remélem, hogy átmentél a Spinel Crux L2 – Arduino Pick and Place Robot robotkarral bevezető részén. Jól néz ki izzó fények alatt, igaz? Miért nem építesz magadnak egyet? Itt megtanuljuk, hogyan építsünk egy robotot, és csatlakoztassunk rá egy robotkart, és építsünk saját DIY pick and place robotot.
mi lesz az Ön számára a tervezés, kód, kapcsolási rajzok, és linkeket vásárolni a saját robotkar, robot kit, alváz és érzékelő modulok ebben a projektben használt.
próbáld meg magad készíteni, és ha elakadtál a projektben, bármikor kapcsolatba léphetsz velünk, vagy felteheted kérdéseidet a megjegyzés mezőben vagy a WhatsApp csoportban. Tehát minden további nélkül kezdje el a projektet!
Arduino Pick and Place Robot Video Tutorial
először vegye meg a videót a Pick and Place Robot tettünk.
először hadd mondjak el egy kicsit azokról az alkatrészekről, amelyekkel ezt a pick and place robotot építettem.
Arduino Pick and Place Robot alkatrészek szükségesek
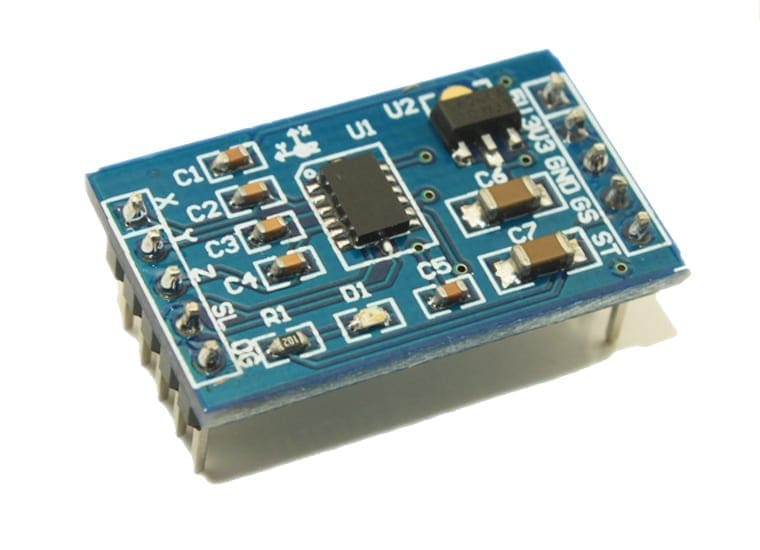
a gyorsulásmérő olyan érzékelő, amely felhasználható a gravitáció miatti gyorsulás érzékelésére a különböző tengelyeken, amelyek egy tárgyra hatnak. Ezzel könnyen kiszámíthatjuk egy tárgy dőlését a talajhoz képest. A Spinel kritikus pontját az X és Y tilt analóg értékek segítségével hajtjuk végre.
itt az MMA7361 gyorsulásmérőt használom a gesztusvezérelt Robot irányításának irányításához; bármilyen gyorsulásmérőt használhat, amely analóg értékeket ad X és Y irányban. Az ok, amiért ezt a gyorsulásmérőt használom, 5 Voltot, valamint 3,3 Voltot tudunk biztosítani Vcc-ként ehhez a gyorsulásmérőhöz. mivel Arduino MKR1000-et használok, az 3.3 Voltot közvetlenül az Arduino-ból tudom csatlakoztatni. Ez is kicsi, nagyon könnyű, és könnyen csatlakoztatható az Arduino és a Raspberry Pi-hez anélkül, hogy sok komplikáció lenne. ha azt szeretnénk, lehet kapni ezt a gyorsulásmérő egy olcsó áron banggood.com.
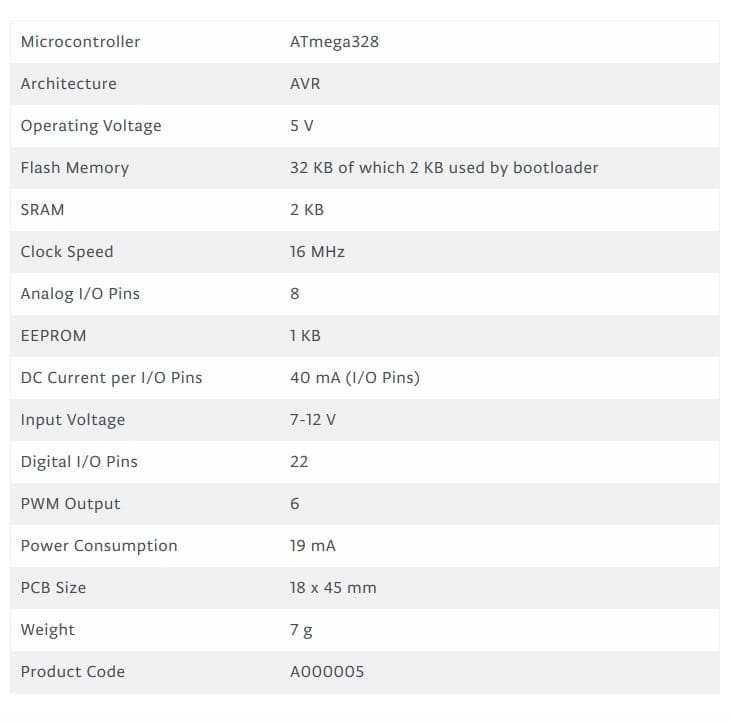
Arduino Nano
ebben a projektben két micorkontrollert kell használnunk – egyet a vezérlőhöz, amely összegyűjti az összes érzékelő adatot, és továbbítja azokat a vezeték nélküli modulhoz, egy másikat pedig a roboton, amely adatokat gyűjt a vevőmodulból, feldolgozza azokat, és vezérli a robotkart és a pick and place robotot. Az Arduino Nano nagyon kicsi, és könnyen felszerelhető a kenyérlap tetejére. Ez könnyen programozható PC-vel USB-n keresztül az Arduino IDE használatával
ez a kártya a Mini USB port segítségével táplálható. Keresztül pin 30, Mi lehet a kínálat egy szabályozatlan feszültségforrás 6 a 20V vagy a pin 27, tudunk biztosítani egy szabályozott áramforrás 5V. a teljesítmény kiválasztása automatikusan történik a Nano board.
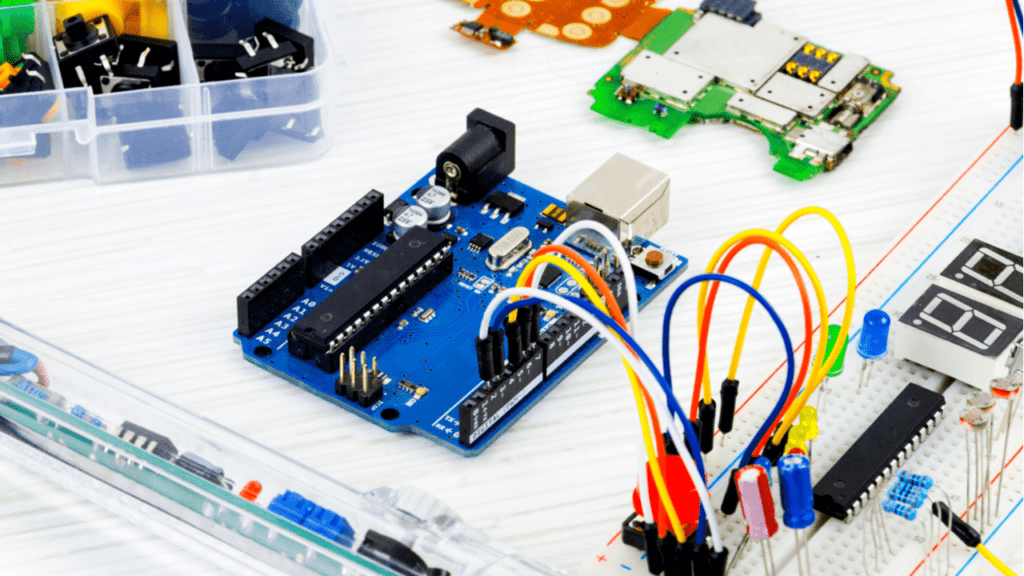
Ismerje Arduino az egyszerű módja
Ön új Arduino? Szeretné, hogy javítsa a készségek Arduino programozás? Ön a megfelelő helyen van. Van egy teljes kezdő szintű oktatóanyagunk az Arduino számára, amely mindent lefed a semmiből. Ebben az ingyenes Arduino bemutató kezdőknek útmutató, mi lesz, hogy egy pillantást Bevezetés Arduino platform, az első lépések Arduino IDE, különböző típusú Arduino táblák, és egy csomó DIY projektek segítségével Arduino. Ezt nézzétek!
lehetővé teszi a tanulás megkezdését Arduino
HC12
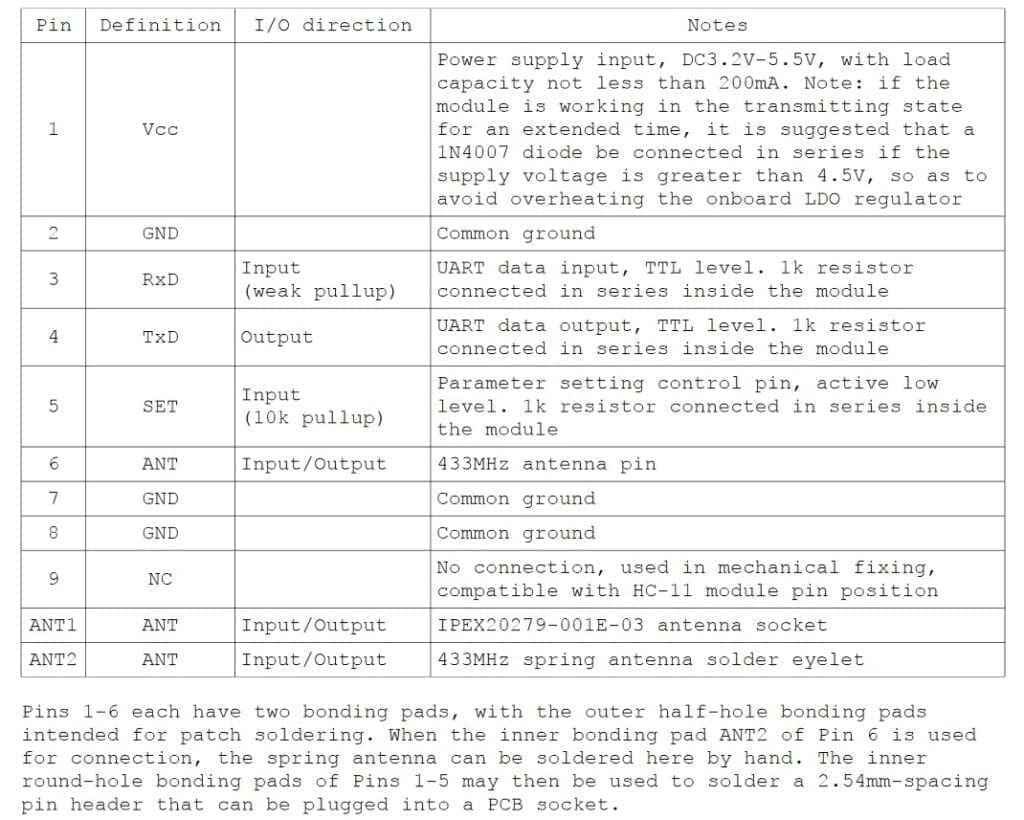
a HC 12 egy nagyon olcsó, nagy hatótávolságú vezeték nélküli modul, amely akár 1,7 KM-es távolságon keresztül is használható vezeték nélküli soros kommunikációhoz. A modul nagyon kompakt, könnyű és breadboard-barát, ami a projektünk legjobb vezeték nélküli vezérlőjévé teszi.

Pinout
HC12 Kapcsolat tesztelése
#include <SoftwareSerial.h>SoftwareSerial HC12(10, 11); // HC-12 TX Pin, HC-12 RX Pinvoid setup() {Serial.begin(9600); // Serial port to computerHC12.begin(9600); // Serial port to HC12}void loop() {while (HC12.available()) { // If HC-12 has dataSerial.write(HC12.read()); // Send the data to Serial monitor}while (Serial.available()) { // If Serial monitor has dataHC12.write(Serial.read()); // Send that data to HC-12}}
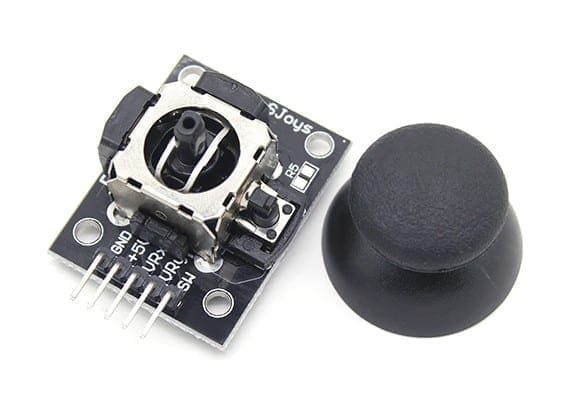
Joystick
ez a legszélesebb körben használt robotvezérlő, amely különféle robot DIY robotkészlettel/robotkar-készlettel rendelkezik, amely az arduino-val való együttműködésre épül. A design nagyon egyszerű és nagyon könnyen használható. Két potenciométert használ az x tengely és az y tengely mozgásának kiszámításához, valamint egy kapcsolót a gombnyomás érzékeléséhez.
ez könnyen csatlakoztatható az Arduino analóg csapjaihoz, és közvetlenül leolvashatja az analóg értékeket.
Download
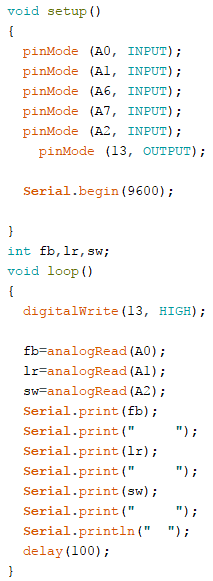
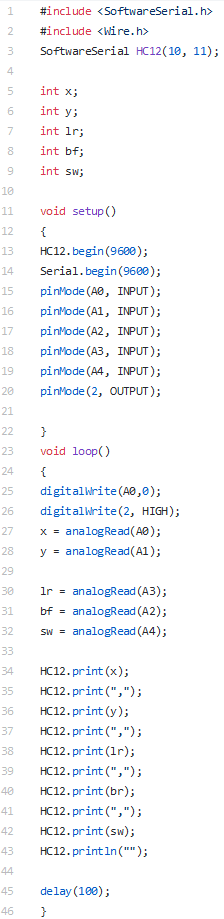
a fő kód feltöltése előtt ellenőrizze, hogy a joystick működik-e ezzel a kóddal. Töltse le a kódot a fenti linkről. Ebben a példában egyszerűen összegyűjtjük az analóg kimeneteket a joystickból az Arduino analóg csapjaival (A0, A1, A2). Ezeket az értékeket a változók tárolják, majd később a Soros monitorra nyomtatják.
ezt a bejegyzést két részre osztjuk
1 – Pick and Place Robot távirányító
az adó egy kenyérlemezből áll, amelybe az összes érzékelőt és alkatrészt felszereljük, hogy megkapjuk az adatokat, amelyeket a pick and place robot és a robotkar vezetésére használnak. Ez magában foglal egy gyorsulásmérőt, egy joystickot és egy HC12 modult.
a gyorsulásmérőt használjuk a robotkar vezérlésére, a joystickot pedig a robot vezérlésére. Egyelőre a joystick gombbal fogjuk bezárni a robot kezét. Az érzékelők adatait vezeték nélkül továbbítják a DIY robotnak egy HC12 modul segítségével.
2-A Pick and Place Robot
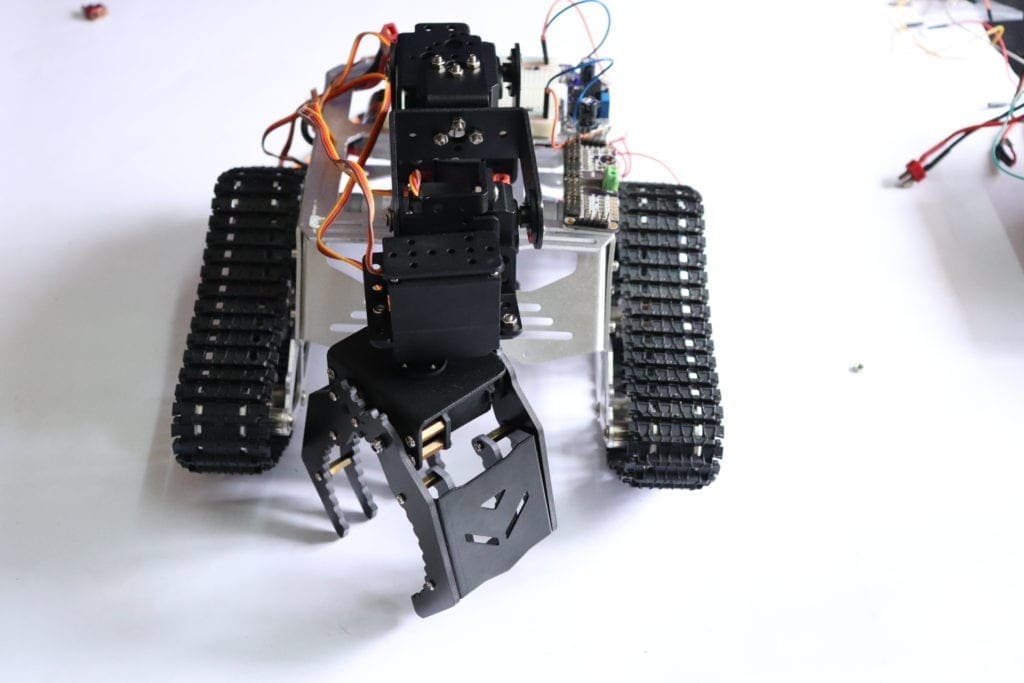
itt elmondom, hogyan lehet robotkart készíteni, robotot építeni és a karot a robot tetejére szerelni. Azt is megtanulják, hogyan kell programozni Arduino olvasni az adatokat érkező vezeték nélküli kommunikációs modul – HC12, feldolgozni, és hogyan kell távvezérelni a robotkar Arduino együtt a robot.
a DIY robotika tanulása még soha nem volt ilyen egyszerű!
a DIY robotika egy szórakoztató és egyszerű dolog, amit percek alatt megtanulhat, ha megfelelő útmutatóval rendelkezik. Szeretne robotikát tanulni, de nem tudja, hol kezdje? Akkor ez a tiéd. Itt segítünk a barkácsolás Robotikájának elindításában, könnyen követhető, 100%-ban ingyenes, lépésről lépésre történő utasításokkal, kezdve a robotika alapjaitól, a Robot részeitől, majd teljes lépésről lépésre kezdjük el az oktatóanyagokat. Itt talál egy fantasztikus robotikai projekt oktatóanyagokat is a kezdőtől a haladóig, hogy elkezdhesse a DIY robotikát.
Start Learning Robotics
1.rész – a távirányító
mint korábban említettük, ez a barkács Robot távvezérelt robot. Tehát a vezérlő részben van egy kenyérlemez, egy joystick – a robot mozgásának, valamint a robot öklének zárásának és nyitásának vezérlésére, egy gyorsulásmérő – a robotkar mozgatására, és egy vezeték nélküli modul, amely ezeket az adatokat továbbítja a robotnak.
csatlakozások
egyszerűen csatlakoztassa az összes alkatrészt az alábbiak szerint. Az Arduino-t egy 5 V-os tápegységgel tápláljuk, és az arduino 5 V-os Voutját használjuk az összes többi modul bekapcsolására.
a távirányító PCB
az előző videómban megmutattam, hogyan készítheti el ezt a vezeték nélküli távirányítót az RC Robot számára egy breadboard gyorsulásmérő, gombok és HC12 vezeték nélküli modul segítségével. Ha még nem látta, kérjük, először olvassa el az alábbi videót. Mert azt a távirányítót fogjuk használni, hogy irányítsuk ezt a robotot.
alapvetően ez a távirányító az, hogy analóg és digitális adatokat olvas fel olyan érzékelőkből, mint a gyorsulásmérő gombok joystickja, és külön változókban tárolja őket. Ezeket a változókat egyesítve egyetlen hosszú karakterláncot alkotunk, amelyet a HC12 vezeték nélküli modul segítségével küldünk el robotunknak.
rajzrajzok és NYÁK-tervezés Altium
használatával, így az Altium designert használtam az áramkör rajzolásához és a NYÁK megtervezéséhez. Ez egy hatékony eszköz, amely felhasználható saját PCB-k tervezésére és létrehozására a projekthez, valamint összetett és többjátékos PCB-k ipari felhasználásra. Itt található a link az Altium próbaverziójához. Tehát győződjön meg róla, hogy ellenőrizze.
Circuit
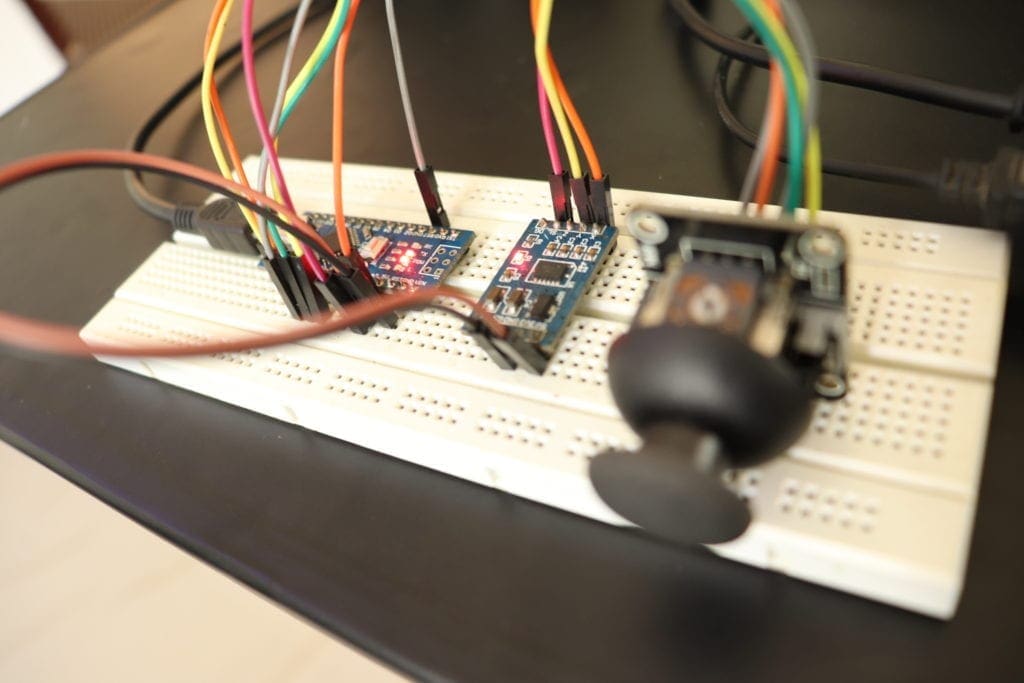
csináltam egy áramkör, amely tartalmazza az összes komponenst: a joystick, gyorsulásmérő, arduino nano és hc12 modul csatlakozik a GPIO csap az arduino és összeszerelt egy breadboard.

hibátlanul működött, de a probléma az volt, az egész tábla nagyon rendetlennek tűnt, az összes áthidaló vezeték ide-oda ment. Ezért úgy döntöttem, hogy PCB-vel megyek.
a PCB verzióban 4 kapcsolót adtam hozzá, amelyeket a következő projekthez fogok használni.
azt is hozzá egy 7805 szabályozó, amely segít nekem, hogy egy bemeneti feszültség között 7V és 35V, hogy tudok használni egy 5V USB tápegység, 9V akkumulátor vagy akár 12 V Lipo akkumulátor nélkül kérdéseket. Azt is hozzá néhány jelző LED-ek, hogy hadd tudja, ha valami leállt. Az áramkört az alábbi linken találja meg.
PCB elrendezés
az Altium PCB designer PCB elrendezés készítéséhez is használható. Ezt az elrendezést készítettem az áramkör segítségével. Mint látható, ez egy kétrétegű NYÁK, ami azt jelenti, hogy az Útválasztás mindkét oldalon – a felső oldalon, valamint az alsó oldalon-van.

a tábla bal oldalán hagytam egy kis üres helyet, hogy megtartsam az elemeimet, most nálam van a Gerber fájl. Csak annyit kellett tennem, hogy megrendelem a PCB-t.
miután megkaptam az összes alkatrészt, összeforrasztottam őket, és ez az utolsó PCB. Látja, az összes alkatrész csatlakozik a táblához.
int x;int y;int lr;int bf;int sw;void setup(){ Serial.begin(9600);pinMode(A0, INPUT);pinMode(A1, INPUT);pinMode(A2, INPUT);pinMode(A3, INPUT);pinMode(A4, INPUT);pinMode(2, OUTPUT);}void loop(){digitalWrite(A0,0);digitalWrite(2, HIGH);x = analogRead(A0);y = analogRead(A1);lr = analogRead(A2);bf = analogRead(A3);sw = analogRead(A4);Serial.print("Accelerometer");Serial.print("X = ");Serial.println(x);Serial.print("Y = ");Serial.println(y);Serial.println("");Serial.print("Joy Stick");Serial.println("");Serial.print("Left/Right = ");Serial.println(lr);Serial.print("Back/Forward = ");Serial.println(bf);Serial.print("Switch = ");Serial.println(sw);Serial.println("");Serial.println("");delay(250);}
a kód feltöltése után indítsa el a Soros monitort, és ellenőrizze, hogy az összes érték megfelelően jelenik-e meg.
ezután feltöltheti az alábbi valódi kódot.
Kód
egyszerűen töltse le az alábbi kódot az alábbi letöltési link segítségével, és töltse fel a vezérlőjére.
letöltés
2.rész-a Robot
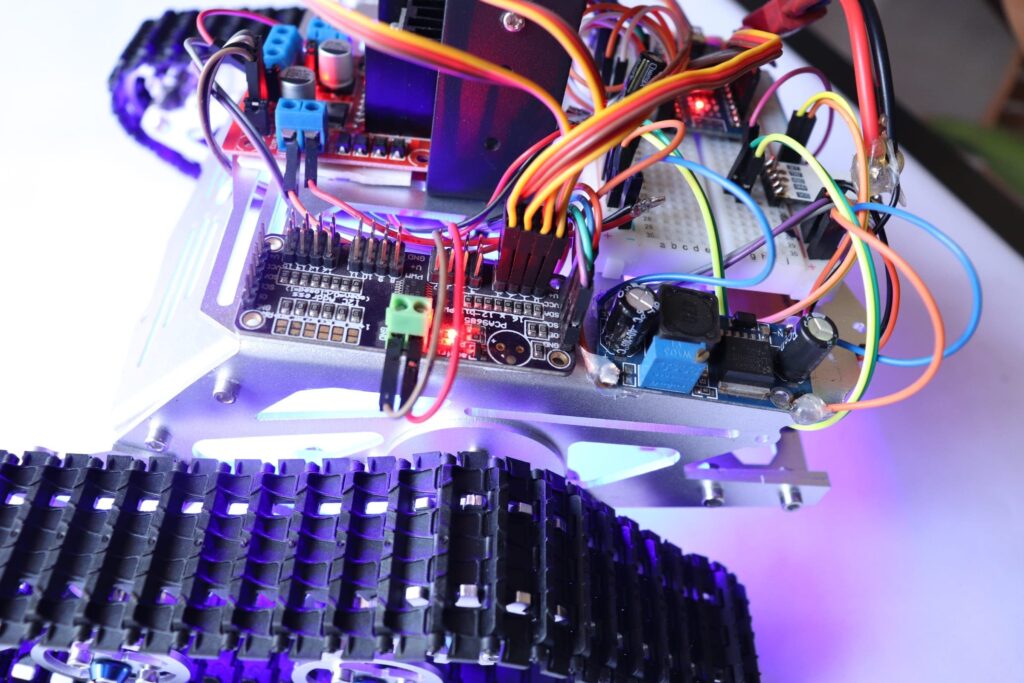
a robot fő része az alváz, amelybe az összes alkatrészt beépítjük, beleértve a kart is.
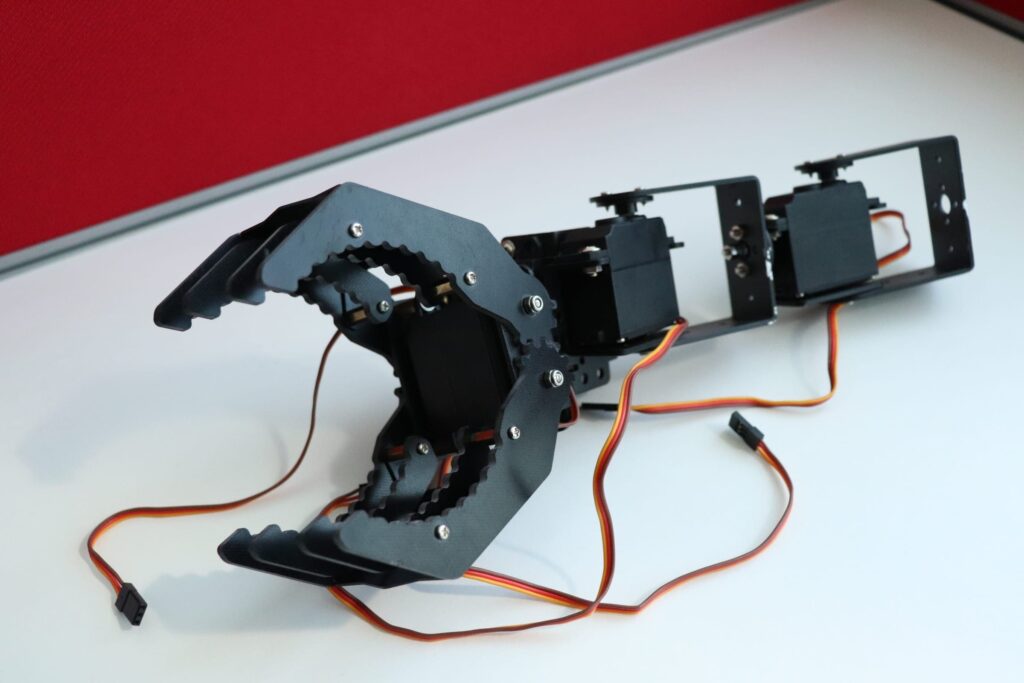
a robotkar készletet a banggood.com. Ez a robotkar jó minőségű alumíniumból készül,és nagyon könnyű. Ennek annyi rögzítési pontja van, amely lehetővé teszi számunkra, hogy bármilyen robot testhez/alvázhoz csatlakozzunk szerelési lyukak fúrása nélkül.
kattintson ide, hogy ellenőrizze
4 Szervomotor van, amelyek összesen 3 Szabadságfokot adnak a robotkarnak. A szervomotorokat tartalmazza, és az üzemi feszültség 4,8-6V.
ezt megvásárolhatja a szervomotorral együtt, vagy külön is megvásárolhatja őket.
a pick and place robot elkészítéséhez használt alvázról szeretnék beszélni. Megvan ez a készlet banggood.com. nem csak ez, olyan sokféle robotkeret, motor és szinte minden érzékelő van az Arduino, a raspberry pi és más elektronikai és hobbi projektek elvégzéséhez. Ezeket a dolgokat olcsó áron kapja meg, nagyon gyors és minőségi szállítással.
és a nagyszerű dolog ebben a készletben, hogy minden eszközt biztosítanak a keret összeszereléséhez.
Szerezd meg a barkács Robot készlet BangGood
kattintson ide, hogy nézd meg!!
szervomotor vezérlés
a PCA9685 egy 16 csatornás 12 bites PWM I2C-busz vezérelt szervomotor meghajtó. A vezető nagyon könnyen csatlakoztatható az arduino-hoz, a Raspberry Pie – hez, és könnyen programozható egy vagy több szervomotor vezérlésére, valamint saját RC sík, autó, hajó, quadrapod, hexapod vagy bármi, amit csak akar.
kövesse ezt a linket, hogy többet tudjon meg a szervomotor meghajtóról.
Pick and Place Robot – kapcsolatok
itt egy 12 V-os tápegységet fogunk használni az egész robot bekapcsolásához. A nyers 12 voltot a LED-hez tápláljuk,a motor meghajtó IC feszültségét pedig a motorhoz.
ezután egy szabályozót használunk, hogy 5 V-ra csökkentsük a feszültséget, és tápláljuk az Arduino, HC12 és szervomotor meghajtóhoz.
az egyenáramú motorokat egy jó motorvezérlő IC használatával lehet vezetni. Ebben a projektben IC – L293D kettős H Hídmotor-meghajtót fogok használni, amely egyszerre két szervomotort képes vezérelni.
az egyenáramú motorok l293d IC használatával kapcsolatos további részletekért kattintson ide. Ha még nem ismeri ezt, akkor jobb, ha ezt átmegy, mielőtt folytatná a következő lépést, hogy jobban megértse a projektet.
egyszerűen csatlakoztassa az összes alkatrészt az alábbiak szerint.
az Arduino-t egy 5 V-os tápegységgel tápláljuk, és az arduino 5 V-os Vout-ját használjuk az összes többi modul bekapcsolásához.
Arduino – Servo motor Driver
- 5 Vout – VCC Arduino
- Gnd – Gnd
- SDA – SDA
- SCL – SCL
Arduino – HC12
- 5 Vout – VCC Arduino
- Gnd – Gnd
- 10 – TX
- 11 – Rx
Servo motor Driver – Servo Motor
- Servo 1 – Port 000
- Servo 2 – Port 001
- Servo 3 – Port 002
- Servo 4 – Port 003
Arduino – L293D
- Pin 2 – Motor 1 A
- Pin 3 – Motor 1 B
- Pin 4-Motor 2 A
- Pin 5-Motor 2 B
L293D
a H-híd csak akkor működik, ha az engedélyező csap logikára van állítva 1
az IC használata során egy dolgot szem előtt kell tartani: két csap van, ahol a bemeneti energiát kell szolgáltatnunk. Pin 8 és Pin 16; mindkettő teljesen más célokra szolgál. A 9-es csap a motor vezetésére szolgál, amely képes kezelni a 6 V-tól 30 V-ig terjedő feszültséget, valamint a 16-os csapot, amely bekapcsolja a belső áramkör IC-jét. Semmilyen körülmények között ne cserélje ki ezt a két csapot, különben leéghet a chip.
Kód
egyszerűen töltse le az alábbi kódot az alábbi letöltési link segítségével, és töltse fel neked DIY robot és jó lesz menni.

letöltés
Let Ride!!!
miután feltöltötte a kódot a pick and place robotra, csatlakoztathatja robotját egy 12 V-os áramforráshoz, a robot vezeték nélküli vezérlőjét pedig egy 5 V-os áramforráshoz.
most már képesnek kell lennie arra, hogy távolról vezérelje a robotot a vezeték nélküli vezérlő segítségével.
ez csak a kezdet. Mi, a RootSaid csoport egy vezeték nélküli vezérlőkesztyűn dolgozunk, amely az egész robot vezérlésére használható, beleértve a robotkart is. De van valami jó ebben a kesztyűben.
ez a kesztyű Flex érzékelő nélkül képes érzékelni a kézmozdulatokat. Igen, jól hallottad. Szeretne többet megtudni? Legyen része a RootSaid – nek.
iratkozzon fel a RootSaid webhelyre az alábbi e-mail azonosító megadásával. Értesítést kap, amikor az oktatóanyag elérhető az Ön számára.