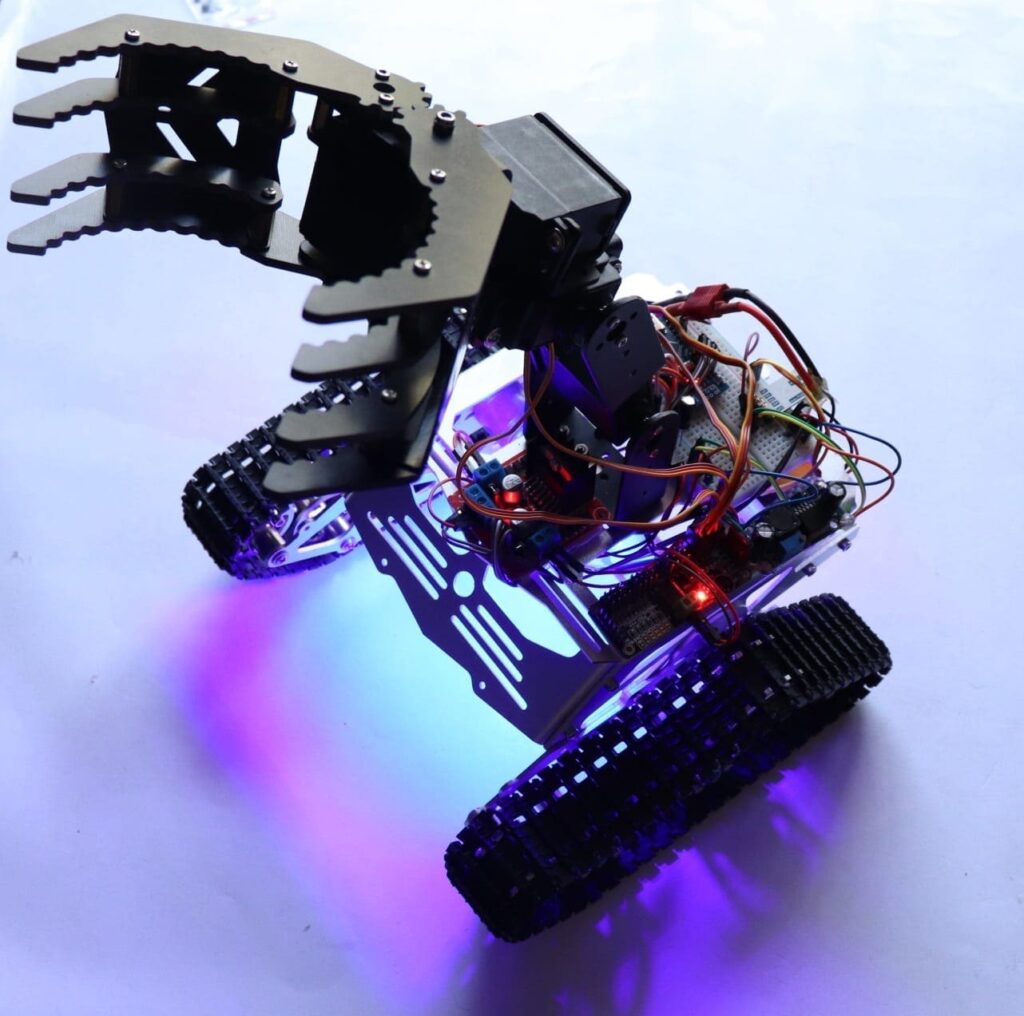
Spero che tu abbia passato attraverso l’introduzione di Spinello Crux L2 – Arduino Pick and Place Robot con Braccio Robotico. Sembra freddo sotto le luci incandescenti giusto? Perché non costruirne uno per te? Qui impareremo come costruire un robot e collegare un braccio robotico su di esso e costruire il nostro robot fai da te pick and place.
Vi forniremo con il disegno, codice, schemi elettrici, e link per acquistare il proprio braccio robotico, kit robot, chassis e moduli sensore utilizzati in questo progetto.
Prova a crearne uno tu stesso e se sei bloccato con il progetto, puoi sempre contattarci o porre le tue domande nella casella dei commenti o nel nostro gruppo WhatsApp. Quindi, senza ulteriori indugi, lasciate iniziare con il progetto!
Arduino Pick and Place Robot Video Tutorial
Prima prendere il video del Pick and Place Robot che abbiamo fatto.
Per prima cosa lascia che ti dica un po ‘ dei componenti che ho usato per costruire questo robot pick and place.
Arduino Pick and Place Robot componenti necessari
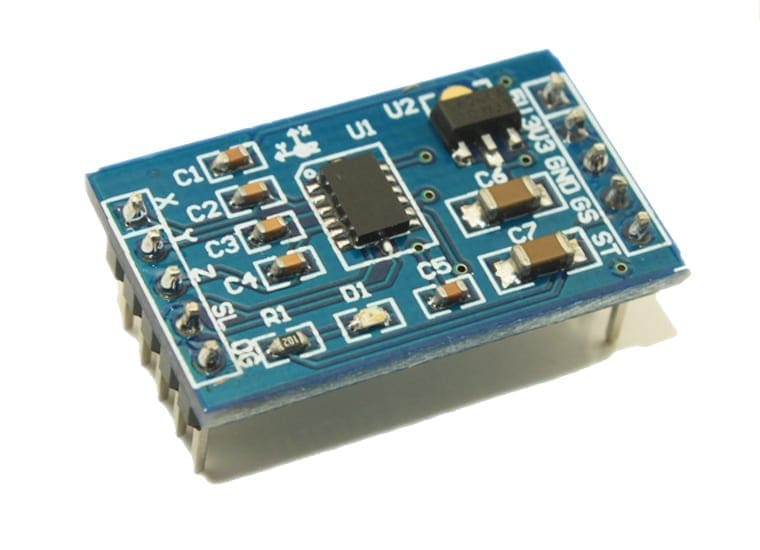
Un accelerometro è un sensore che può essere utilizzato per rilevare l’accelerazione dovuta alla gravità su vari assi che agiscono su un oggetto. Usando questo possiamo facilmente calcolare l’inclinazione di un oggetto rispetto al terreno. Guideremo il nostro Spinello Crux usando i valori analogici di inclinazione X e Y.
Qui sto usando l’accelerometro MMA7361 per controllare la direzione del nostro robot controllato dal gesto; puoi usare qualsiasi accelerometro che darà valori analogici in direzione X e Y. Il motivo per cui sto usando questo accelerometro è che possiamo fornire 5 volt e 3,3 volt come Vcc a questo accelerometro. dal momento che sto usando Arduino MKR1000, posso collegare 3.3 Volt direttamente da Arduino. È anche piccolo molto leggero e può essere facilmente collegato ad Arduino e Raspberry Pi senza troppe complicazioni. se si desidera, è possibile acquistare questo accelerometro per un prezzo basso da banggood.com.
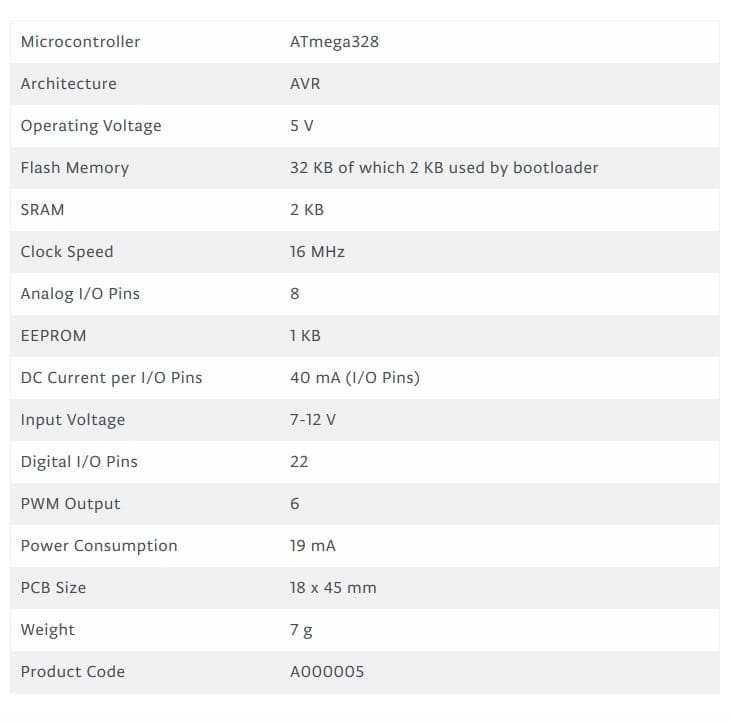
Arduino Nano
In questo progetto, si dovranno utilizzare due micorcontroller – uno per il controller, che raccoglie tutti i dati del sensore, e li trasmette al modulo wireless e un altro sul robot, che raccoglie i dati dal modulo ricevitore, la loro elaborazione e controllo del braccio robotico per il pick-and-place robot. Il Arduino Nano è molto piccolo e può essere facilmente montato sulla parte superiore del bordo di pane. Questo può essere facilmente programmato utilizzando un PC tramite USB utilizzando Arduino IDE
Questa scheda può essere alimentata utilizzando la porta Mini USB. Attraverso il pin 30, possiamo fornire una fonte di tensione non regolamentata da 6 a 20 V o tramite il pin 27, possiamo fornire una fonte di alimentazione regolata di 5 V. La selezione della potenza verrà eseguita automaticamente dalla scheda Nano.
Imparare Arduino il modo più semplice
Sei nuovo di Arduino? Vuoi migliorare le tue abilità nella programmazione Arduino? Sei nel posto giusto. Abbiamo un tutorial completo per principianti per Arduino che copre tutto da zero. In questo tutorial gratuito Arduino per principianti, daremo un’occhiata all’Introduzione alla piattaforma Arduino, iniziare con Arduino IDE, diversi tipi di schede Arduino e molti progetti fai-da-te che utilizzano Arduino. Guarda qua!
Consente di iniziare a imparare Arduino
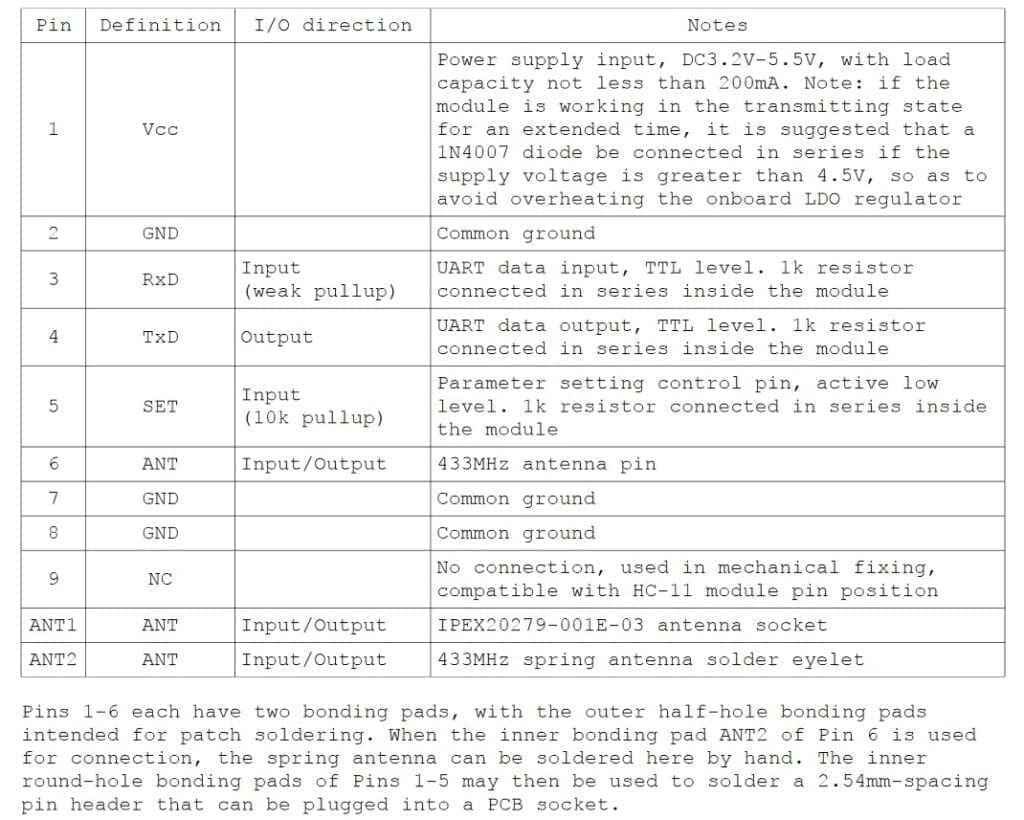
HC12
HC 12 è davvero a buon mercato a lungo raggio, il modulo wireless che può essere utilizzato per la comunicazione seriale senza fili su una lunga distanza fino a 1,7 KM. Il modulo è davvero compatto leggero e breadboard-friendly che rende questo il miglior controller wireless per il nostro progetto.

Pinout
il Test di Connessione HC12
#include <SoftwareSerial.h>SoftwareSerial HC12(10, 11); // HC-12 TX Pin, HC-12 RX Pinvoid setup() {Serial.begin(9600); // Serial port to computerHC12.begin(9600); // Serial port to HC12}void loop() {while (HC12.available()) { // If HC-12 has dataSerial.write(HC12.read()); // Send the data to Serial monitor}while (Serial.available()) { // If Serial monitor has dataHC12.write(Serial.read()); // Send that data to HC-12}}
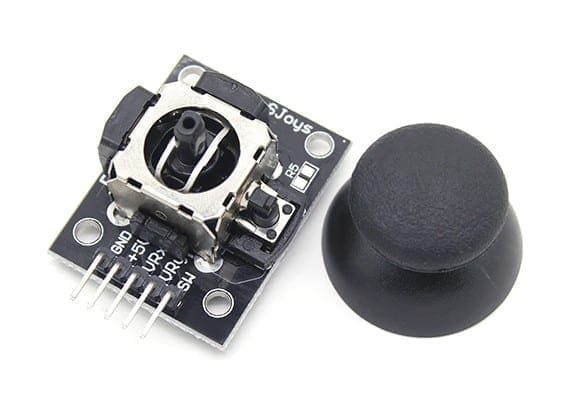
Joystick
Questo è il più ampiamente utilizzato robotica controller che viene fornito con i vari robot robot fai da te kit/robot kit braccio che è costruito per funzionare con arduino. Il design è abbastanza semplice ed è molto facile da usare. Utilizza due potenziometri per calcolare il movimento nell’asse x e nell’asse y e un interruttore per rilevare la pressione del pulsante.
Questo può essere facilmente collegato ai pin analogici di arduino e leggere direttamente i valori analogici.
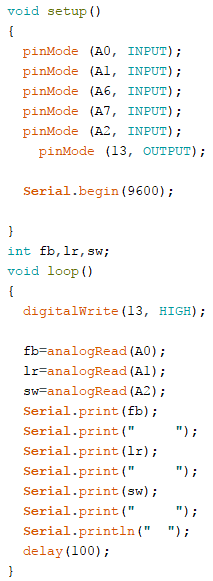
Scarica
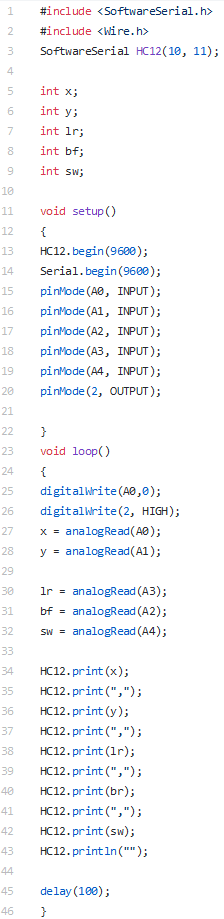
Prima di caricare il codice principale, assicurati che il tuo joystick funzioni utilizzando questo codice. Scarica il codice dal link qui sopra. In questo esempio, quello che stiamo facendo è semplicemente raccogliere i dati uscite analogiche dal Joystick utilizzando i pin analogici (A0, A1,A2) di arduino. Questi valori sono memorizzati nelle variabili e vengono successivamente stampati sul monitor seriale.
Divideremo questo post in due parti
1 – Pick and Place Robot Remote Controller
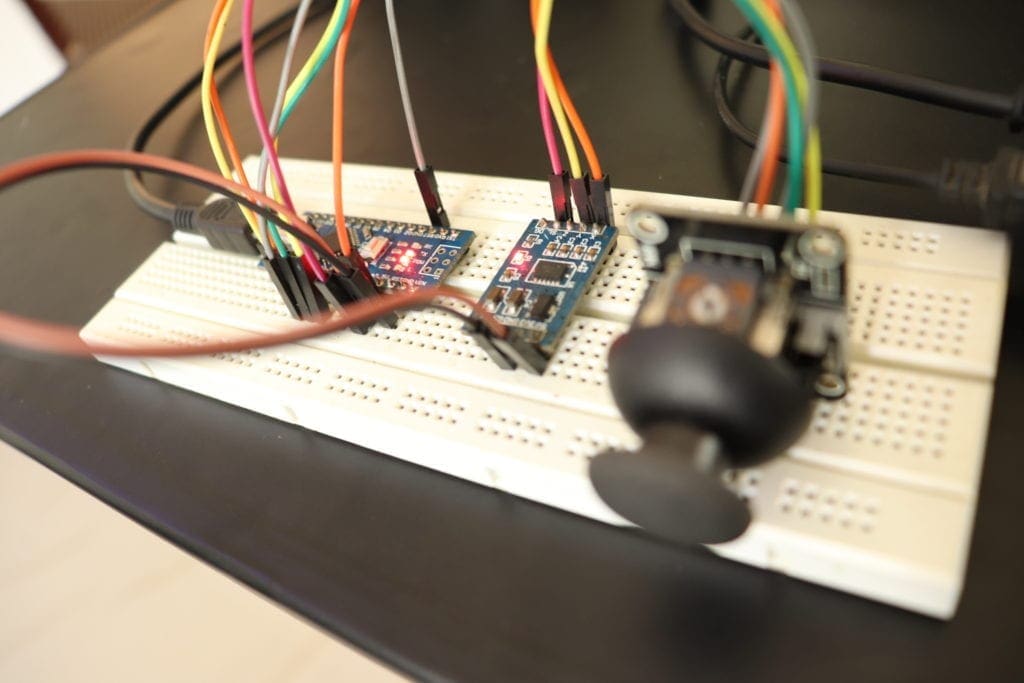
Il trasmettitore è costituito da una breadboard in cui montiamo tutti i sensori e componenti per ottenere i dati che vengono utilizzati per guidare il pick and place robot e il braccio robotico. Questo include un accelerometro, un joystick e un modulo HC12.
Useremo l’accelerometro per controllare il braccio robotico e il joystick per controllare il robot. Per ora, useremo il pulsante del joystick per chiudere la mano robotica. I dati di questi sensori vengono trasmessi in modalità wireless al robot fai-da-te utilizzando un modulo HC12.
2 – Il robot Pick and Place
Qui, ti dirò come creare un braccio robotico, costruire un robot e montare il braccio sopra il robot. Imparerai anche come programmare Arduino per leggere i dati provenienti dal modulo di comunicazione wireless – HC12, elaborarlo e come controllare a distanza il braccio robotico con Arduino insieme al robot.
Imparare la robotica fai da te non è mai stato così facile!
La robotica fai da te è una cosa facile e divertente che puoi imparare in pochi minuti se hai una guida adeguata. Vuoi imparare la robotica, ma non sai da dove cominciare? Allora QUESTO è per te. Qui, vi aiuteremo a iniziare con la robotica fai da te con facile da seguire, 100% GRATUITO, istruzioni passo-passo a partire da nozioni di base di robotica, parti di Robot, e poi inizieremo completo tutorial passo-passo. Qui troverai anche una fantastica collezione di tutorial sul progetto di robotica dal livello principiante all’avanzato per iniziare con la robotica fai-da-te.
Inizia ad imparare Robotica
Parte 1 – Il telecomando
Come accennato in precedenza, questo robot fai da te è un robot controllato a distanza. Quindi, nella sezione controller, abbiamo una breadboard, un joystick-per controllare il movimento del robot e la chiusura e l’apertura del pugno del robot, un accelerometro – per spostare il braccio robotico e un modulo wireless per trasmettere questi dati al robot.
Connessioni
Basta collegare tutti i componenti come mostrato di seguito. Saremo alimentando il Arduino con un 5 V banca di potere e utilizzare il 5 V Vout del arduino per alimentare tutti gli altri moduli.
Il telecomando PCB
Nel mio video precedente, ho mostrato come si effettua questo telecomando senza fili per il vostro Robot RC utilizzando un accelerometro breadboard, pulsanti, e un modulo wireless HC12. Se non l’hai ancora visto, guarda prima il video qui sotto. Perché useremo quel telecomando per controllare questo robot.
Fondamentalmente ciò che questo telecomando fa è, legge dati analogici e digitali da sensori come pulsanti accelerometro joystick e memorizzarli in variabili separate. Queste variabili saranno combinate insieme per formare una singola stringa lunga e questa stringa verrà inviata al nostro robot utilizzando il modulo wireless HC12.
Disegno schemi e progettazione PCB utilizzando Altium
Così ho usato Altium Designer per disegnare il circuito e progettare il PCB. Si tratta di un potente strumento che può essere utilizzato per progettare e creare i propri PCB per il vostro progetto così come PCB complessi e multiplayer per uso industriale. Ecco il link alla versione di prova di Altium. Quindi assicuratevi di controllare fuori.
Circuito
Ho realizzato un circuito che includeva tutti i componenti: il joystick, accelerometro, arduino nano e hc12 modulo collegato al pin GPIO di arduino e assemblato su una breadboard.

Ha funzionato perfettamente ma il problema era che l’intera scheda sembrava davvero disordinata con tutti i ponticelli che andavano qua e là. Così ho deciso di andare con PCB.
Nella versione PCB, ho aggiunto 4 switch che utilizzerò per il prossimo progetto.
Ho anche aggiunto un regolatore 7805 che mi aiuterà a fornire una tensione di ingresso tra 7V e 35V in modo da poter utilizzare un alimentatore USB da 5V, una batteria da 9V o anche una batteria Lipo da 12 V senza problemi. Ho anche aggiunto alcuni LED indicatori che mi faranno sapere se qualcosa ha smesso di funzionare. Troverete il circuito nel link sottostante.
Layout PCB
Altium PCB designer può anche essere utilizzato per realizzare layout PCB. Questo è il layout che ho fatto usando il circuito. Come puoi vedere questo è un PCB a doppio strato, il che significa che il routing è lì su entrambi i lati – il lato superiore e il lato inferiore.

Sul lato sinistro della scheda ho lasciato un po ‘ di spazio vuoto per mantenere le mie batterie Ora ho il file Gerber con me. Tutto quello che dovevo fare era ordinare il PCB.
Una volta ottenuti tutti i componenti, li ho saldati tutti insieme e questo è il mio PCB finale. Vedi, tutti i componenti sono collegati alla scheda ora.
int x;int y;int lr;int bf;int sw;void setup(){ Serial.begin(9600);pinMode(A0, INPUT);pinMode(A1, INPUT);pinMode(A2, INPUT);pinMode(A3, INPUT);pinMode(A4, INPUT);pinMode(2, OUTPUT);}void loop(){digitalWrite(A0,0);digitalWrite(2, HIGH);x = analogRead(A0);y = analogRead(A1);lr = analogRead(A2);bf = analogRead(A3);sw = analogRead(A4);Serial.print("Accelerometer");Serial.print("X = ");Serial.println(x);Serial.print("Y = ");Serial.println(y);Serial.println("");Serial.print("Joy Stick");Serial.println("");Serial.print("Left/Right = ");Serial.println(lr);Serial.print("Back/Forward = ");Serial.println(bf);Serial.print("Switch = ");Serial.println(sw);Serial.println("");Serial.println("");delay(250);}
Una volta caricato questo codice, avviare il monitor seriale e verificare se tutti questi valori sono mostrati correttamente.
Quindi è possibile caricare il codice reale qui sotto.
Codice
Basta scaricare il codice sottostante utilizzando il link per il download qui sotto e caricarlo sul controller.
Download
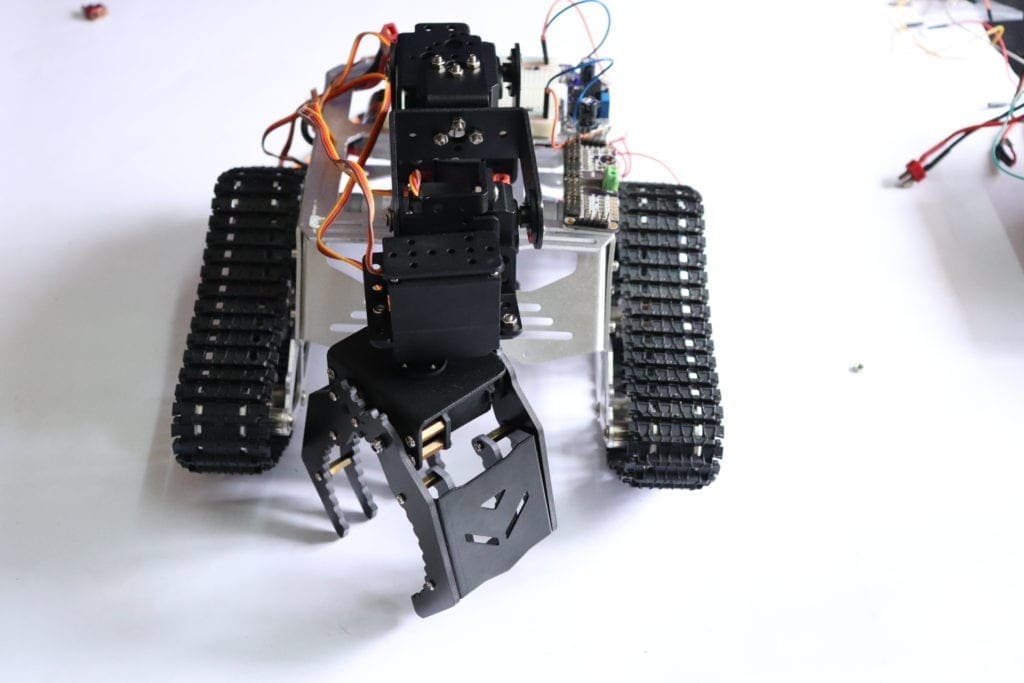
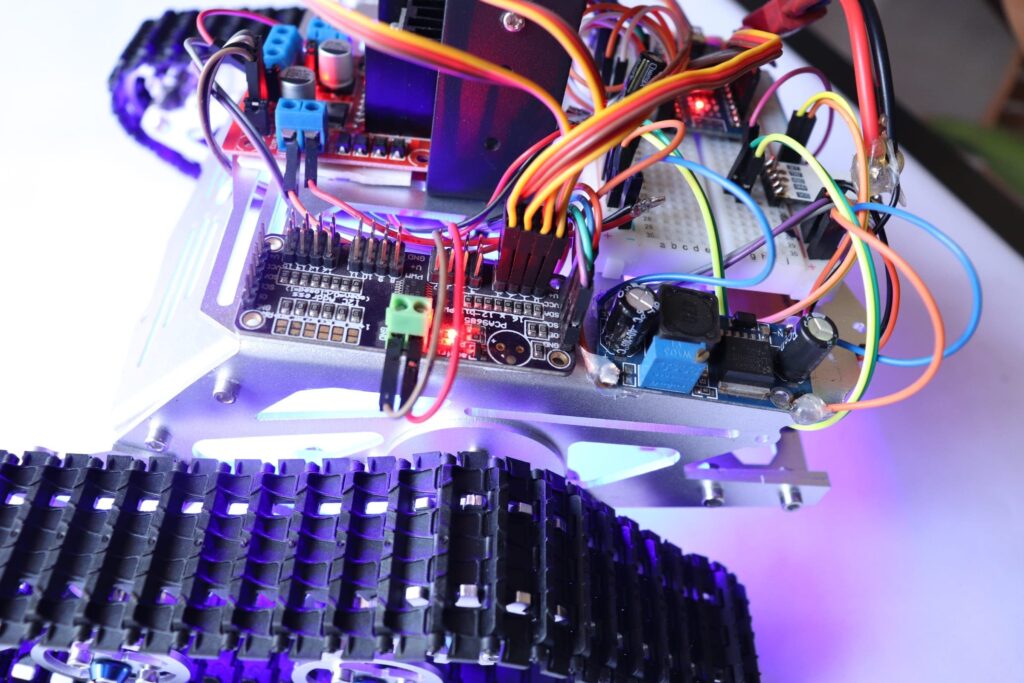
Parte 2-Il Robot
La parte principale del robot è il telaio in cui montiamo tutti i componenti compreso il braccio.
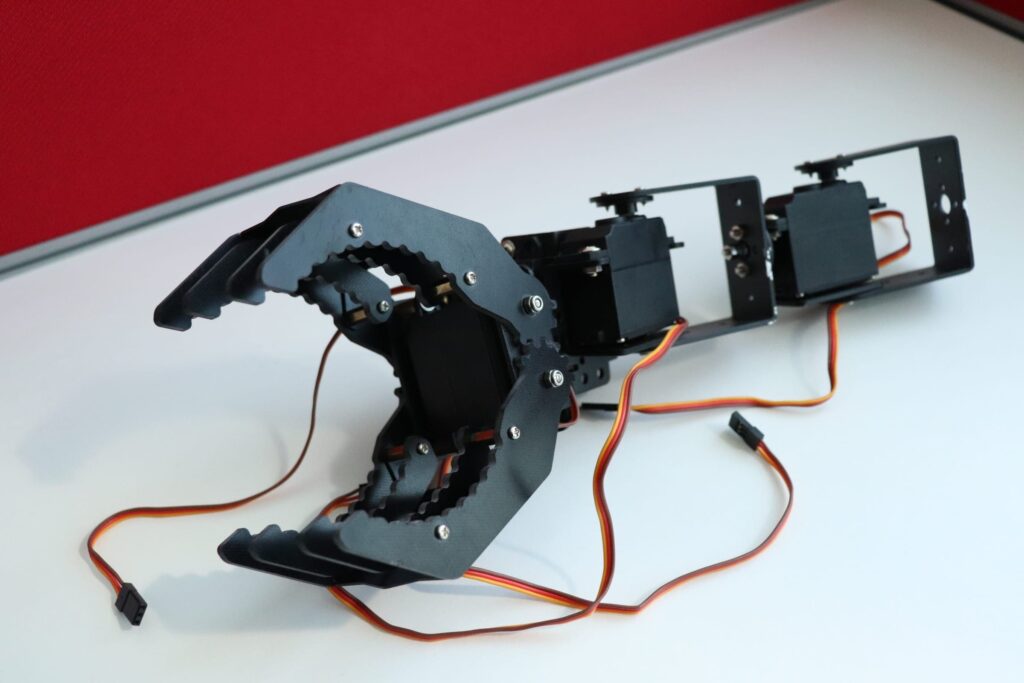
Ho ottenuto il kit braccio robotico da banggood.com. Questo braccio robotico è realizzato in alluminio di buona qualità ed è davvero leggero. Questo ha così tanti punti di montaggio che ci permetteranno di connetterci a qualsiasi corpo/telaio del robot senza praticare fori di montaggio.
Clicca qui per verificarlo
Ci sono 4 servomotori che daranno al braccio robotico un totale di 3 gradi di libertà. I servomotori sono inclusi e la tensione di funzionamento è 4.8-6V.
È possibile acquistare questo insieme con il servomotore o si possono acquistare separatamente.
Il telaio che ho usato per realizzare questo robot pick and place è qualcosa di cui vorrei parlare. Ho preso questo kit banggood.com. Non solo questo, hanno così tanti tipi di telai robot, motori e quasi tutti i sensori per fare Arduino, raspberry pi e altri progetti di elettronica e hobby. Otterrete tutte queste cose per un prezzo economico con spedizione veramente veloce e di qualità.
E la cosa grandiosa di questo kit è che forniscono tutti gli strumenti necessari per assemblare il telaio insieme.
Ottieni il tuo kit robot fai da te da BangGood
Clicca qui per controllarlo!!
Servomotore di controllo
Il PCA9685 è un 16 canali 12 bit PWM I2C-bus controllato Servo driver del motore. Il driver può molto facilmente collegato al vostro arduino, torta di lamponi e facilmente programmato per controllare singolo o più servomotori e rendere il vostro proprio aereo RC, auto, nave, quadrapod, hexapod o tutto quello che vuoi.
Segui questo link per saperne di più sul driver del servomotore.
Pick and Place Robot – Connections
Qui useremo un alimentatore da 12 V per alimentare l’intero robot. Alimentiamo i 12 Volt grezzi al LED e alla tensione IC del driver del motore per il motore.
Quindi usiamo un regolatore per abbassare la tensione a 5V e alimentarlo ad Arduino, HC12 e al driver del servomotore.
È possibile guidare i motori DC utilizzando un buon driver del motore IC. In questo progetto, userò Dual H Bridge Motor Driver IC-L293D che può controllare due servomotori alla volta.
Per maggiori dettagli sulla guida di motori DC utilizzando L293D IC clicca qui. Se siete nuovi a questo, è meglio passare attraverso questo prima di procedere al passo successivo per ottenere una migliore comprensione del progetto.
Basta collegare tutti i componenti come mostrato di seguito.
Saremo alimentando il Arduino con un 5 V banca di potere e utilizzare il 5 V Vout di arduino per accendere tutti gli altri moduli.
Arduino – Servo motor Driver
- 5 Vout – VCC Arduino
- Gnd – Gnd
- SDA – SDA
- SCL – SCL
Arduino – HC12
- 5 Vout – VCC Arduino
- Gnd – Gnd
- 10 – TX
- 11 – Rx
Servo motor Driver – Servo Motor
- Servo 1 – Port 000
- Servo 2 – Port 001
- Servo 3 – Port 002
- Servo 4 – Port 003
Arduino – L293D
- Pin 2 – Motor 1 A
- Pin 3 – Motor 1 B
- Pin 4-Motore 2 A
- Pin 5-Motore 2 B
L293D
Il ponte H funzionerà solo se il Pin di abilitazione è impostato su Logic 1
Una cosa da tenere a mente durante l’utilizzo di questo IC è che ci sono due pin in cui dobbiamo fornire l’alimentazione in ingresso. Pin 8 e Pin 16; entrambi sono per scopi completamente diversi. Pin 9 è per la guida del motore in grado di gestire una tensione di 6 V a 30 Volt e Pin 16 che si accende il IC per il circuito interno. In nessun caso, non dovresti scambiare questi due pin o potrebbe bruciare il chip.
Codice
Basta scaricare il codice qui sotto utilizzando il link per il download qui sotto e caricarlo a voi robot fai da te e sarete a posto.

Scarica
Lets Ride!!!
Una volta che il codice viene caricato sul robot pick and place, è possibile collegare il robot a una fonte di alimentazione a 12 V e il controller wireless del robot a una fonte di alimentazione a 5 V.
Ora si dovrebbe essere in grado di controllare il robot da remoto utilizzando il controller wireless.
Questo è solo un inizio. Noi, il gruppo RootSaid sta lavorando su un guanto di controllo wireless che può essere utilizzato per controllare l’intero robot, incluso il braccio robotico. Ma c’è qualcosa di fresco in questo guanto.
Questo guanto può rilevare i gesti delle mani SENZA sensore Flex. Sì, hai sentito bene. Vuoi saperne di più? Essere una parte di RootSaid.
Iscriviti sito RootSaid semplicemente inserendo il tuo ID e-mail qui sotto. Riceverai una notifica ogni volta che il tutorial è disponibile per voi di armeggiare con.