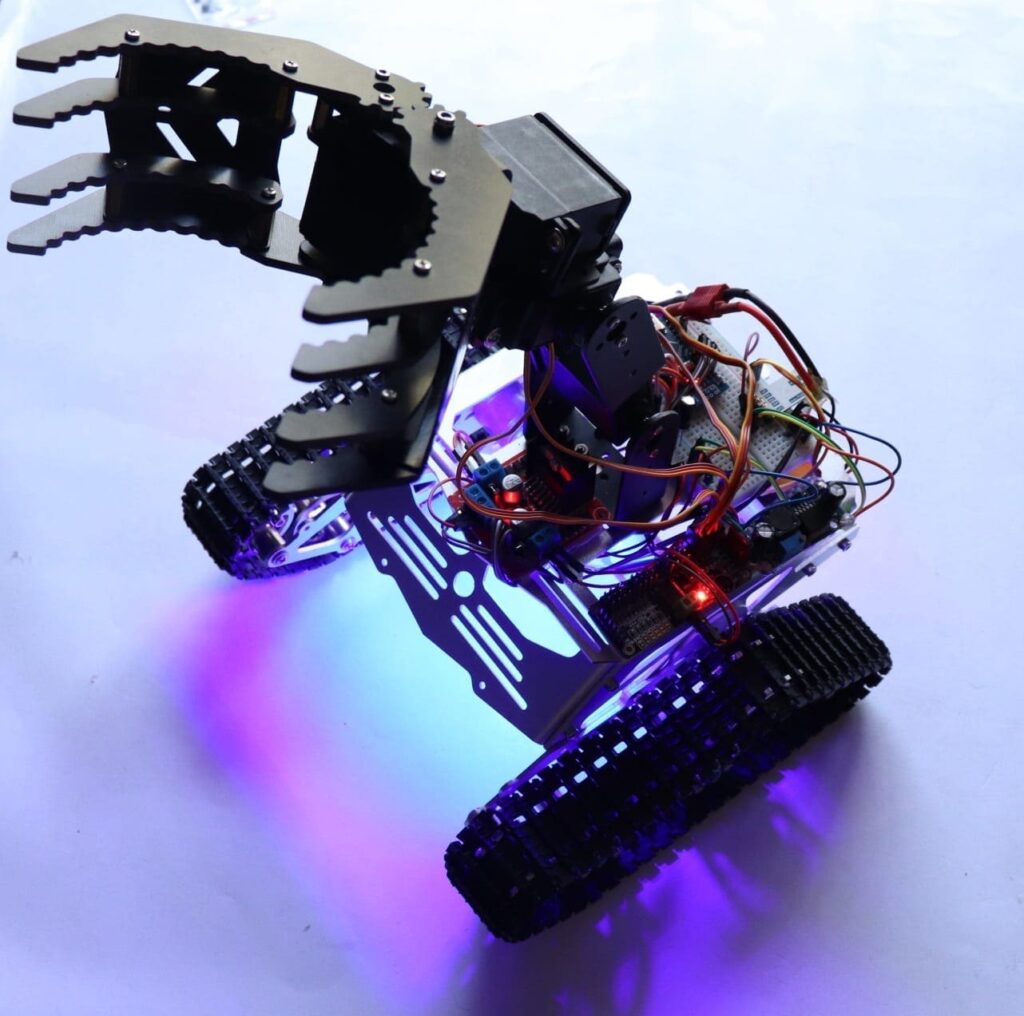
J’espère que vous avez parcouru la partie d’introduction du robot Pick and Place Spinelle Crux L2–Arduino avec bras robotique. Ça a l’air cool sous des lumières rougeoyantes, non? Pourquoi ne pas en construire un pour vous-même? Ici, nous allons apprendre à construire un robot et à connecter un bras robotique dessus et à construire notre propre robot de sélection et de placement.
Nous vous fournirons la conception, le code, les schémas de circuits et les liens pour acheter votre propre bras robotique, kit de robot, châssis et modules de capteurs utilisés dans ce projet.
Essayez d’en créer un vous-même et si vous êtes coincé avec le projet, vous pouvez toujours nous contacter ou poser vos questions dans la boîte de commentaires ou dans notre groupe WhatsApp. Alors sans plus tarder, commençons le projet!
Tutoriel Vidéo sur le robot Pick and Place Arduino
Première prise de la vidéo du Robot Pick and Place que nous avons réalisé.
Permettez-moi d’abord de vous parler un peu des composants que j’ai utilisés pour construire ce robot de sélection et de placement.
Composants de robot de transfert et de placement Arduino Nécessaires
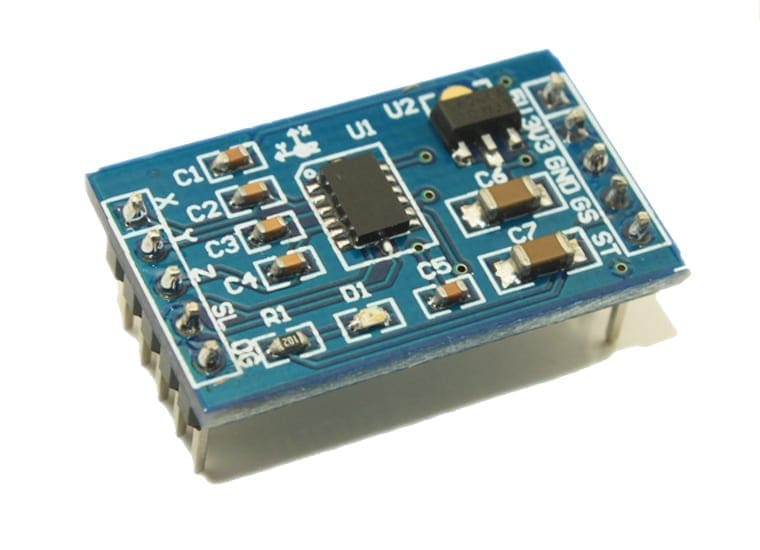
Un accéléromètre est un capteur qui peut être utilisé pour détecter l’accélération due à la gravité sur divers axes agissant sur un objet. En utilisant cela, nous pouvons facilement calculer l’inclinaison d’un objet par rapport au sol. Nous allons piloter notre nœud de spinelle en utilisant les valeurs analogiques d’inclinaison X et Y.
Ici, j’utilise l’accéléromètre MMA7361 pour contrôler la direction de notre Robot à commande gestuelle; vous pouvez utiliser n’importe quel accéléromètre qui donnera des valeurs analogiques dans les directions X et Y. La raison pour laquelle j’utilise cet accéléromètre est que nous pouvons fournir 5 volts ainsi que 3,3 volts comme Vcc à cet accéléromètre. comme j’utilise Arduino MKR1000, je peux connecter 3,3 Volts directement à partir de l’Arduino. Il est également petit très léger et peut facilement être connecté à Arduino et Raspberry Pi sans trop de complications. si vous le souhaitez, vous pouvez acheter cet accéléromètre à un prix bon marché chez banggood.com .
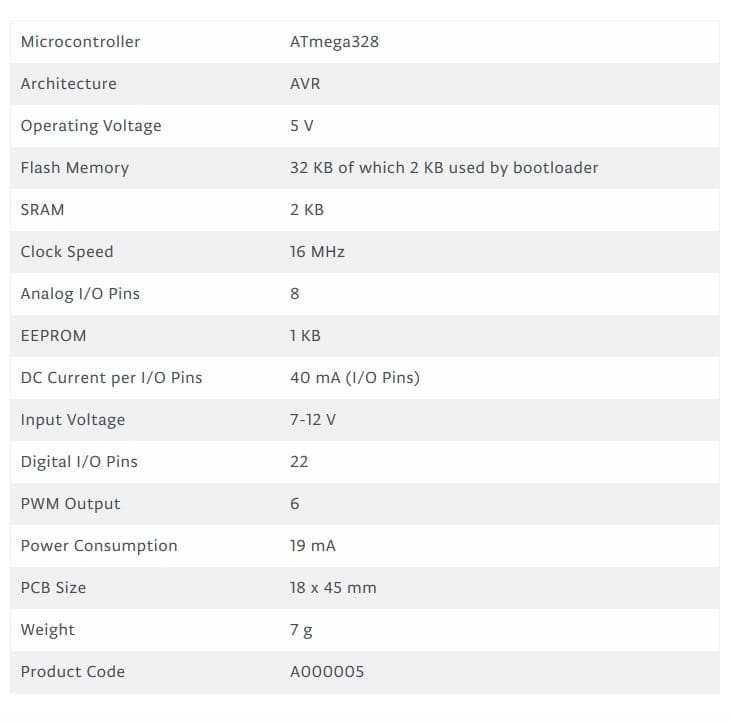
Arduino Nano
Dans ce projet, nous devrons utiliser deux microcontrôleurs – un pour le contrôleur qui recueillera toutes les données du capteur et les transmettra au module sans fil et un autre sur le robot, qui recueillera les données du module récepteur, les traitera et contrôlera le bras robotique et le robot de transfert. L’Arduino Nano est très petit et peut facilement être installé sur le dessus de la planche à pain. Cela peut être facilement programmé à l’aide d’un PC via USB en utilisant Arduino ID
Cette carte peut être alimentée à l’aide du port Mini USB. Par la broche 30, nous pouvons fournir une source de tension non régulée de 6 à 20V ou par la broche 27, nous pouvons fournir une source d’alimentation régulée de 5V. La sélection de la puissance sera automatiquement effectuée par la carte Nano.
Apprenez Arduino de la manière la plus simple
Êtes-vous nouveau sur Arduino? Voulez-vous améliorer vos compétences en programmation Arduino? Vous êtes au bon endroit. Nous avons un tutoriel complet de niveau débutant pour Arduino qui couvre tout à partir de zéro. Dans ce Tutoriel Arduino gratuit pour le guide des débutants, nous allons jeter un coup d’œil à l’introduction à la plate-forme Arduino, à la mise en route de l’E Arduino, aux différents types de cartes Arduino et à de nombreux projets de bricolage utilisant Arduino. Regarde ça !
Commençons à apprendre Arduino
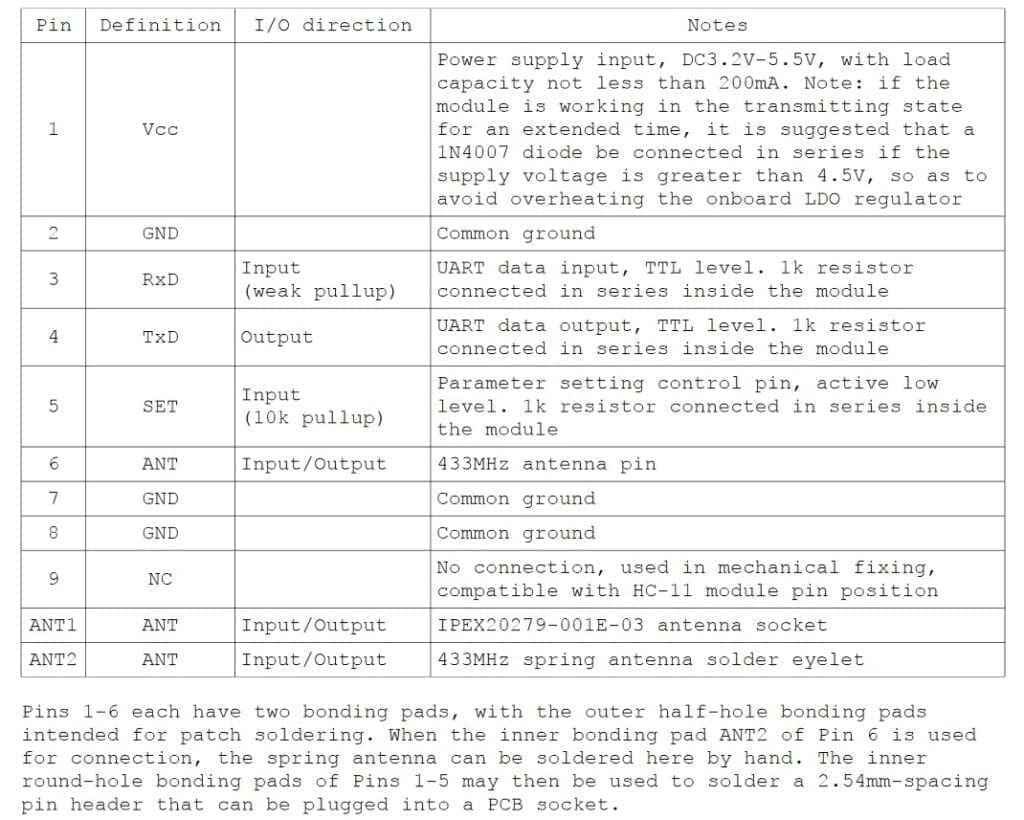
HC12
HC 12 est un module sans fil longue portée vraiment bon marché qui peut être utilisé pour la communication série sans fil sur une longue distance allant jusqu’à 1,7 KM. Le module est vraiment léger et compact, ce qui en fait le meilleur contrôleur sans fil pour notre projet.

Brochage
Test de connexion HC12
#include <SoftwareSerial.h>SoftwareSerial HC12(10, 11); // HC-12 TX Pin, HC-12 RX Pinvoid setup() {Serial.begin(9600); // Serial port to computerHC12.begin(9600); // Serial port to HC12}void loop() {while (HC12.available()) { // If HC-12 has dataSerial.write(HC12.read()); // Send the data to Serial monitor}while (Serial.available()) { // If Serial monitor has dataHC12.write(Serial.read()); // Send that data to HC-12}}
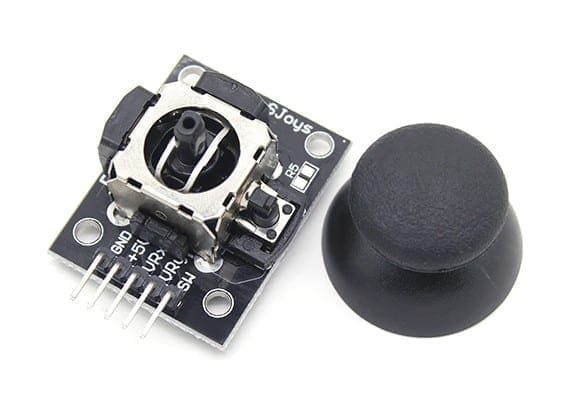
Joystick
C’est le contrôleur robotique le plus utilisé qui est livré avec divers kit de robot à monter soi-même / kit de bras de robot conçu pour fonctionner avec arduino. Le design est assez simple et très facile à utiliser. Il utilise deux potentiomètres pour calculer le mouvement dans les axes x et y et un interrupteur pour détecter la pression sur le bouton.
Cela peut être facilement connecté aux broches analogiques de l’arduino et lire directement les valeurs analogiques.
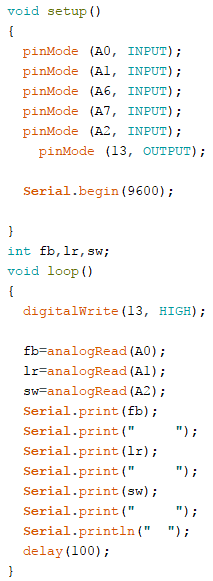
Télécharger
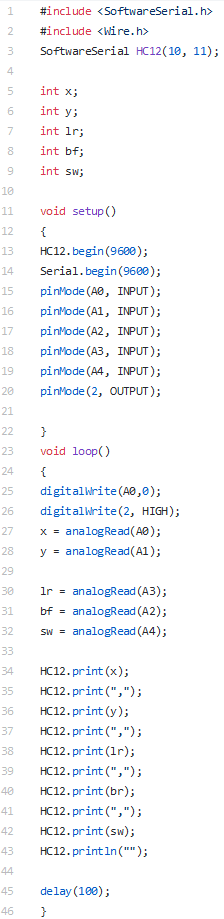
Avant de télécharger le code principal, assurez-vous que votre joystick fonctionne en utilisant ce code. Téléchargez le code à partir du lien ci-dessus. Dans cet exemple, ce que nous faisons est simplement de collecter les données des sorties analogiques du Joystick à l’aide des broches analogiques (A0, A1, A2) d’arduino. Ces valeurs sont stockées dans les variables et sont ensuite imprimées sur le moniteur série.
Nous allons diviser ce poste en deux parties
1 – Télécommande du robot Pick and Place
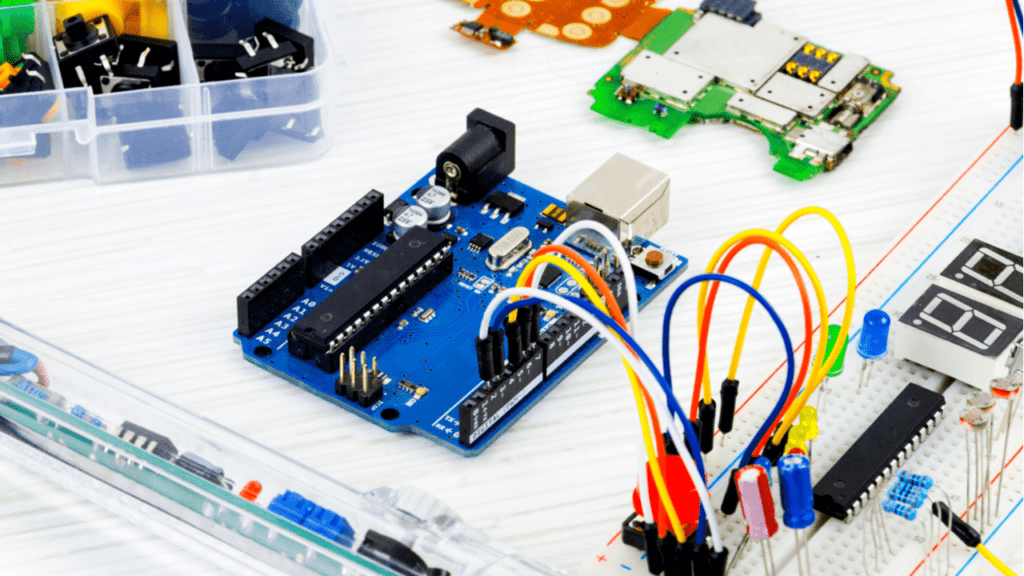
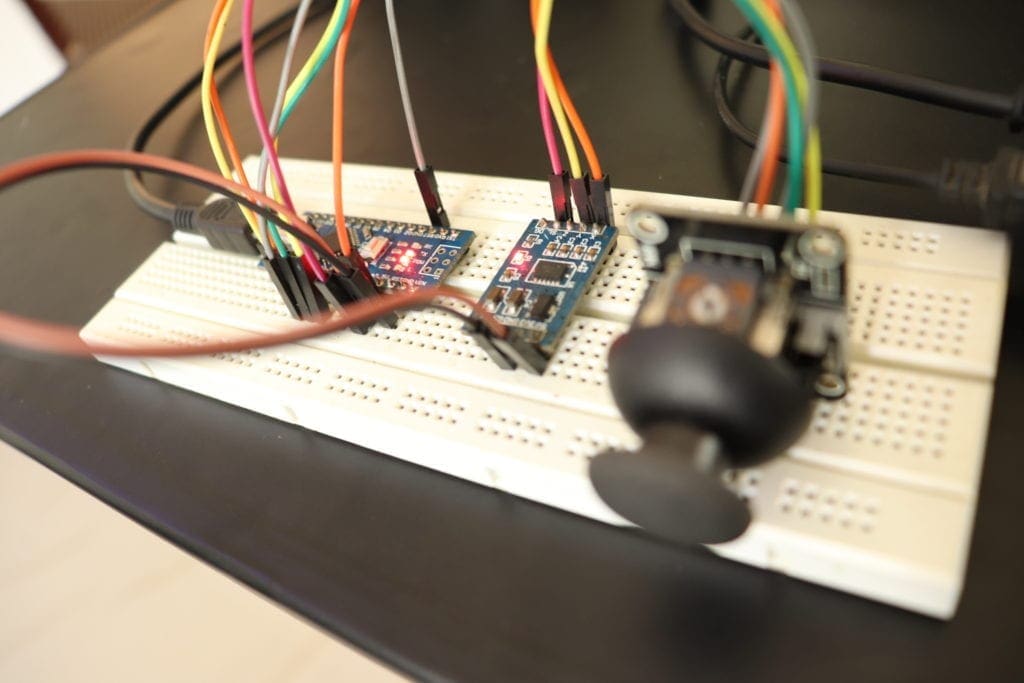
L’émetteur est constitué d’une platine de prototypage dans laquelle nous montons tous les capteurs et composants pour obtenir les données qui sont utilisées pour piloter le robot pick and place et le bras robotique. Cela comprend un accéléromètre, un joystick et un module HC12.
Nous utiliserons l’accéléromètre pour contrôler le bras robotique et le joystick pour contrôler le robot. Pour l’instant, nous allons utiliser le bouton du joystick pour fermer la main robotique. Les données de ces capteurs sont transmises sans fil au robot de bricolage à l’aide d’un module HC12.
2 – Le robot Pick and Place
Ici, je vais vous dire comment fabriquer un bras robotique, construire un robot et monter le bras sur le robot. Vous apprendrez également à programmer Arduino pour lire les données provenant du module de communication sans fil – HC12, à les traiter et à contrôler à distance le bras robotique avec Arduino avec le robot.
Apprendre la robotique DIY n’a jamais été aussi FACILE !
La robotique DIY est une chose amusante et facile que vous pouvez apprendre en quelques minutes si vous avez un guide approprié. Vous voulez apprendre la robotique mais vous ne savez pas par où commencer? Alors c’est pour toi. Ici, nous vous aiderons à démarrer avec la robotique DIY avec des instructions étape par étape faciles à suivre, 100% GRATUITES, à partir des bases de la robotique, des parties du Robot, puis nous commencerons des tutoriels complets étape par étape. Ici, vous trouverez également une collection impressionnante de tutoriels de projet de robotique du niveau débutant à avancé pour vous permettre de commencer avec la robotique de bricolage.
Commencez à apprendre la robotique
Partie 1 – La télécommande
Comme mentionné précédemment, ce robot à monter soi-même est un robot télécommandé. Ainsi, dans la section contrôleur, nous avons une planche à pain, un joystick – pour contrôler le mouvement du robot et la fermeture et l’ouverture du poing du robot, un accéléromètre – pour déplacer le bras robotique, et un module sans fil pour transmettre ces données au robot.
Connexions
Connectez simplement tous les composants comme indiqué ci-dessous. Nous allons alimenter l’Arduino avec une batterie externe de 5V et utiliser le Vout de 5 V de l’arduino pour alimenter tous les autres modules.
La carte PCB de la télécommande
Dans ma vidéo précédente, j’ai montré comment vous fabriquez cette télécommande sans fil pour votre robot RC à l’aide d’un accéléromètre de platine de prototypage, de boutons et d’un module sans fil HC12. Si vous ne l’avez pas encore vu, veuillez d’abord voir la vidéo ci-dessous. Parce que nous utiliserons cette télécommande pour contrôler ce robot.
Fondamentalement, ce que fait cette télécommande, c’est qu’elle lit les données analogiques et numériques à partir de capteurs tels que les boutons d’accéléromètre joystick et les stocke dans des variables distinctes. Ces variables seront combinées ensemble pour former une seule longue chaîne et cette chaîne sera envoyée à notre robot à l’aide du module sans fil HC12.
Dessiner des schémas et la conception de circuits imprimés en utilisant Altium
J’ai donc utilisé Altium Designer pour dessiner le circuit et concevoir le circuit imprimé. C’est un outil puissant qui peut être utilisé pour concevoir et créer vos propres PCB pour votre projet ainsi que des PCB complexes et multijoueurs à usage industriel. Voici le lien vers la version d’essai d’Altium. Alors assurez-vous de vérifier.
Circuit
J’ai fait un circuit qui comprenait tous les composants: le joystick, l’accéléromètre, le module arduino nano et hc12 se sont connectés à la broche GPIO de l’arduino et l’ont assemblé sur une platine de prototypage.

Cela fonctionnait parfaitement mais le problème était que toute la planche avait l’air vraiment désordonnée avec tous les fils de cavalier qui allaient ici et là. J’ai donc décidé d’y aller avec PCB.
Dans la version PCB, j’ai ajouté 4 commutateurs que j’utiliserai pour le prochain projet.
J’ai également ajouté un régulateur 7805 qui m’aidera à fournir une tension d’entrée comprise entre 7V et 35V afin que je puisse utiliser une alimentation USB 5V, une batterie 9V ou même une batterie Lipo 12V sans aucun problème. J’ai également ajouté des voyants indicateurs qui me permettront de savoir si quelque chose a cessé de fonctionner. Vous trouverez le circuit dans le lien ci-dessous.
Disposition des circuits imprimés
Altium PCB designer peut également être utilisé pour réaliser la disposition des circuits imprimés. C’est la disposition que j’ai faite en utilisant le circuit. Comme vous pouvez le voir, il s’agit d’un circuit imprimé à double couche, ce qui signifie que le routage est là des deux côtés – le côté supérieur ainsi que le côté inférieur.

Sur le côté gauche de la carte, j’ai laissé un espace vide pour garder mes batteries Maintenant j’ai le fichier Gerber avec moi. Tout ce que j’avais à faire est de commander le PCB.
Une fois que j’ai obtenu tous les composants, je les ai tous soudés ensemble et c’est mon PCB final. Vous voyez, tous les composants sont connectés à la carte maintenant.
int x;int y;int lr;int bf;int sw;void setup(){ Serial.begin(9600);pinMode(A0, INPUT);pinMode(A1, INPUT);pinMode(A2, INPUT);pinMode(A3, INPUT);pinMode(A4, INPUT);pinMode(2, OUTPUT);}void loop(){digitalWrite(A0,0);digitalWrite(2, HIGH);x = analogRead(A0);y = analogRead(A1);lr = analogRead(A2);bf = analogRead(A3);sw = analogRead(A4);Serial.print("Accelerometer");Serial.print("X = ");Serial.println(x);Serial.print("Y = ");Serial.println(y);Serial.println("");Serial.print("Joy Stick");Serial.println("");Serial.print("Left/Right = ");Serial.println(lr);Serial.print("Back/Forward = ");Serial.println(bf);Serial.print("Switch = ");Serial.println(sw);Serial.println("");Serial.println("");delay(250);}
Une fois ce code téléchargé, démarrez le moniteur série et vérifiez si toutes ces valeurs sont affichées correctement.
Ensuite, vous pouvez télécharger le code réel ci-dessous.
Code
Téléchargez simplement le code ci-dessous en utilisant le lien de téléchargement ci-dessous et téléchargez-le sur votre contrôleur.
Télécharger
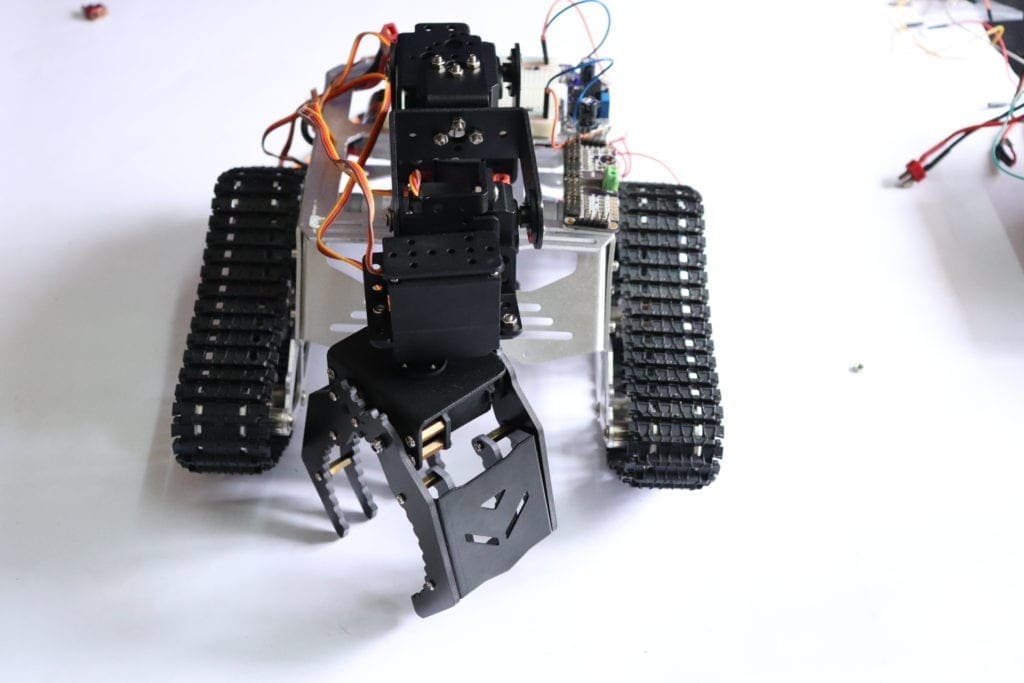
Partie 2 – Le robot
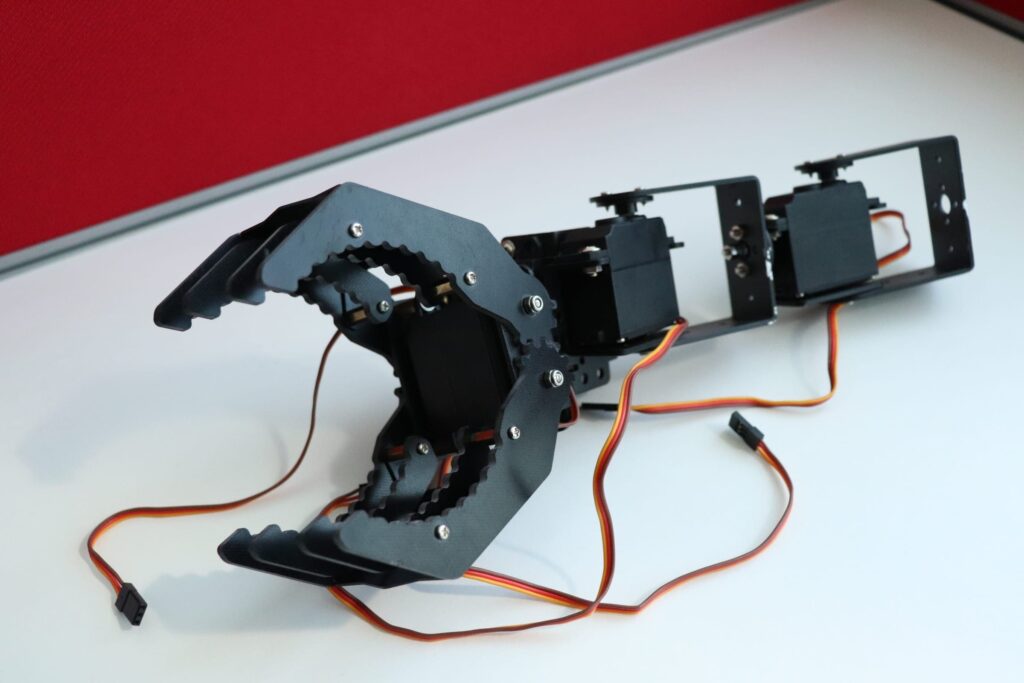
La partie principale du robot est le châssis dans lequel nous montons tous les composants, y compris le bras.
J’ai reçu le kit de bras robotisé de banggood.com . Ce bras robotique est fabriqué en aluminium de bonne qualité et est vraiment léger. Celui-ci a tellement de points de montage qui nous permettront de nous connecter à n’importe quel corps / châssis de robot sans percer de trous de montage.
Cliquez ici pour le vérifier
Il y a 4 servomoteurs qui donneront au bras robotisé un total de 3 degrés de liberté. Les servomoteurs sont inclus et la tension de fonctionnement est de 4,8-6V.
Vous pouvez soit l’acheter avec le servomoteur, soit les acheter séparément.
Le châssis que j’ai utilisé pour fabriquer ce robot pick and place est quelque chose dont je voudrais parler. J’ai ce kit banggood.com . Non seulement celui-ci, ils ont tellement de types de cadres de robots, de moteurs et presque tous les capteurs pour faire Arduino, raspberry pi et d’autres projets électroniques et de loisirs. Vous obtiendrez toutes ces choses pour un prix bon marché avec une expédition très rapide et de qualité.
Et la grande chose à propos de ce kit est qu’ils fournissent tous les outils dont vous avez besoin pour assembler le cadre ensemble.
Obtenez votre Kit de Robot à bricoler soi-même Chez BangGood
Cliquez Ici pour le vérifier!!
Commande de servomoteur
Le PCA9685 est un pilote de servomoteur commandé par bus PWM I2C à 16 canaux et 12 bits. Le pilote peut très facilement se connecter à votre arduino, Tarte aux framboises et facilement programmé pour contrôler un ou plusieurs servomoteurs et créer votre propre avion RC, voiture, navire, quadrapod, hexapod ou tout ce que vous voulez.
Suivez ce lien pour en savoir plus sur le pilote du servomoteur.
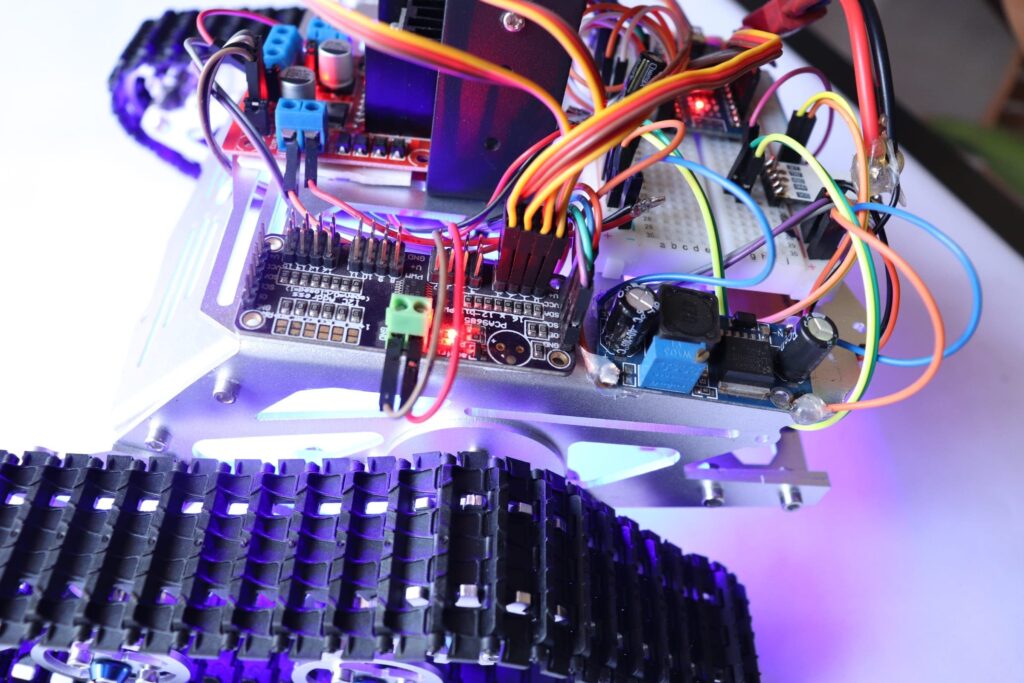
Connexions de robot Pick and Place
Ici, nous utiliserons une alimentation 12 V pour alimenter l’ensemble du robot. Nous alimentons le 12 volts brut à la LED et la tension IC du pilote du moteur pour le moteur.
Ensuite, nous utilisons un régulateur pour abaisser la tension à 5V et l’alimenter en Arduino, HC12 et servomoteur.
Vous pouvez piloter les moteurs à courant continu en utilisant un bon circuit intégré de commande de moteur. Dans ce projet, j’utiliserai le pilote de moteur à double pont en H IC–L293D qui peut contrôler deux servomoteurs à la fois.
Pour plus de détails sur la conduite de moteurs à courant continu à l’aide du circuit intégré L293D, cliquez ici. Si vous êtes nouveau dans ce domaine, il est préférable de passer à l’étape suivante avant de passer à l’étape suivante pour mieux comprendre le projet.
Connectez simplement tous les composants comme indiqué ci-dessous.
Nous allons alimenter l’Arduino avec une batterie externe de 5V et utiliser le Vout de 5 V de l’arduino pour alimenter tous les autres modules.
Arduino – Servo motor Driver
- 5 Vout – VCC Arduino
- Gnd – Gnd
- SDA – SDA
- SCL – SCL
Arduino – HC12
- 5 Vout – VCC Arduino
- Gnd – Gnd
- 10 – TX
- 11 – Rx
Servo motor Driver – Servo Motor
- Servo 1 – Port 000
- Servo 2 – Port 001
- Servo 3 – Port 002
- Servo 4 – Port 003
Arduino – L293D
- Pin 2 – Motor 1 A
- Pin 3 – Motor 1 B
- Broche 4–Moteur 2 A
- Broche 5-Moteur 2 B
L293D
Le pont en H ne fonctionnera que si la broche d’activation est réglée sur Logic 1
Une chose à garder à l’esprit lors de l’utilisation de ce circuit intégré est qu’il y a deux broches où nous devons fournir la puissance d’entrée. Broche 8 et broche 16; les deux sont à des fins entièrement différentes. La broche 9 sert à l’entraînement du moteur qui peut supporter une tension de 6 V à 30 Volts et la broche 16 qui alimentera le circuit intégré pour le circuit interne. En aucun cas, vous ne devez échanger ces deux broches sous peine de brûler la puce.
Code
Téléchargez simplement le code ci-dessous en utilisant le lien de téléchargement ci-dessous et téléchargez-le sur votre robot à monter soi-même et vous serez prêt à partir.

Télécharger
Roulons!!!
Une fois le code téléchargé sur votre robot pick and place, vous pouvez connecter votre robot à une source d’alimentation 12 V et votre contrôleur sans fil robot à une source d’alimentation 5 V.
Maintenant, vous devriez pouvoir contrôler le robot à distance à l’aide de la manette sans fil.
Ce n’est qu’un début. Nous, le groupe RootSaid, travaillons sur un gant de contrôle sans fil qui peut être utilisé pour contrôler l’ensemble du robot, y compris le bras robotique. Mais il y a quelque chose de cool dans ce gant.
Ce gant peut détecter les gestes de la main SANS capteur de flexion. Oui, vous avez bien entendu. Vous voulez en savoir plus ? Faites partie de RootSaid.
Abonnez-vous au site Web RootSaid en entrant simplement votre identifiant e-mail ci-dessous. Vous recevrez une notification chaque fois que le tutoriel est disponible pour que vous puissiez le bricoler.