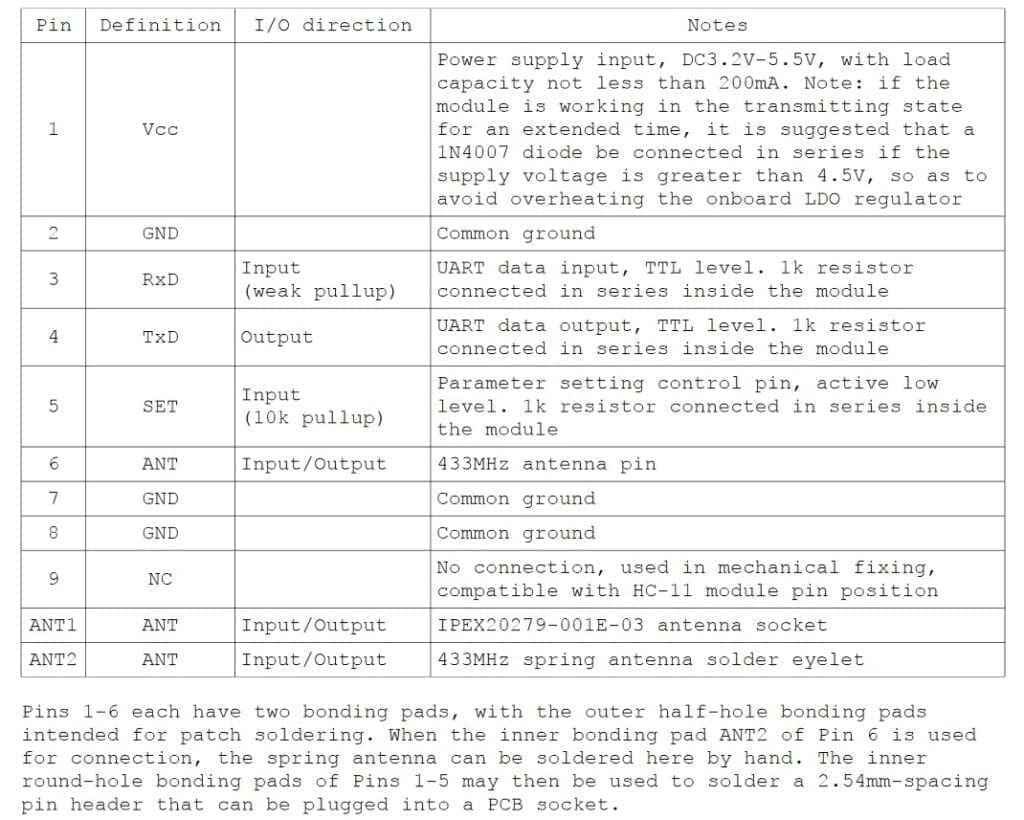
HC12-Verbinding testen
#include <SoftwareSerial.h>SoftwareSerial HC12(10, 11); // HC-12 TX Pin, HC-12 RX Pinvoid setup() {Serial.begin(9600); // Serial port to computerHC12.begin(9600); // Serial port to HC12}void loop() {while (HC12.available()) { // If HC-12 has dataSerial.write(HC12.read()); // Send the data to Serial monitor}while (Serial.available()) { // If Serial monitor has dataHC12.write(Serial.read()); // Send that data to HC-12}}
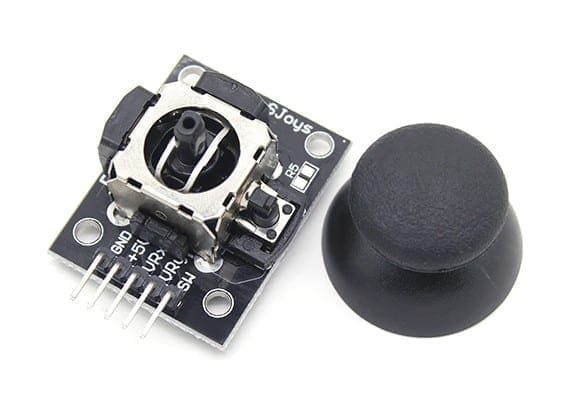
Joystick
Dit is het wijdst gebruikte robotcontrolemechanisme dat met diverse robotdiy-robotuitrusting/robotarmuitrusting wordt geleverd die om met arduino wordt gebouwd te werken. Het ontwerp is vrij eenvoudig en is zeer eenvoudig te gebruiken. Het gebruikt twee potentiometers om de beweging in de x-as en de y-as te berekenen en een schakelaar om de druk op de knop te voelen.
dit kan eenvoudig worden aangesloten op de analoge pinnen van de arduino en analoge waarden direct worden gelezen.
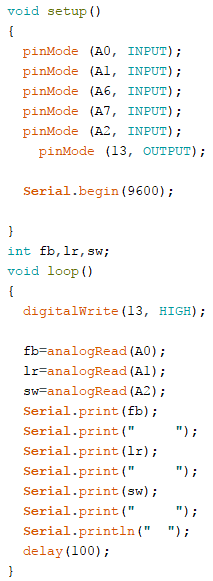
Download
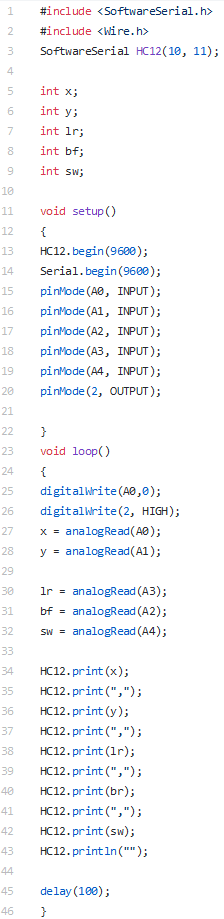
voordat u de hoofdcode uploadt, moet u ervoor zorgen dat uw joystick werkt met deze code. Download de code van de bovenstaande link. In dit voorbeeld, wat we doen is gewoon het verzamelen van de gegevens analoge uitgangen van de Joystick met behulp van de analoge pinnen (A0, A1,A2) van arduino. Deze waarden worden opgeslagen in de variabelen en worden later afgedrukt op de seriële monitor.
we zullen deze post in twee delen verdelen
1-Pick and Place Robot Remote Controller
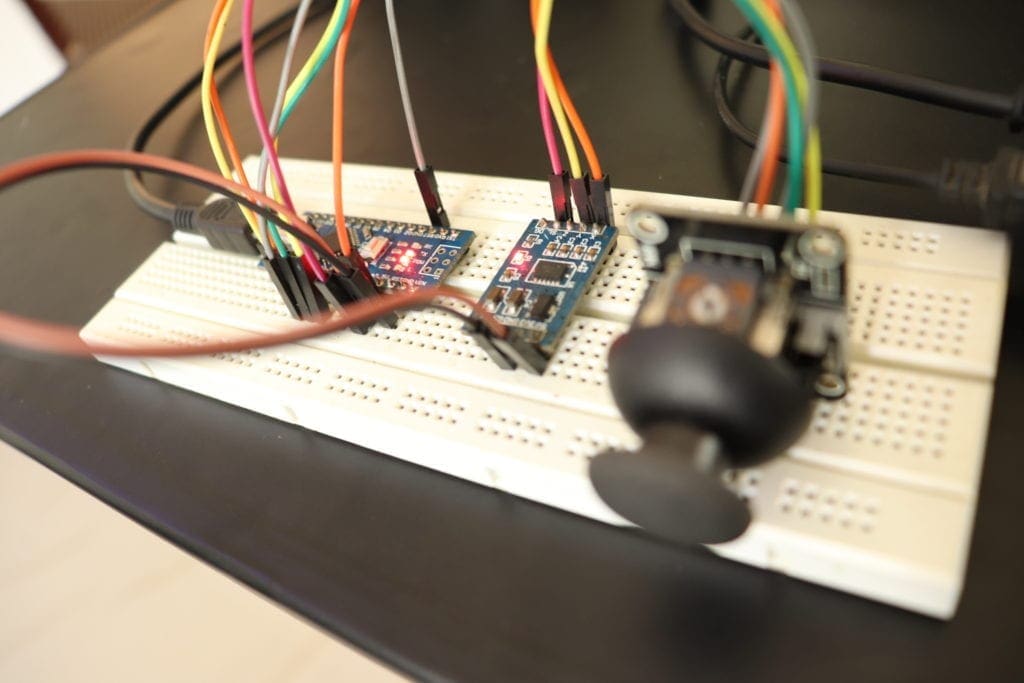
de zender bestaat uit een breadboard waarin we alle sensoren en componenten monteren om de gegevens te verkrijgen die worden gebruikt om de pick and place robot en de robotarm aan te drijven. Dit omvat een versnellingsmeter, een joystick en een HC12 module.
we zullen de accelerometer gebruiken om de robotarm te besturen en de joystick om de robot te besturen. Voor nu, zullen we gebruik maken van de joystick knop om de robothand te sluiten. De gegevens van deze sensoren worden draadloos doorgestuurd naar de doe-het-zelf robot met behulp van een HC12 module.
2-De Pick and Place Robot
hier zal ik je vertellen hoe je een robotarm maakt, een robot bouwt en de arm bovenop de robot monteert. U zult ook leren hoe te om Arduino te programmeren om de gegevens te lezen die van draadloze communicatie module – HC12 komen, het te verwerken, en hoe te om het robotic wapen met Arduino samen met de robot op afstand te controleren.
het leren van Doe-het-zelf-robotica was nog nooit zo eenvoudig!
Doe-het-zelf-Robotica is een leuk en gemakkelijk ding dat je binnen een kwestie van minuten kunt leren als je een goede gids hebt. Wil je robotica leren, maar weet je niet waar je moet beginnen? Dan is dit voor jou. Hier, zullen wij u helpen aan de slag met DIY robotica met eenvoudig te volgen, 100% gratis, stap-voor-stap instructies vanaf robotica basics, onderdelen van Robot, en dan zullen we beginnen met volledige stap-voor-stap tutorials. Hier vindt u ook een geweldige verzameling van robotica project Tutorials van beginner niveau tot gevorderd voor u om te beginnen met DIY robotica.
Start Learning Robotics
Part 1-The Remote Controller
zoals eerder vermeld, deze Doe-het-zelf Robot is een op afstand bestuurbare robot. In de controller sectie hebben we een breadboard, een joystick – om de beweging van de robot en het sluiten en openen van de vuist van de robot te controleren, een versnellingsmeter – om de robotarm te bewegen, en een draadloze module om deze gegevens naar de robot te verzenden.
verbindingen
sluit gewoon alle componenten zoals hieronder weergegeven. Wij zullen Arduino met een 5V machtsbank voeden en 5 V Vout van arduino gebruiken om alle andere modules aan te drijven.
de remote controller PCB
In mijn vorige video liet ik zien hoe je deze draadloze Remote Controller maakt voor je RC Robot met behulp van een breadboard accelerometer, knoppen en een HC12 draadloze module. Als je dat nog niet hebt gezien, bekijk dan eerst de onderstaande video. Omdat we die afstandsbediening zullen gebruiken om deze robot te besturen.
in principe leest deze afstandsbediening analoge en digitale gegevens van sensoren zoals versnellingsmeter knoppen joystick en slaat ze op in afzonderlijke variabelen. Deze variabelen worden gecombineerd tot één lange snaar en deze snaar wordt naar onze robot gestuurd met behulp van de HC12 draadloze module.
tekening schema ‘ s en PCB ontwerp met behulp van Altium
dus gebruikte ik Altium Designer om het circuit te tekenen en het ontwerp van de PCB. Het is een krachtige tool die kan worden gebruikt voor het ontwerpen en maken van uw eigen PCB ’s voor uw project, evenals complexe en multiplayer PCB’ s voor industrieel gebruik. Hier is de link naar de Altium proefversie. Dus zorg ervoor dat je het controleert.
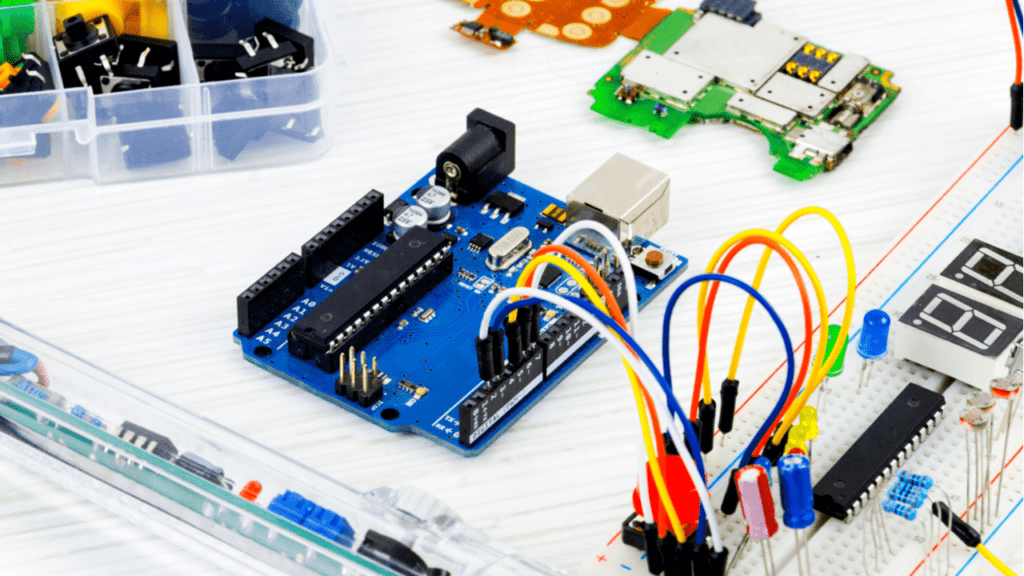
Circuit
: de joystick, accelerometer, arduino nano en hc12 module aangesloten op de GPIO pin van de arduino en gemonteerd op een breadboard.

het werkte feilloos, maar het probleem was, het hele bord zag er echt rommelig uit met alle jumper draden die hier en daar gingen. Dus besloot ik voor PCB te gaan.
in de printversie heb ik 4 switches toegevoegd die Ik zal gebruiken voor het volgende project.
ik heb ook een 7805 regelaar toegevoegd die me zal helpen om een ingangsspanning tussen 7V en 35V te leveren, zodat ik zonder problemen een 5V USB-voeding, 9V-batterij of zelfs een 12V Lipo-batterij kan gebruiken. Ik heb ook een aantal indicator LED ‘ s die me zal laten weten als er iets gestopt met werken. U vindt het circuit in de link hieronder.
PCB-lay-out
Altium PCB designer kan ook worden gebruikt om PCB-lay-out te maken. Dit is de lay-out die ik heb gemaakt met behulp van het circuit. Zoals u kunt zien is dit een dual-layer PCB, wat betekent dat routing is er aan beide zijden-de boven-en de onderkant.

aan de linkerkant van het bord heb ik wat lege ruimte gelaten om mijn batterijen te bewaren nu heb ik de Gerber vijl bij me. Ik hoefde alleen de printplaat te bestellen.
toen ik alle componenten had, heb ik ze allemaal aan elkaar gesoldeerd en dit is mijn laatste printplaat. Alle onderdelen zijn nu verbonden met het bord.
int x;int y;int lr;int bf;int sw;void setup(){ Serial.begin(9600);pinMode(A0, INPUT);pinMode(A1, INPUT);pinMode(A2, INPUT);pinMode(A3, INPUT);pinMode(A4, INPUT);pinMode(2, OUTPUT);}void loop(){digitalWrite(A0,0);digitalWrite(2, HIGH);x = analogRead(A0);y = analogRead(A1);lr = analogRead(A2);bf = analogRead(A3);sw = analogRead(A4);Serial.print("Accelerometer");Serial.print("X = ");Serial.println(x);Serial.print("Y = ");Serial.println(y);Serial.println("");Serial.print("Joy Stick");Serial.println("");Serial.print("Left/Right = ");Serial.println(lr);Serial.print("Back/Forward = ");Serial.println(bf);Serial.print("Switch = ");Serial.println(sw);Serial.println("");Serial.println("");delay(250);}
zodra deze code is geüpload, start u de seriële monitor en controleer of al deze waarden correct worden weergegeven.
dan kunt u de echte code hieronder uploaden.
Code
download de onderstaande code met de download link hieronder en upload deze naar uw controller.
Download
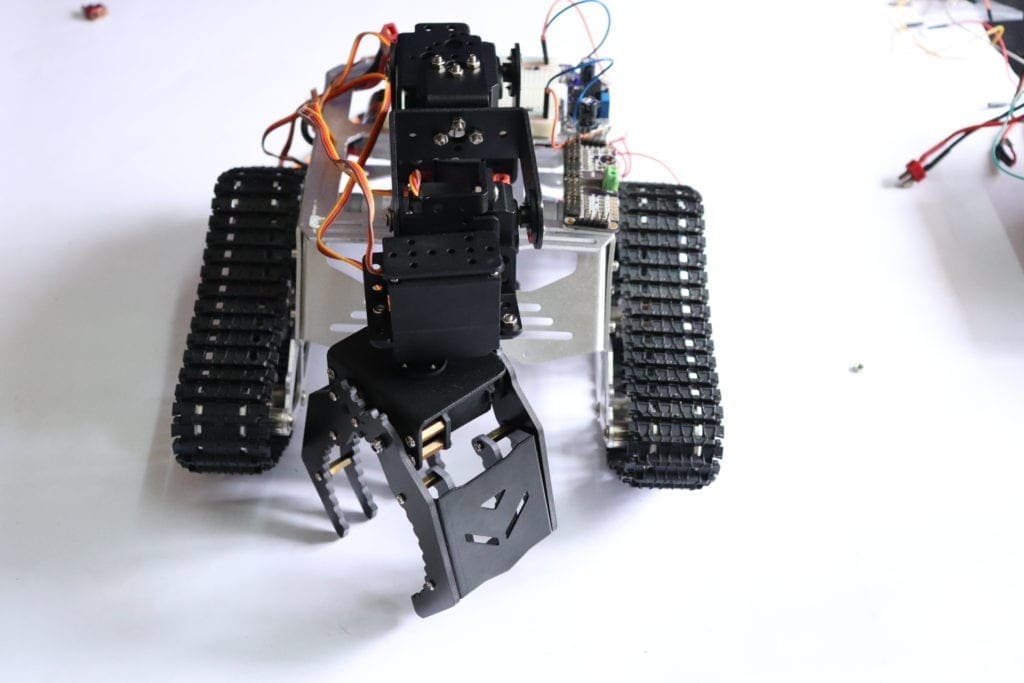
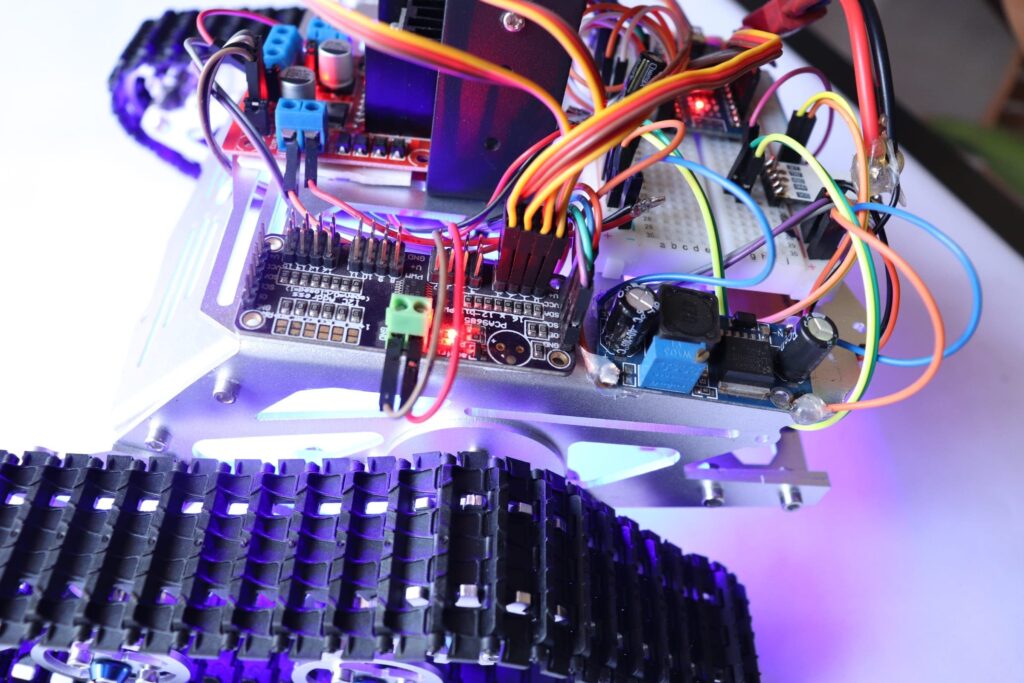
deel 2-De Robot
het hoofddeel van de robot is het chassis waarin we alle componenten, inclusief de arm, monteren.
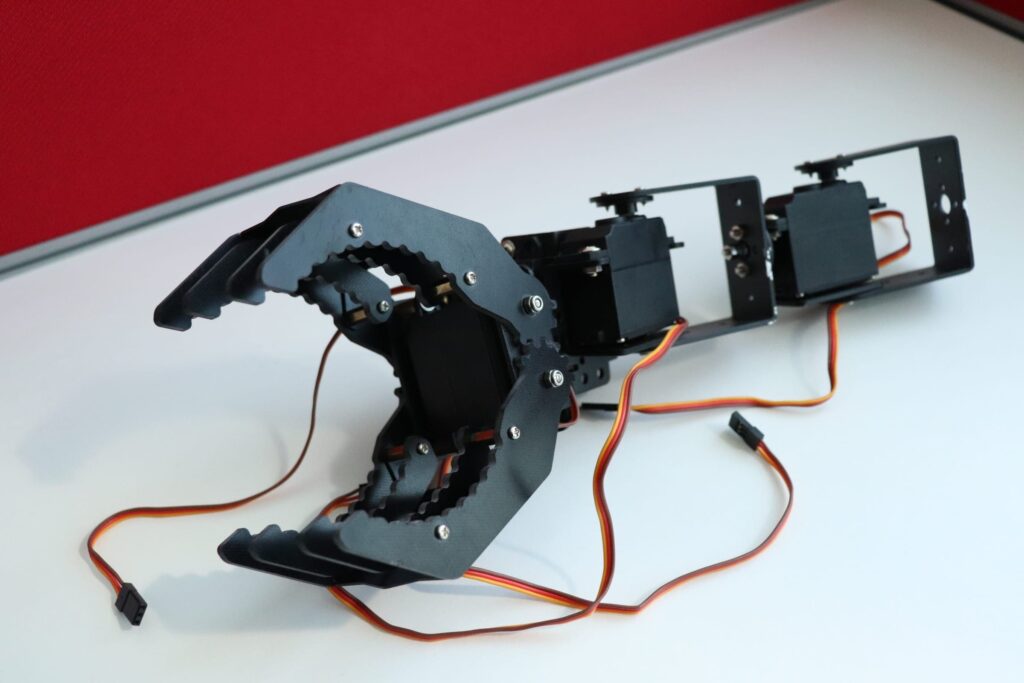
ik heb de robotarmkit van banggood.com. Deze robotarm is gemaakt van goede kwaliteit aluminium en is echt licht van gewicht. Deze heeft zo veel montagepunten die ons in staat stellen om verbinding te maken met een robot lichamen/chassis zonder het boren van montagegaten.
Klik hier om het te bekijken
er zijn 4 servomotoren die de robotarm in totaal 3 vrijheidsgraden geven. De servomotoren zijn inbegrepen en de werkspanning is 4.8-6V.
u kunt deze samen met de servomotor kopen of u kunt ze afzonderlijk kopen.
het chassis dat ik heb gebruikt voor het maken van deze pick and place robot is iets waar ik graag over wil praten. Ik heb deze kit. banggood.com. niet alleen deze, ze hebben zo veel soorten robotframes, motoren en bijna alle sensoren voor het doen van Arduino, raspberry pi en andere elektronica en hobby projecten. U krijgt al deze dingen voor een goedkope prijs met echt snel en kwaliteit verzending.
en het mooie aan deze kit is dat ze alle tools bieden die je nodig hebt om het frame samen te stellen.
Haal uw Doe-het-zelf robotkit uit BangGood
Klik hier om het te bekijken!!
Servomotorbesturing
de PCA9685 is een 16-Kanaals 12-Bit PWM I2C-busbestuurde Servomotorbesturing. De Driver kan zeer gemakkelijk worden aangesloten op uw arduino, Framboos taart en Gemakkelijk geprogrammeerd om enkele of meerdere servomotoren te controleren en uw eigen RC Vliegtuig, auto, schip, quadrapod, hexapod of om het even wat u wilt te maken.
volg deze link om meer te weten te komen over de servomotorstuurder.
Pick and Place Robot – aansluitingen
hier gebruiken we een voeding van 12 V voor het aandrijven van de gehele robot. We voeden de ruwe 12 Volt aan de LED en de motor driver IC voltage in voor motor.
dan gebruiken we een regelaar om spanning naar 5V te verlagen en het aan Arduino, HC12 en servomotorbestuurder te voeden.
u kunt de DC-motoren besturen met behulp van een goede motor driver IC. In dit project, zal ik dubbele H – stuurprogramma IC-L293D van de Brugmotor gebruiken die twee servomotoren tegelijk kan controleren.
voor meer informatie over het besturen van DC-motoren met behulp van L293D IC Klik hier. Als u nieuw bent in deze, is het beter om te gaan door middel van deze alvorens over te gaan tot de volgende stap om een beter begrip van het project te krijgen.
sluit gewoon alle componenten zoals hieronder weergegeven.
we zullen de Arduino voeden met een 5V powerbank en de 5 V Vout van de arduino gebruiken om alle andere modules aan te zetten.
Arduino – Servo motor Driver
- 5 Vout – VCC Arduino
- Gnd – Gnd
- SDA – SDA
- SCL – SCL
Arduino – HC12
- 5 Vout – VCC Arduino
- Gnd – Gnd
- 10 – TX
- 11 – Rx
Servo motor Driver – Servo Motor
- Servo 1 – Port 000
- Servo 2 – Port 001
- Servo 3 – Port 002
- Servo 4 – Port 003
Arduino – L293D
- Pin 2 – Motor 1 A
- Pin 3 – Motor 1 B
- Pin 4-Motor 2 A
- Pin 5-Motor 2 B
L293D
de H-brug zal alleen werken als de Enable Pin is ingesteld op logica 1
een ding om in gedachten te houden tijdens het gebruik van deze IC is, er zijn twee pinnen waar we het ingangsvermogen moeten leveren. Pin 8 en Pin 16; beide zijn voor totaal verschillende doeleinden. Pin 9 is voor het aandrijven van de motor die een spanning van 6 V tot 30 Volt aankan en Pin 16 die de IC voor het interne circuit van stroom voorziet. In geen geval moet u deze twee pinnen niet verwisselen of het kan de chip eraf branden.
Code
download de onderstaande code met behulp van de download link hieronder en upload het naar je doe-het-zelf robot en je bent klaar om te gaan.

Download
Let Ride!!!
zodra de code is geüpload naar uw pick and place-robot, kunt u uw robot aansluiten op een 12V-voedingsbron en uw draadloze robot-controller op een 5V-voedingsbron.
nu moet u de robot op afstand kunnen bedienen met behulp van de draadloze controller.
dit is slechts een begin. Wij, de RootSaid group, werken aan een draadloze bedieningshandschoen die gebruikt kan worden om de hele robot te besturen, inclusief de robotarm. Maar er is iets cools aan deze handschoen.
deze handschoen kan handgebaren detecteren zonder Flex-sensor. Ja, dat heb je goed gehoord. Wilt u meer weten? Maak deel uit van RootSaid.
abonneer u op de RootSaid-Website door simpelweg uw e-mail-ID hieronder in te voeren. U ontvangt een melding wanneer de tutorial beschikbaar is voor u om mee te sleutelen.