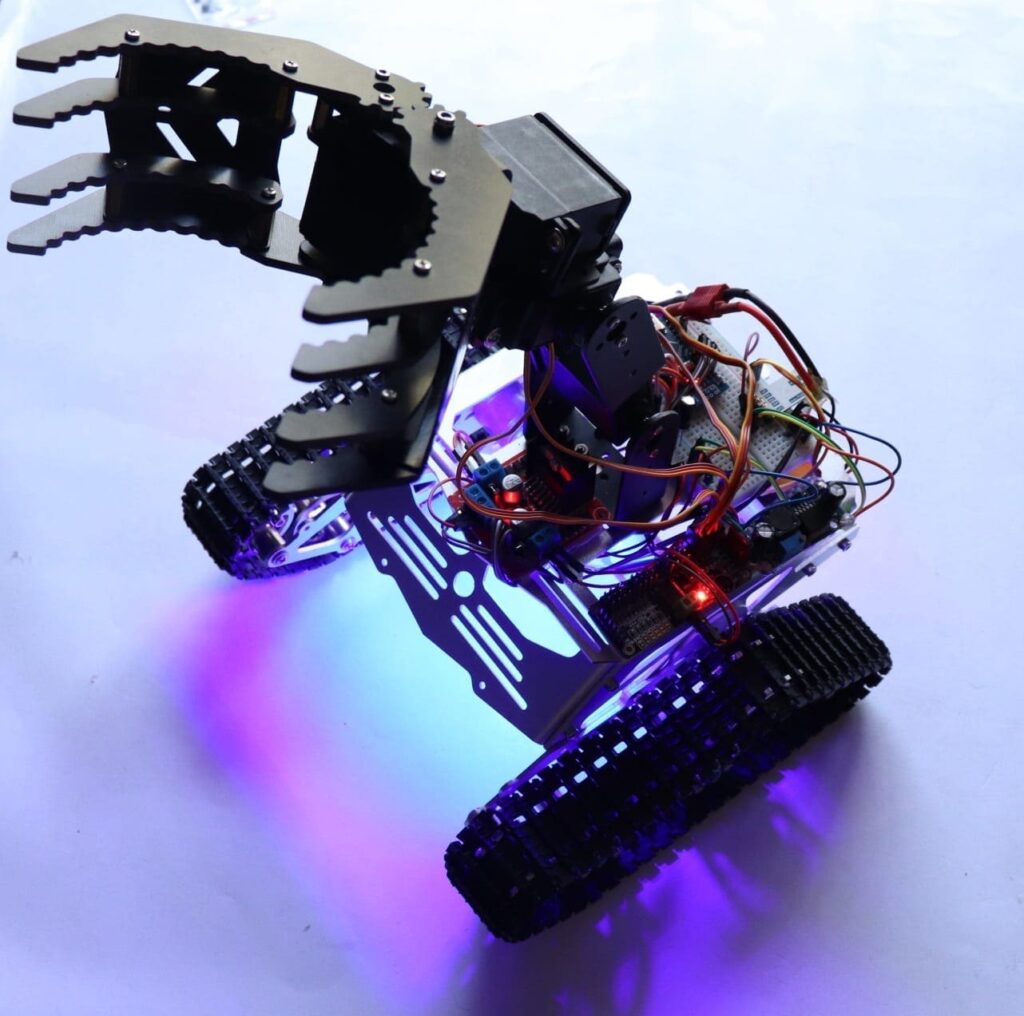
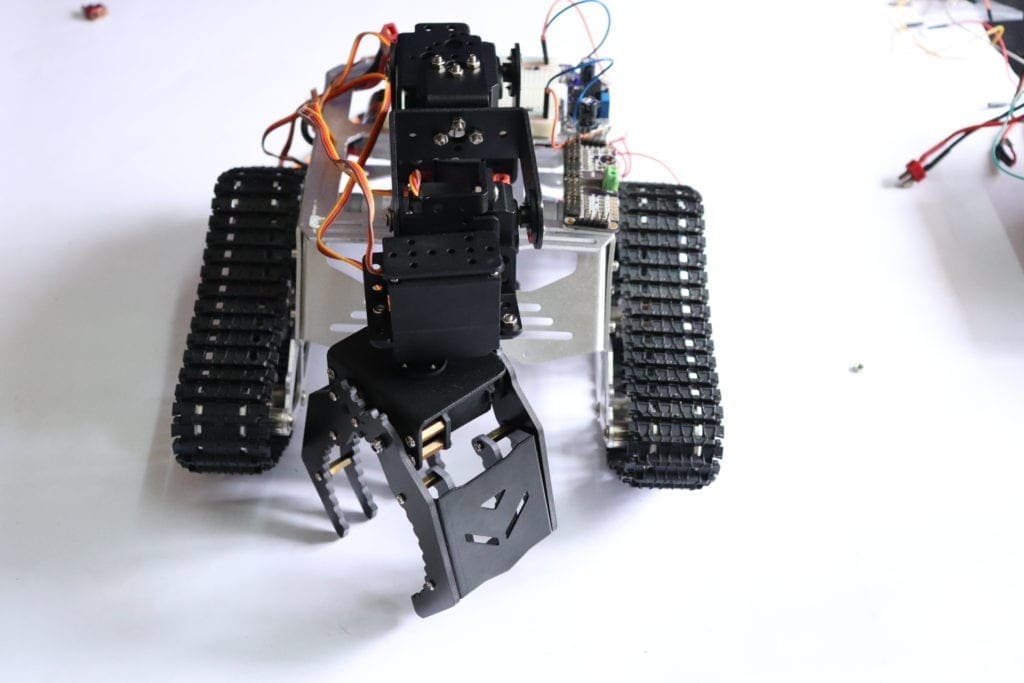
Ich hoffe, Sie haben den Einführungsteil des Spinel Crux L2 – Arduino Pick and Place Robot mit Roboterarm durchlaufen. Sieht unter glühenden Lichtern cool aus, oder? Warum nicht selbst einen bauen? Hier lernen wir, wie man einen Roboter baut und einen Roboterarm darüber anschließt und unseren eigenen DIY-Pick-and-Place-Roboter baut.
Wir stellen Ihnen das Design, den Code, die Schaltpläne und die Links zum Kauf Ihres eigenen Roboterarms, Roboterbausatzes, Fahrgestells und der in diesem Projekt verwendeten Sensormodule zur Verfügung.
Versuchen Sie, selbst eines zu erstellen, und wenn Sie mit dem Projekt nicht weiterkommen, können Sie uns jederzeit kontaktieren oder Ihre Fragen im Kommentarfeld oder in unserer WhatsApp-Gruppe stellen. Beginnen wir also ohne weiteres mit dem Projekt!
Arduino Pick und Ort Roboter Video Tutorial
Erste nehmen an der video der Pick und Ort Roboter wir gemacht haben.
Lassen Sie mich Ihnen zunächst ein wenig über die Komponenten erzählen, mit denen ich diesen Bestückungsroboter gebaut habe.
Arduino Pick & Place Roboter Komponenten benötigt
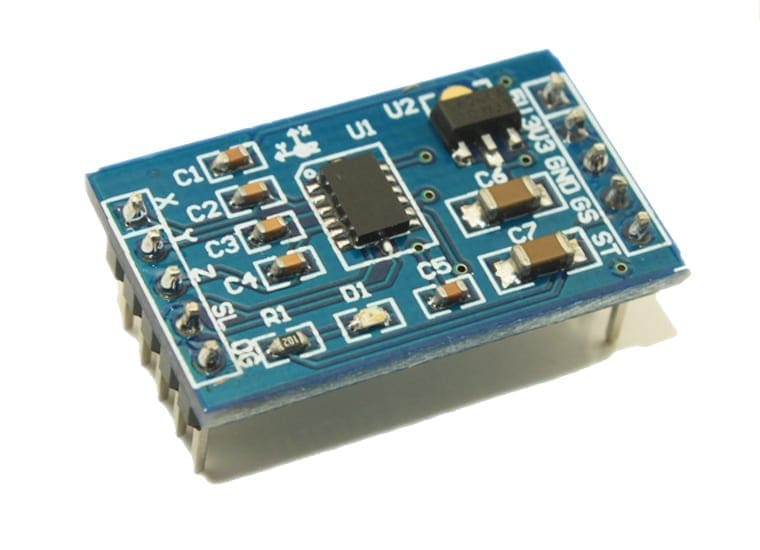
Ein Beschleunigungsmesser ist ein Sensor, der verwendet werden kann, um die Beschleunigung aufgrund der Schwerkraft auf verschiedene auf ein Objekt einwirkende Achsen zu erfassen. Damit können wir leicht die Neigung eines Objekts in Bezug auf den Boden berechnen. Wir werden unseren Spinell-Crux mit den analogen Werten der X- und Y-Neigung berechnen.
Hier verwende ich den MMA7361-Beschleunigungsmesser, um die Richtung unseres gestengesteuerten Roboters zu steuern. Der Grund, warum ich diesen Beschleunigungsmesser verwende, ist, dass wir diesem Beschleunigungsmesser sowohl 5 Volt als auch 3,3 Volt als Vcc zur Verfügung stellen können. da ich Arduino MKR1000 verwende, kann ich 3,3 Volt direkt vom Arduino anschließen. Es ist auch klein, sehr leicht und kann ohne große Komplikationen problemlos an Arduino und Raspberry Pi angeschlossen werden. wenn Sie möchten, können Sie diesen Beschleunigungsmesser zu einem günstigen Preis von kaufen banggood.com .
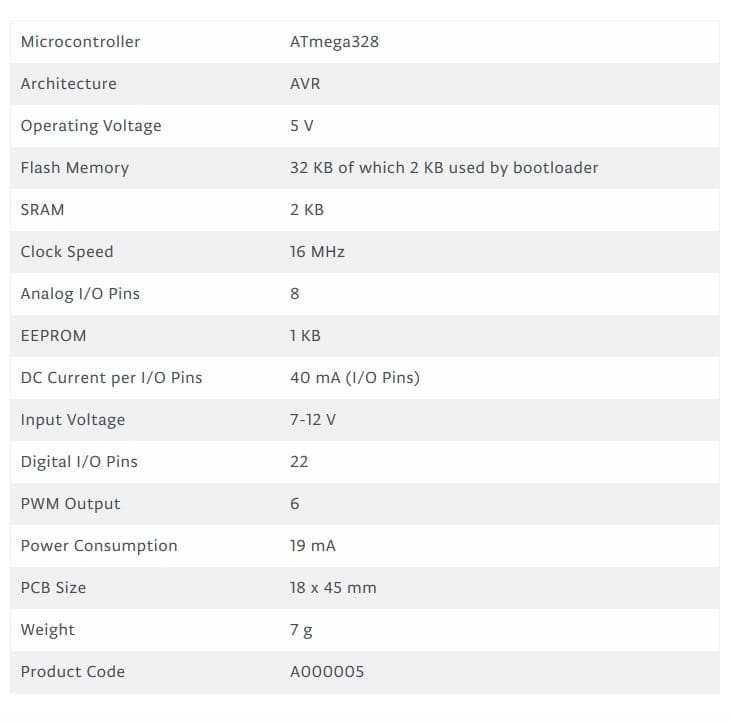
Arduino Nano
In diesem Projekt müssen wir zwei Micorcontroller verwenden – einen für den Controller, der alle Sensordaten sammelt und an das Funkmodul überträgt, und einen für den Roboter, der Daten vom Empfängermodul sammelt, verarbeitet und steuert Roboterarm und Bestückungsroboter. Der Arduino Nano ist sehr klein und kann einfach auf das Breadboard montiert werden. Diese kann leicht programmiert mit einem PC über USB mit Arduino IDE
Dieses board kann angetrieben mit die Mini USB port. Über Pin 30 können wir eine ungeregelte Spannungsquelle von 6 bis 20 V oder über Pin 27 eine geregelte Stromquelle von 5 V liefern.
Lernen Sie Arduino auf einfache Weise
Sind Sie neu bei Arduino? Möchten Sie Ihre Fähigkeiten in der Arduino-Programmierung verbessern? Sie sind an der richtigen Stelle. Wir haben ein komplettes Anfänger-Tutorial für Arduino, das alles von Grund auf abdeckt. In diesem kostenlosen Arduino-Tutorial für Anfänger werfen wir einen Blick auf die Einführung in die Arduino-Plattform, die ersten Schritte mit der Arduino-IDE, verschiedene Arten von Arduino-Boards und viele DIY-Projekte mit Arduino. Probieren Sie es aus!
Lets start learning Arduino
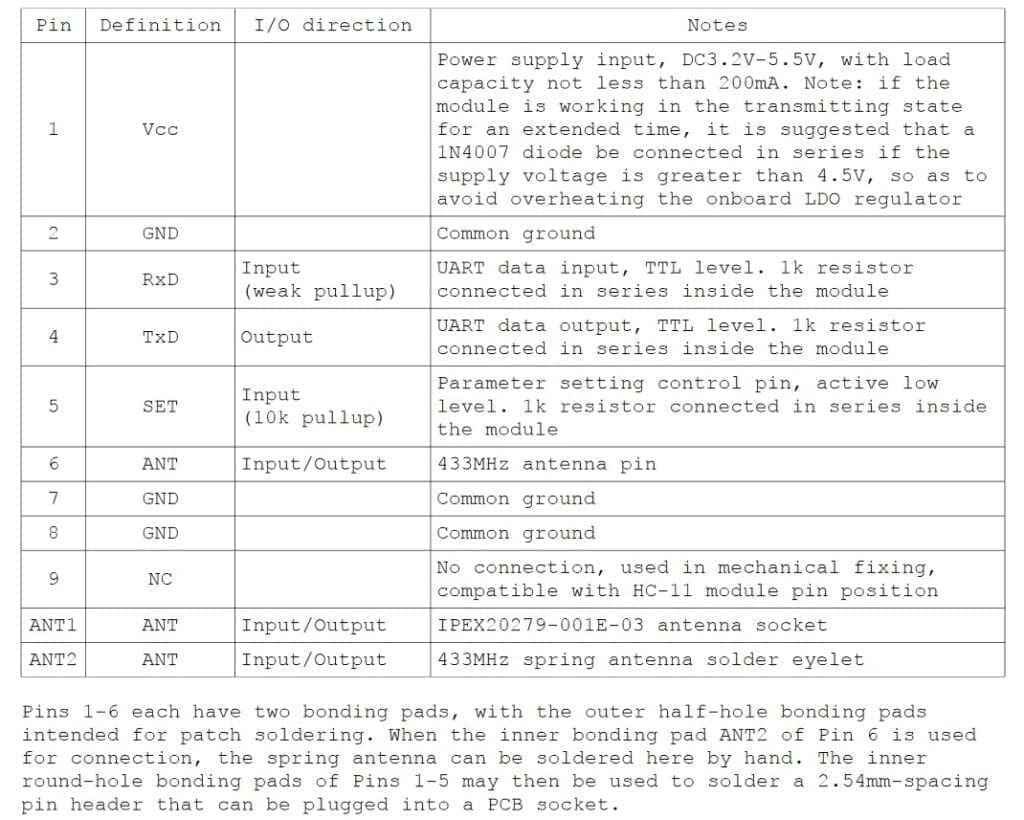
HC12
HC 12 ist ein wirklich günstiges Funkmodul mit großer Reichweite, das für die drahtlose serielle Kommunikation über eine große Entfernung von bis zu 1,7 KM verwendet werden kann. Das Modul ist sehr kompakt, leicht und Breadboard-freundlich, was es zum besten Wireless Controller für unser Projekt macht.

Pinbelegung
Testen der HC12-Verbindung
#include <SoftwareSerial.h>SoftwareSerial HC12(10, 11); // HC-12 TX Pin, HC-12 RX Pinvoid setup() {Serial.begin(9600); // Serial port to computerHC12.begin(9600); // Serial port to HC12}void loop() {while (HC12.available()) { // If HC-12 has dataSerial.write(HC12.read()); // Send the data to Serial monitor}while (Serial.available()) { // If Serial monitor has dataHC12.write(Serial.read()); // Send that data to HC-12}}
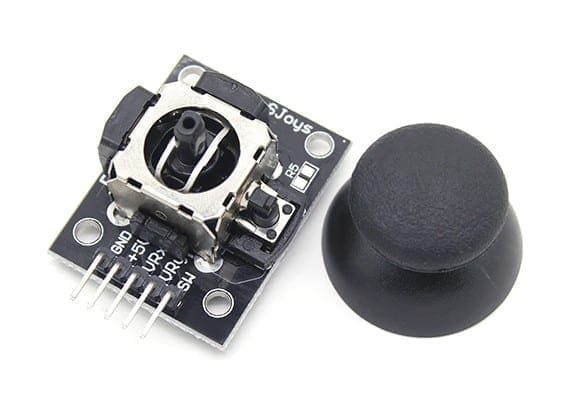
Joystick
Dies ist die am häufigsten verwendet robotic controller, die kommt mit verschiedenen roboter DIY roboter kit/roboter arm kit, dass ist gebaut, um mit arduino. Das Design ist recht einfach und sehr einfach zu bedienen. Es verwendet zwei Potentiometer, um die Bewegung in der x-Achse und der y-Achse zu berechnen, und einen Schalter, um den Tastendruck zu erfassen.
Dies kann einfach an die analogen Pins des Arduino angeschlossen werden und analoge Werte direkt lesen.
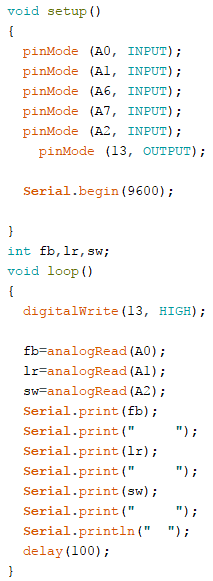
Download
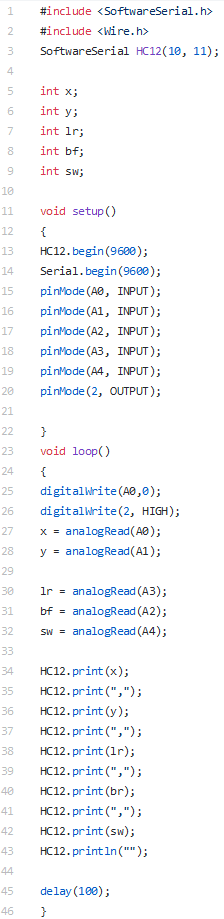
Vergewissern Sie sich vor dem Hochladen des Hauptcodes, dass Ihr Joystick mit diesem Code funktioniert. Laden Sie den Code über den obigen Link herunter. In diesem Beispiel sammeln wir einfach die analogen Datenausgänge vom Joystick mit den analogen Pins (A0, A1, A2) von Arduino. Diese Werte werden in den Variablen gespeichert und später auf dem seriellen Monitor gedruckt.
Wir werden diesen Beitrag in zwei Teile teilen
1- Pick-and-Place-Roboterfernbedienung
Der Sender besteht aus einem Steckbrett, in dem wir alle Sensoren und Komponenten montieren, um die Daten zu erhalten, die zum Ansteuern des Pick-and-Place-Roboters und des Roboterarms verwendet werden. Dazu gehören ein Beschleunigungsmesser, ein Joystick und ein HC12-Modul.
Wir werden den Beschleunigungsmesser verwenden, um den Roboterarm und den Joystick zu steuern, um den Roboter zu steuern. Im Moment werden wir die Joystick-Taste verwenden, um die Roboterhand zu schließen. Die Daten dieser Sensoren werden über ein HC12-Modul drahtlos an den DIY-Roboter übertragen.
2- Der Bestückungsroboter
Hier werde ich Ihnen sagen, wie man einen Roboterarm herstellt, einen Roboter baut und den Arm auf dem Roboter montiert. Sie lernen auch, wie Sie Arduino programmieren, um die Daten des drahtlosen Kommunikationsmoduls HC12 zu lesen, zu verarbeiten und den Roboterarm mit Arduino zusammen mit dem Roboter fernzusteuern.
Das Erlernen der DIY-Robotik war noch nie so EINFACH!
DIY Robotik ist eine lustige und einfache Sache, die Sie innerhalb weniger Minuten lernen können, wenn Sie eine richtige Anleitung haben. Möchten Sie Robotik lernen, wissen aber nicht, wo Sie anfangen sollen? Dann ist dies für Sie. Hier helfen wir Ihnen beim Einstieg in die DIY-Robotik mit leicht verständlichen, 100% KOSTENLOSEN Schritt-für-Schritt-Anleitungen, beginnend mit den Grundlagen der Robotik und den Teilen des Roboters. Hier finden Sie auch eine großartige Sammlung von Robotik-Projekt-Tutorials vom Anfänger bis zum Fortgeschrittenen, damit Sie mit DIY-Robotik beginnen können.
Start Learning Robotics
Teil 1 – Die Fernbedienung
Wie bereits erwähnt, ist dieser DIY-Roboter ein ferngesteuerter Roboter. Im Controller-Bereich haben wir also ein Steckbrett, einen Joystick – um die Bewegung des Roboters und das Schließen und Öffnen der Faust des Roboters zu steuern, einen Beschleunigungsmesser – um den Roboterarm zu bewegen, und ein Funkmodul, um diese Daten an den Roboter zu übertragen.
Verbindungen
Schließen Sie einfach alle Komponenten wie unten gezeigt an. Wir werden den Arduino mit einer 5V Power Bank versorgen und den 5 V Vout des Arduino verwenden, um alle anderen Module mit Strom zu versorgen.
Die fernbedienung PCB
In meinem vorherigen video, ICH zeigte, wie sie machen diese Drahtlose Fernbedienung für ihre RC Roboter mit einem breadboard beschleunigungsmesser, tasten, und eine HC12 drahtlose modul. Wenn Sie das noch nicht gesehen haben, sehen Sie sich bitte zuerst das folgende Video an. Weil wir diese Fernbedienung verwenden werden, um diesen Roboter zu steuern.
Grundsätzlich liest diese Fernbedienung analoge und digitale Daten von Sensoren wie Beschleunigungsmessern, Joysticks und speichert sie in separaten Variablen. Diese Variablen werden zu einer einzigen langen Zeichenfolge kombiniert und diese Zeichenfolge wird mit dem Funkmodul HC12 an unseren Roboter gesendet.
Zeichnen von Schaltplänen und PCB-Design mit Altium
Also habe ich Altium Designer verwendet, um die Schaltung zu zeichnen und die Leiterplatte zu entwerfen. Es ist ein leistungsstarkes Tool, mit dem Sie Ihre eigenen Leiterplatten für Ihr Projekt sowie komplexe und Multiplayer-Leiterplatten für den industriellen Einsatz entwerfen und erstellen können. Hier ist der Link zur Altium Testversion. Also stellen Sie sicher, dass Sie es überprüfen.
Schaltung
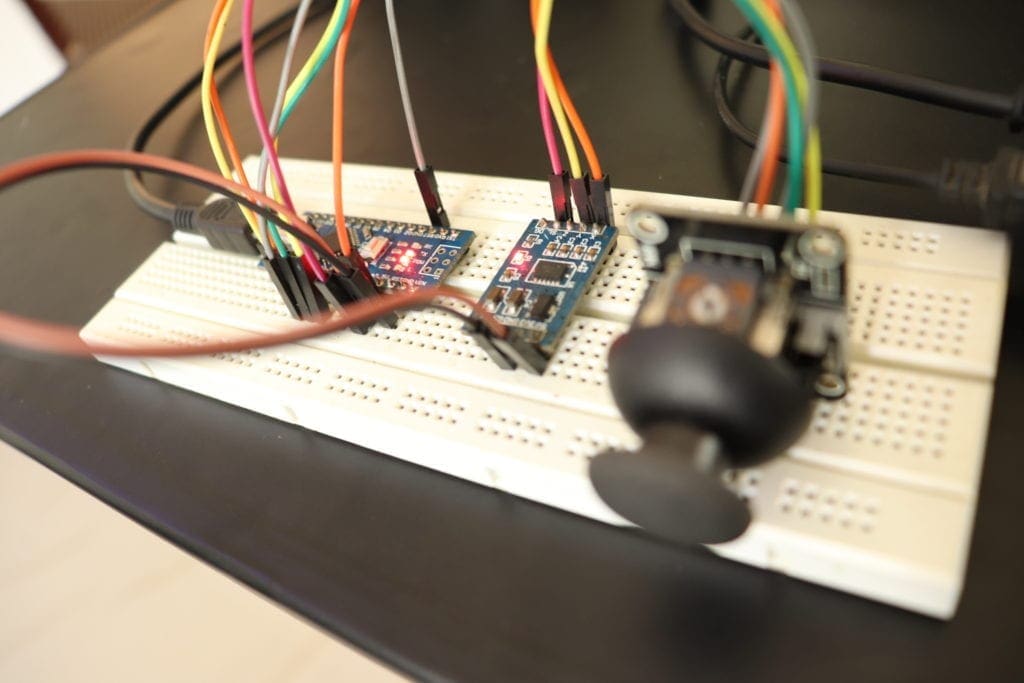
Ich habe eine Schaltung erstellt, die alle Komponenten enthält: die joystick, beschleunigungsmesser, arduino nano und hc12 modul verbunden die GPIO pin der arduino und montiert es auf eine breadboard.

Es funktionierte einwandfrei, aber das Problem war, das ganze Board sah wirklich chaotisch aus, mit all den Überbrückungskabeln, die hier und da gingen. Also entschied ich mich für PCB.
In der PCB-Version habe ich 4 Schalter hinzugefügt, die ich für das nächste Projekt verwenden werde.
Ich habe auch einen 7805-Regler hinzugefügt, der mir hilft, eine Eingangsspannung zwischen 7V und 35V bereitzustellen, sodass ich problemlos ein 5V-USB-Netzteil, einen 9V-Akku oder sogar einen 12V-Lipo-Akku verwenden kann. Ich habe auch einige Anzeige-LEDs hinzugefügt, die mich wissen lassen, wenn etwas nicht mehr funktioniert. Sie finden die Schaltung im folgenden Link.
Leiterplattenlayout
Altium PCB Designer kann auch zum Erstellen von Leiterplattenlayouts verwendet werden. Dies ist das Layout, das ich mit der Schaltung erstellt habe. Wie Sie sehen können, ist dies eine Dual-Layer-Leiterplatte, was bedeutet, dass das Routing auf beiden Seiten vorhanden ist – sowohl auf der Oberseite als auch auf der Unterseite.

Auf der linken Seite des Boards habe ich etwas Platz gelassen, um meine Batterien aufzubewahren, jetzt habe ich die Gerber-Datei bei mir. Alles, was ich tun musste, war die Platine zu bestellen.
Nachdem ich alle Komponenten erhalten hatte, lötete ich sie alle zusammen und dies ist meine endgültige Leiterplatte. Sie sehen, alle Komponenten sind jetzt mit der Platine verbunden.
int x;int y;int lr;int bf;int sw;void setup(){ Serial.begin(9600);pinMode(A0, INPUT);pinMode(A1, INPUT);pinMode(A2, INPUT);pinMode(A3, INPUT);pinMode(A4, INPUT);pinMode(2, OUTPUT);}void loop(){digitalWrite(A0,0);digitalWrite(2, HIGH);x = analogRead(A0);y = analogRead(A1);lr = analogRead(A2);bf = analogRead(A3);sw = analogRead(A4);Serial.print("Accelerometer");Serial.print("X = ");Serial.println(x);Serial.print("Y = ");Serial.println(y);Serial.println("");Serial.print("Joy Stick");Serial.println("");Serial.print("Left/Right = ");Serial.println(lr);Serial.print("Back/Forward = ");Serial.println(bf);Serial.print("Switch = ");Serial.println(sw);Serial.println("");Serial.println("");delay(250);}
Sobald dieser Code hochgeladen wurde, starten Sie den seriellen Monitor und prüfen Sie, ob alle diese Werte korrekt angezeigt werden.
Dann können Sie den echten Code unten hochladen.
Code
Laden Sie einfach den folgenden Code über den unten stehenden Download-Link herunter und laden Sie ihn auf Ihren Controller hoch.
Download
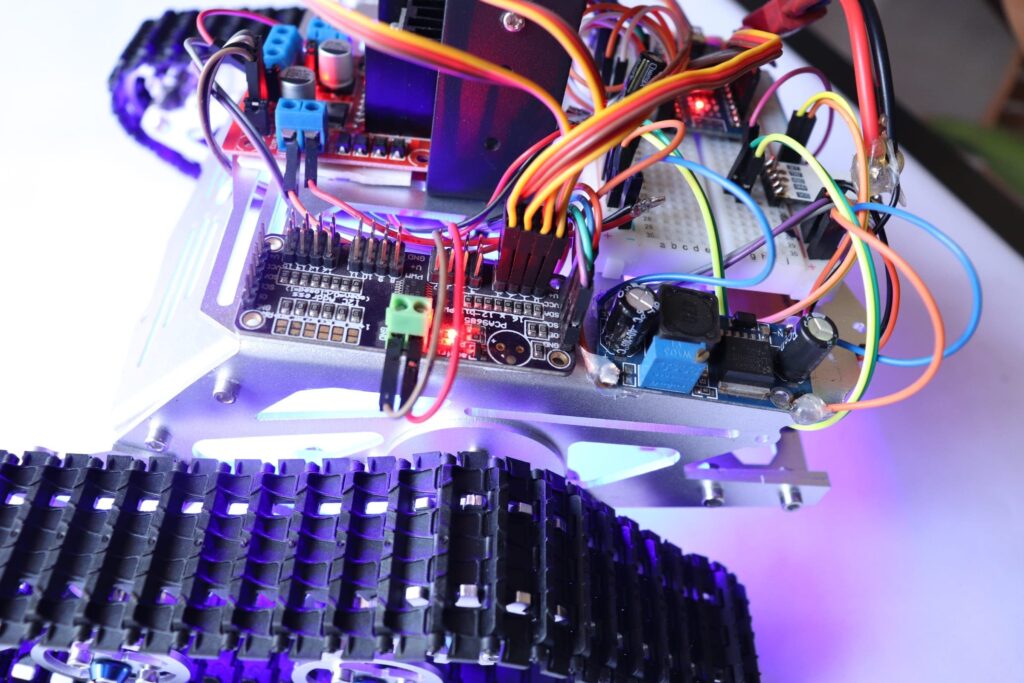
Teil 2 – Der Roboter
Der Hauptteil des Roboters ist das Chassis, in dem wir alle Komponenten einschließlich des Arms montieren.
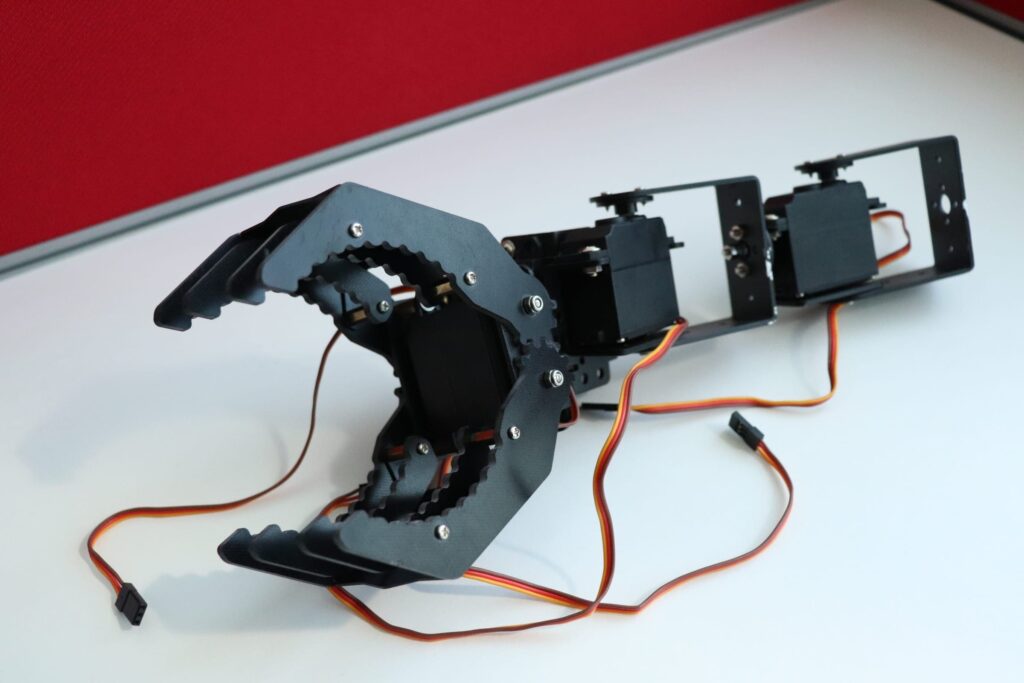
Ich habe das Roboterarm-Kit von banggood.com. Dieser Roboterarm besteht aus hochwertigem Aluminium und ist sehr leicht. Dieser hat so viele Befestigungspunkte, dass wir ihn an alle Roboterkörper / Chassis anschließen können, ohne Befestigungslöcher zu bohren.
Klicken Sie hier, um es zu überprüfen
Es gibt 4 Servomotoren, die dem Roboterarm insgesamt 3 Freiheitsgrade verleihen. Die servo motoren sind enthalten und die arbeits spannung ist 4,8-6V.
Sie können entweder kaufen diese zusammen mit die servo motor oder sie können kaufen sie separat.
Über das Chassis, das ich für die Herstellung dieses Bestückungsroboters verwendet habe, möchte ich sprechen. Ich habe dieses Kit banggood.com . Nicht nur diese, sie haben so viele arten von roboter rahmen, motoren und fast alle die sensoren für tun Arduino, raspberry pi und andere elektronik und hobby projekte. Sie erhalten all diese Dinge zu einem günstigen Preis mit wirklich schnellem und qualitativ hochwertigem Versand.
Und das Tolle an diesem Kit ist, dass sie alle Werkzeuge enthalten, die Sie benötigen, um den Rahmen zusammenzubauen.
Holen Sie sich Ihr DIY-Roboter-Kit von BangGood
Klicken Sie hier, um es auszuprobieren!!
Servo Motor Control
Die PCA9685 ist eine 16 Kanal 12 Bit PWM I2C-bus gesteuert Servo motor Fahrer. Der Treiber kann sehr einfach an Ihren Arduino, Raspberry Pie angeschlossen und einfach programmiert werden, um einzelne oder mehrere Servomotoren zu steuern und Ihr eigenes RC-Flugzeug, Auto, Schiff, Quadrapod, Hexapod oder alles, was Sie wollen, zu bauen.
Folgen Sie diesem Link, um mehr über den Servomotortreiber zu erfahren.
Pick-and-Place-Roboter – Anschlüsse
Hier wird ein 12-V-Netzteil für die Stromversorgung des gesamten Roboters verwendet. Wir feed die raw 12 Volt zu die LED und die motor fahrer IC spannung in für motor.
Dann wir verwenden eine regler zu schritt unten spannung zu 5 V und feed es zu Arduino, HC12 und Servo motor fahrer.
Sie können die Gleichstrommotoren mit einem guten Motortreiber-IC ansteuern. In diesem Projekt werde ich den Dual–H-Brückenmotortreiber IC – L293D verwenden, der zwei Servomotoren gleichzeitig steuern kann.
Weitere Informationen zum Ansteuern von Gleichstrommotoren mit dem L293D IC finden Sie hier. Wenn Sie neu in diesem Bereich sind, ist es besser, dies durchzugehen, bevor Sie mit dem nächsten Schritt fortfahren, um ein besseres Verständnis des Projekts zu erhalten.
Schließen Sie einfach alle Komponenten wie unten gezeigt an.
Wir werden den Arduino mit einer 5V-Powerbank versorgen und den 5 V-Vout des Arduino verwenden, um alle anderen Module mit Strom zu versorgen.
Arduino – Servo motor Driver
- 5 Vout – VCC Arduino
- Gnd – Gnd
- SDA – SDA
- SCL – SCL
Arduino – HC12
- 5 Vout – VCC Arduino
- Gnd – Gnd
- 10 – TX
- 11 – Rx
Servo motor Driver – Servo Motor
- Servo 1 – Port 000
- Servo 2 – Port 001
- Servo 3 – Port 002
- Servo 4 – Port 003
Arduino – L293D
- Pin 2 – Motor 1 A
- Pin 3 – Motor 1 B
- Pin 4-Motor 2 A
- Pin 5–Motor 2 B
L293D
Die H brücke funktioniert nur, wenn die Ermöglichen Pin ist set zu Logic 1
Eine sache zu halten in geist während mit diesem IC ist, es sind zwei pins wo wir haben zu liefern die eingang power. Pin 8 und Pin 16; beide sind für ganz unterschiedliche Zwecke. Pin 9 dient zum Ansteuern des Motors, der eine Spannung von 6 V bis 30 Volt verarbeiten kann, und Pin 16, der den IC für die interne Schaltung mit Strom versorgt. Unter keinen Umständen sollten Sie diese beiden Pins austauschen, da sonst der Chip durchbrennen kann.
Code
Laden sie einfach die unten code mit die download link unten und laden sie es zu sie DIY roboter und sie werden gut zu gehen.

Herunterladen
Lass uns fahren!!!
Sobald der Code auf Ihren Pick-and-Place-Roboter hochgeladen wurde, können Sie Ihren Roboter an eine 12-V-Stromquelle und Ihren Roboter-Wireless-Controller an eine 5-V-Stromquelle anschließen.
Jetzt sollten Sie in der Lage sein, den Roboter mit dem Wireless Controller fernzusteuern.
Dies ist nur ein Anfang. Wir, die RootSaid-Gruppe, arbeiten an einem drahtlosen Steuerungshandschuh, mit dem der gesamte Roboter einschließlich des Roboterarms gesteuert werden kann. Aber dieser Handschuh hat etwas Cooles.
Dieser Handschuh kann Handgesten OHNE Flexsensor erkennen. Ja, das hast du richtig gehört. Möchten Sie mehr erfahren? Sei ein Teil von RootSaid.
Abonnieren Sie die RootSaid-Website, indem Sie unten einfach Ihre E-Mail-ID eingeben. Sie erhalten eine Benachrichtigung, wenn das Tutorial verfügbar ist, an dem Sie basteln können.