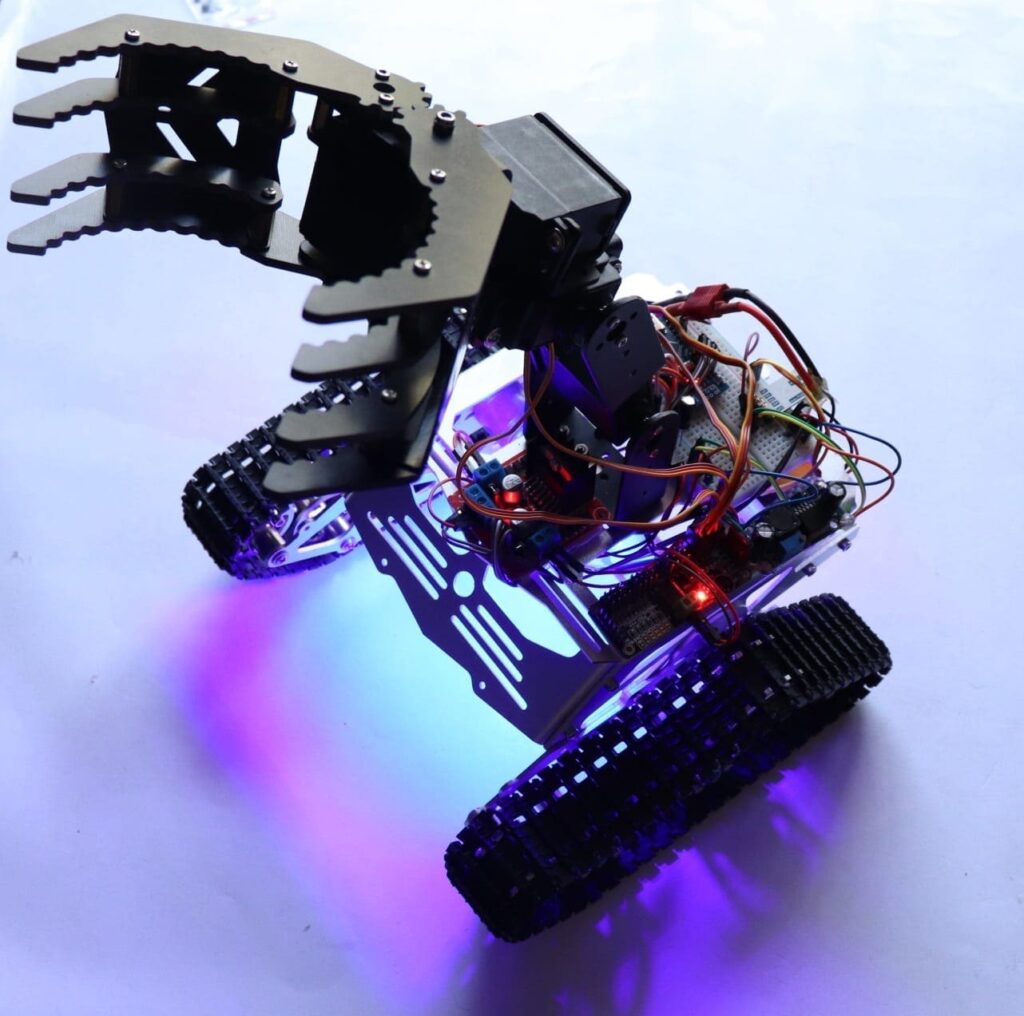
あなたがSpinel Crux L2–Arduino Pick and Place Robot with Robotic Armの導入部分を経験したことを願っています。 右光るライトの下でクールに見えますか? なぜあなた自身のためのものを構築しませんか? ここでは、ロボットを構築し、その上にロボットアームを接続し、私たち自身のDIYピックと場所のロボットを構築する方法を学びます。
このプロジェクトで使用される独自のロボットアーム、ロボットキット、シャーシ、センサーモジュールを購入するための設計、コード、回路図、リンクを提供します。
自分で作ってみて、プロジェクトに固執している場合は、いつでも私たちに連絡するか、コメントボックスまたはWhatsAppグループで質問することができます。 だから、それ以上の騒ぎなしに、プロジェクトを始めましょう!
Arduino Pick and Place Robot Video Tutorial
まず、Pick and Place Robotのビデオを撮影しました。
最初に私がこの一突きおよび場所のロボットを造るのに使用した部品についての少しを言うことを許可しなさい。
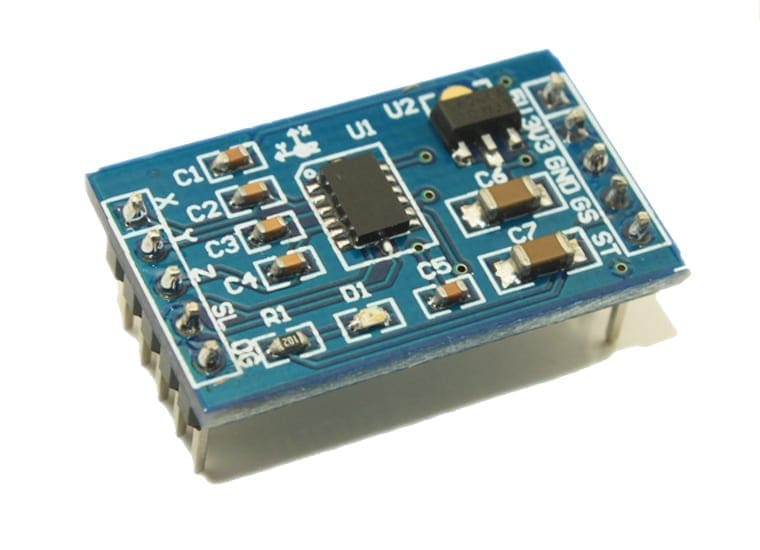
加速度計は、物体に作用する様々な軸上の重力による加速度を感知するために使用することができるセンサである。 これを使用して、我々は簡単に地面に対する物体の傾きを計算することができます。 私たちは、XとYチルトアナログ値を使用して私たちのスピネルの核心を駆動します。
ここでは、ジェスチャー制御ロボットの方向を制御するためにMMA7361加速度計を使用しています。X方向とY方向にアナログ値を与える任意の加速度計を 私がこの加速度計を使用している理由は、この加速度計にVccとして5vと3.3vを提供できるからです。 私はArduino MKR1000を使用しているので、Arduinoから直接3.3ボルトを接続できます。 また、非常に軽量で小さく、簡単に多くの合併症なしにArduinoとRaspberry Piに接続することができます。 あなたがしたい場合は、から安い価格でこの加速度計を購入することができますbanggood.com.
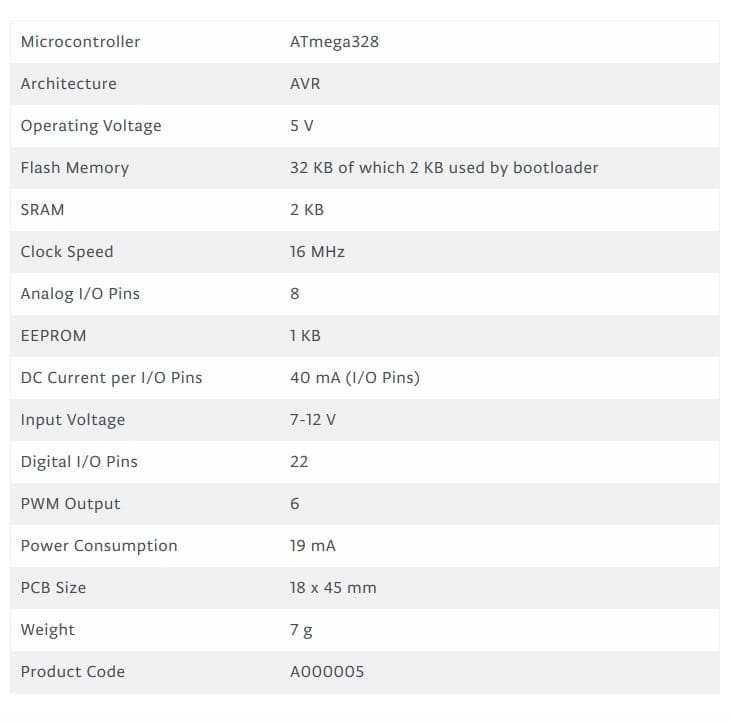
Arduino Nano
このプロジェクトでは、すべてのセンサーデータを収集して無線モジュールに送信するコントローラと、受信機モジュールからデータを収集して処理し、ロ Arduino Nanoは非常に小さく、パンボードの上に簡単に取り付けることができます。 これはArduino IDEを使用してUSB経由でPCを使用して簡単にプログラムすることができます
このボードは、ミニUSBポートを使用して給電することができます。 ピン30を通して、私達は20Vに6の調節されていない電圧源を供給してもいいですまたはピン27を通して、私達は5V.the力の選択の調整された動力源
Arduinoを学ぶ簡単な方法
Arduinoを初めて使用しますか? あなたはArduinoのプログラミングであなたのスキルを向上させたいですか? あなたは正しい場所にいます。 私たちは、ゼロからすべてをカバーするArduinoのための完全な初心者レベルのチュートリアルを持っています。 初心者ガイドのためのこの無料のArduinoチュートリアルでは、Arduinoプラットフォームの紹介、Arduino IDEの入門、さまざまな種類のArduinoボード、Arduinoを使用した多くのDIYプロジェ それをチェックアウト!
Arduinoの学習を始めましょう
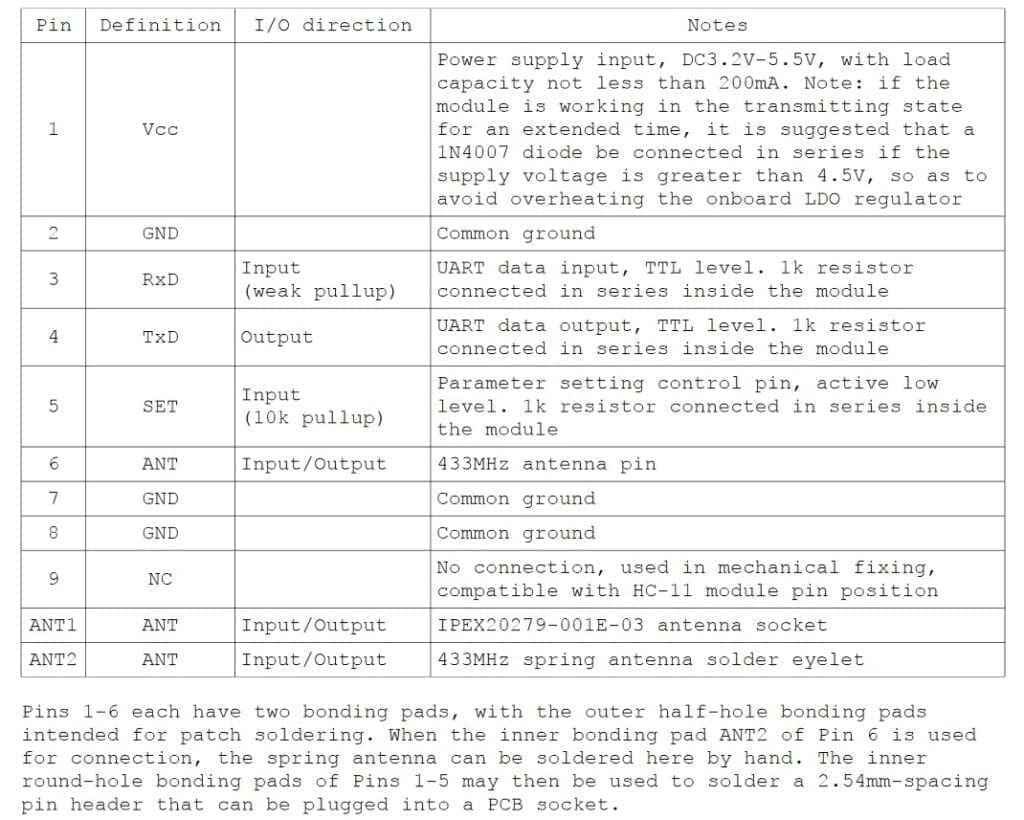
HC12
HC12は、最大1.7KMの長距離の無線シリアル通信に使用できる、本当に安価な長距離無線モジュールです。 モジュールはこれに私達のプロジェクトのための最もよい無線コントローラーをする実際に密集した軽量およびbreadboard友好的である。

ピン配置
HC12接続のテスト
#include <SoftwareSerial.h>SoftwareSerial HC12(10, 11); // HC-12 TX Pin, HC-12 RX Pinvoid setup() {Serial.begin(9600); // Serial port to computerHC12.begin(9600); // Serial port to HC12}void loop() {while (HC12.available()) { // If HC-12 has dataSerial.write(HC12.read()); // Send the data to Serial monitor}while (Serial.available()) { // If Serial monitor has dataHC12.write(Serial.read()); // Send that data to HC-12}}
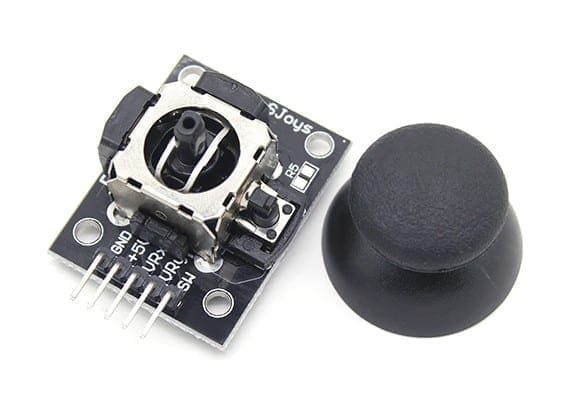
Joystick
arduinoで動作するように構築された様々なロボットDIYロボットキット/ロボットアームキットが付属している最も広く使用されているロボットコント デザインは非常にシンプルで、非常に使いやすいです。 それはx軸の動きを計算するのに2つの電位差計をおよびy軸およびボタンの出版物を感じるためにスイッチ使用します。
arduinoのアナログピンに簡単に接続し、アナログ値を直接読み取ることができます。
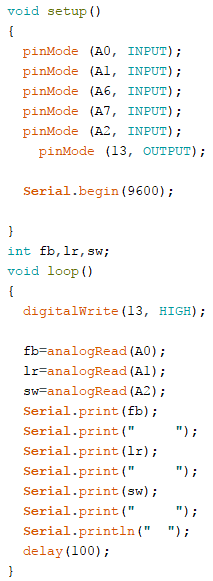
ダウンロード
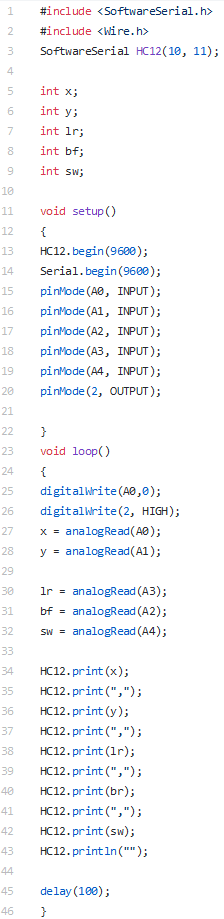
メインコードをアップロードする前に、このコードを使用してジョイスティックが動作することを確認してください。 上記のリンクからコードをダウンロードしてください。 この例では、我々がやっていることは、単にarduinoのアナログピン(A0、A1、A2)を使用してジョイスティックからのデータアナログ出力を収集しています。 これらの値は変数に格納され、後でシリアルモニタに出力されます。
この記事を二つの部分に分けます
1-Pick and Place Robot Remote Controller
送信機は、すべてのセンサーとコンポーネントをマウントして、pick and place robotとロボットアームを駆動するために使用されるデータを取得するブレッドボードで構成されています。 これには、加速度計、ジョイスティック、およびHC12モジュールが含まれます。
加速度計を使ってロボットアームを制御し、ジョイスティックを使ってロボットを制御します。 今のところ、我々はロボットの手を閉じるためにジョイスティックボタンを使用します。 このセンサーからのデータはHC12モジュールを使用してDIYのロボットに無線で送信される。
2-ピックアンドプレイスロボット
ここでは、ロボットアームの作り方、ロボットを構築し、ロボットの上に腕を取り付ける方法を教えてくれます。 また、無線通信モジュール–HC12からのデータを読み取り、それを処理するためにArduinoをプログラムする方法と、ロボットと一緒にArduinoでロボットアームをリモー
DIYロボット工学を学ぶことはとても簡単ではありませんでした!
DIYロボットは、あなたが適切なガイドを持っている場合は、ほんの数分で学ぶことができる楽しさと簡単なことです。 あなたはロボット工学を学びたいが、どこから始めるべきか分からないのですか? これはあなたのためです。 ここでは、私たちはあなたが簡単に従う、100%無料、ロボット工学の基礎、ロボットの部分から始まるステップバイステップの指示でDIYロボット工学を始 ここでは、初心者から上級者までのロボット工学プロジェクトのチュートリアルの素晴らしいコレクションを見つけることができます。
ロボットの学習を始める
パート1–リモコン
前述のように、このDIYロボットは遠隔制御ロボットです。 コントローラセクションにはブレッドボードとジョイスティックがありますロボットの動きとロボットの拳の開閉を制御する加速度計ロボットアームを動かす無線モジュールこのデータをロボットに送信するためのものです
以下に示すように、すべてのコンポーネントを接続するだけです。 私たちは5V電源バンクでArduinoに電力を供給し、arduinoの5V Voutを使用して他のすべてのモジュールに電力を供給します。
リモコンPCB
以前のビデオでは、ブレッドボード加速度計、ボタン、およびHC12ワイヤレスモジュールを使用して、RCロボット用のこのワイヤレスリモートコントローラを作る方法を示しました。 まだ見ていない場合は、まず下のビデオを参照してください。 このロボットを制御するためにそのリモコンを使用するからです。
基本的にこのリモコンは、加速度計のボタンなどのセンサーからアナログとデジタルのデータを読み取り、別々の変数に格納します。 これらの変数は単一の長いひもを形作るために一緒に結合され、このひもはHC12無線モジュールを使用して私達のロボットに送られます。
Altium
を使用した回路図の描画とPCB設計Altium Designerを使用して回路を描画し、PCBを設計しました。 あなたのプロジェクトのためのあなた自身のPCBs、また産業使用のための複雑な、多人数参加型PCBsを設計し、作成するのに使用することができるのは ここにAltium試用版へのリンクがあります。 だから、あなたがそれをチェックアウトしていることを確認してください。回路
回路
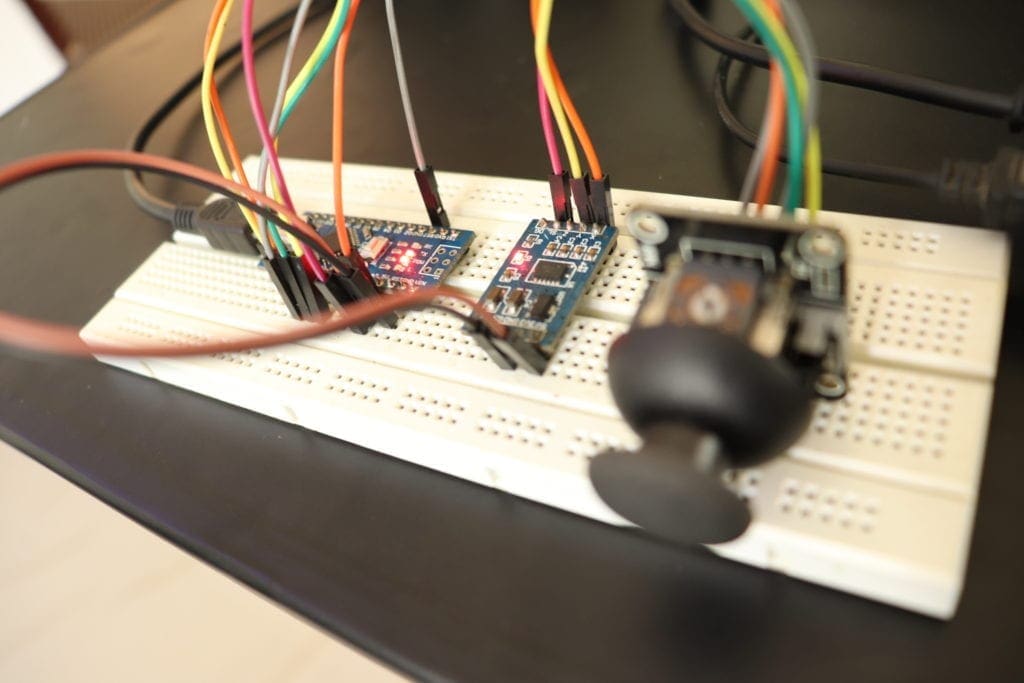
すべての部品を含む回路を作りました: ジョイスティック、加速度計、arduino nano、hc12モジュールはarduinoのGPIOピンに接続され、ブレッドボードに組み立てられました。

それは完璧に働いたが、問題は、ボード全体があちこちに行くすべてのジャンパー線と本当に乱雑に見えた、でした。 だから私はPCBと一緒に行くことにしました。
PCBバージョンでは、次のプロジェクトで使用する4つのスイッチを追加しました。
また、7805レギュレータを追加し、7Vと35Vの間の入力電圧を提供して、5V USB電源、9Vバッテリー、または12V Lipoバッテリーを問題なく使用できるようにしました。 私はまた、何かが動作を停止した場合、私に知らせるいくつかのインジケータLedを追加しました。 あなたは下のリンクに回路を見つけるでしょう。
PCBレイアウト
Altium PCB designerを使用してPCBレイアウトを作成することもできます。 これは私が回路を使って作ったレイアウトです。 あなたが見ることができるように、これは二重層PCBであり、ルーティングは両側にあることを意味します-上側と下側にあります。

ボードの左側に私は今、私は私と一緒にガーバーファイルを持っている私の電池を維持するためにいくつかの空きスペースを残しました。 私がしなければならなかったのは、PCBを注文することだけです。
すべての部品を手に入れたら、それらをすべて一緒にはんだ付けし、これが私の最終的なPCBです。 すべてのコンポーネントがボードに接続されていることがわかります。
int x;int y;int lr;int bf;int sw;void setup(){ Serial.begin(9600);pinMode(A0, INPUT);pinMode(A1, INPUT);pinMode(A2, INPUT);pinMode(A3, INPUT);pinMode(A4, INPUT);pinMode(2, OUTPUT);}void loop(){digitalWrite(A0,0);digitalWrite(2, HIGH);x = analogRead(A0);y = analogRead(A1);lr = analogRead(A2);bf = analogRead(A3);sw = analogRead(A4);Serial.print("Accelerometer");Serial.print("X = ");Serial.println(x);Serial.print("Y = ");Serial.println(y);Serial.println("");Serial.print("Joy Stick");Serial.println("");Serial.print("Left/Right = ");Serial.println(lr);Serial.print("Back/Forward = ");Serial.println(bf);Serial.print("Switch = ");Serial.println(sw);Serial.println("");Serial.println("");delay(250);}
このコードがアップロードされたら、シリアルモニタを起動し、これらの値がすべて正しく表示されているかどうかを確認します。
次に、以下の実際のコードをアップロードすることができます。コード
コード
以下のダウンロードリンクを使用して以下のコードをダウンロードし、コントローラにアップロードします。
ダウンロード
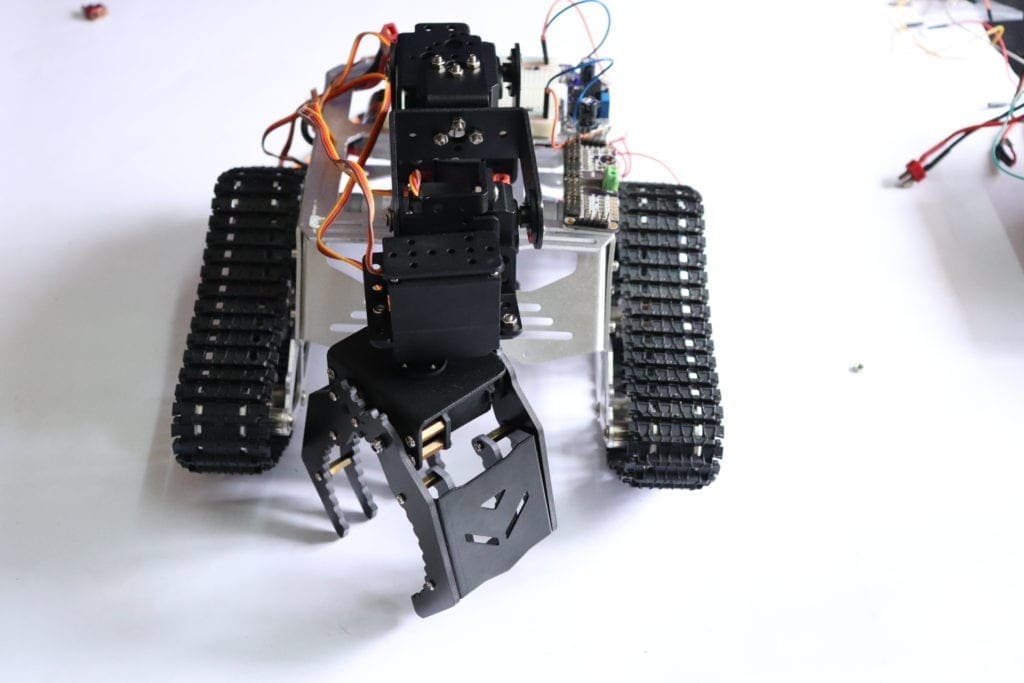
パート2-ロボット
ロボットの主要部分は、アームを含むすべてのコンポーネントをマウントするシャーシです。
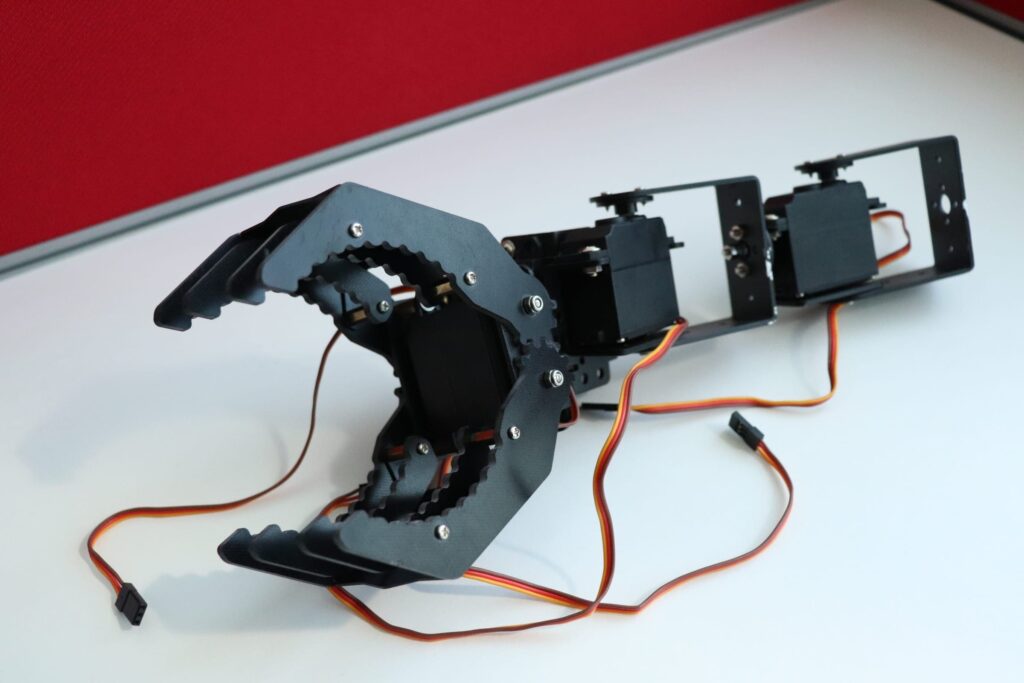
私はからロボットアームキットを得ましたbanggood.com….. このロボットアームは良質のアルミニウムで作られており、本当に軽量です。 これは私たちが取り付け穴を掘削することなく、任意のロボットボディ/シャーシに接続することができますので、多くの取付点を持っています。
それをチェックするにはここをクリック
ロボットアームに合計3自由度を与える4つのサーボモータがあります。 サーボモータが付属しており、動作電圧は4.8-6Vです。
サーボモータと一緒に購入するか、別々に購入することができます。
このピックアンドプレースロボットを作るために使用したシャーシは、私が話したいことです。 私はこのキットを手に入れましたbanggood.com。これだけでなく、Arduino、raspberry pi、その他の電子機器や趣味のプロジェクトを行うためのロボットフレーム、モーター、ほぼすべてのセンサーがあります。 あなたは本当に速いと品質の出荷と安い価格のためにこれらすべてのものを取得します。
そして、このキットの素晴らしいところは、彼らはあなたが一緒にフレームを組み立てるために必要なすべてのツールを提供しています。
BANGGOODからDIYロボットキットを入手
ここをクリックしてチェックしてください!!
サーボモータ制御
PCA9685は、16チャンネル12ビットPWM I2cバス制御サーボモータドライバです。 運転者はあなたのarduino、ラズベリーパイに非常に容易に接続され、単一か多数のサーボモーターを制御し、あなた自身のRCの平面、車、船、quadrapod、hexapodまたはあなたがほしい何でも
サーボモータドライバの詳細については、このリンクに従ってください。
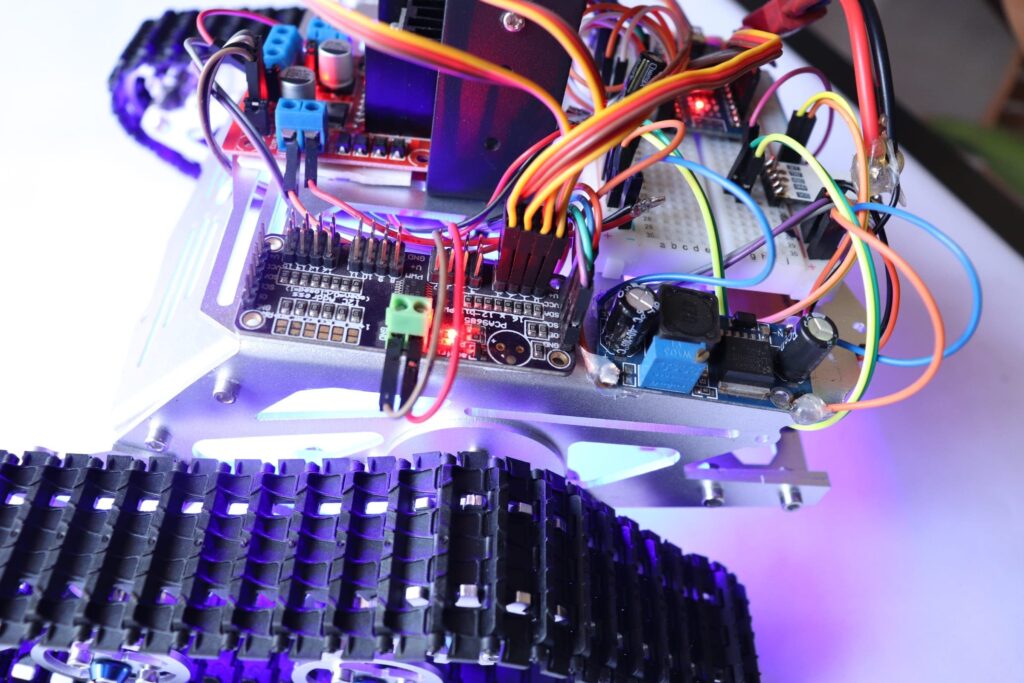
Pick and Place Robot–Connections
ここでは、ロボット全体の電源を供給するために12V電源を使用します。 私達はモーターのためのLEDおよびモーター運転者ICの電圧に未加工12ボルトに与えます。
その後、レギュレータを使用して電圧を5Vに降圧し、Arduino、HC12、サーボモータドライバに供給します。
良いモータドライバICを使用してDCモータを駆動することができます。 このプロジェクトでは、一度に二つのサーボモータを制御できるデュアルHブリッジモータドライバIC–L293Dを使用します。
L293D ICを使用したDCモータの駆動の詳細はこちらをクリックしてください。 あなたがこれに慣れていない場合は、プロジェクトのより良い理解を得るために次のステップに進む前に、これを通過することをお勧めします。
以下に示すように、すべてのコンポーネントを接続するだけです。
私たちは、5Vの電源バンクでArduinoに電源を供給し、他のすべてのモジュールに電源を入れるためにarduinoの5V Voutを使用します。
Arduino – Servo motor Driver
- 5 Vout – VCC Arduino
- Gnd – Gnd
- SDA – SDA
- SCL – SCL
Arduino – HC12
- 5 Vout – VCC Arduino
- Gnd – Gnd
- 10 – TX
- 11 – Rx
Servo motor Driver – Servo Motor
- Servo 1 – Port 000
- Servo 2 – Port 001
- Servo 3 – Port 002
- Servo 4 – Port 003
Arduino – L293D
- Pin 2 – Motor 1 A
- Pin 3 – Motor 1 B
- Pin4-Motor2A
- Pin5–Motor2B
L293D
Hブリッジは、イネーブル端子がロジック1
に設定されている場合にのみ動作しますこのICを使用している間に心に留めておくべきことの一つは、入力電力を供給する必要がある二つのピンがあることです。 ピン8とピン16は、どちらも全く異なる目的のためのものです。 ピン9は6Vから30ボルトの電圧を扱うことができるモーターおよび内部回路のためのICに動力を与えるピン16を運転するためです。 いかなる状況下でも、これら二つのピンを交換しないでくださいまたはそれがチップをオフに焼損することがあります。
コード
以下のダウンロードリンクを使用して以下のコードをダウンロードし、DIYロボットにアップロードするだけで、あなたは行ってもいいでしょう。

ダウンロード
ライド!!!
コードがpick and placeロボットにアップロードされると、ロボットを12V電源に接続し、ロボットのワイヤレスコントローラを5V電源に接続することができます。
今、あなたは無線コントローラを使用してリモートでロボットを制御することができるはずです。
これはほんの始まりです。 私たちRootSaidグループは、ロボットアームを含むロボット全体を制御するために使用できる無線制御手袋に取り組んでいます。 しかし、この手袋には何かクールなものがあります。
この手袋は、フレックスセンサーなしで手のジェスチャーを検出することができます。 はい、あなたはその権利を聞いた。 詳細を知りたいですか? RootSaidの一部になります。
RootSaidウェブサイトを購読するには、以下のメールアドレスIDを入力するだけです。 あなたがいじくり回すためのチュートリアルが利用可能であるときはいつでも、あなたは通知を受信します。