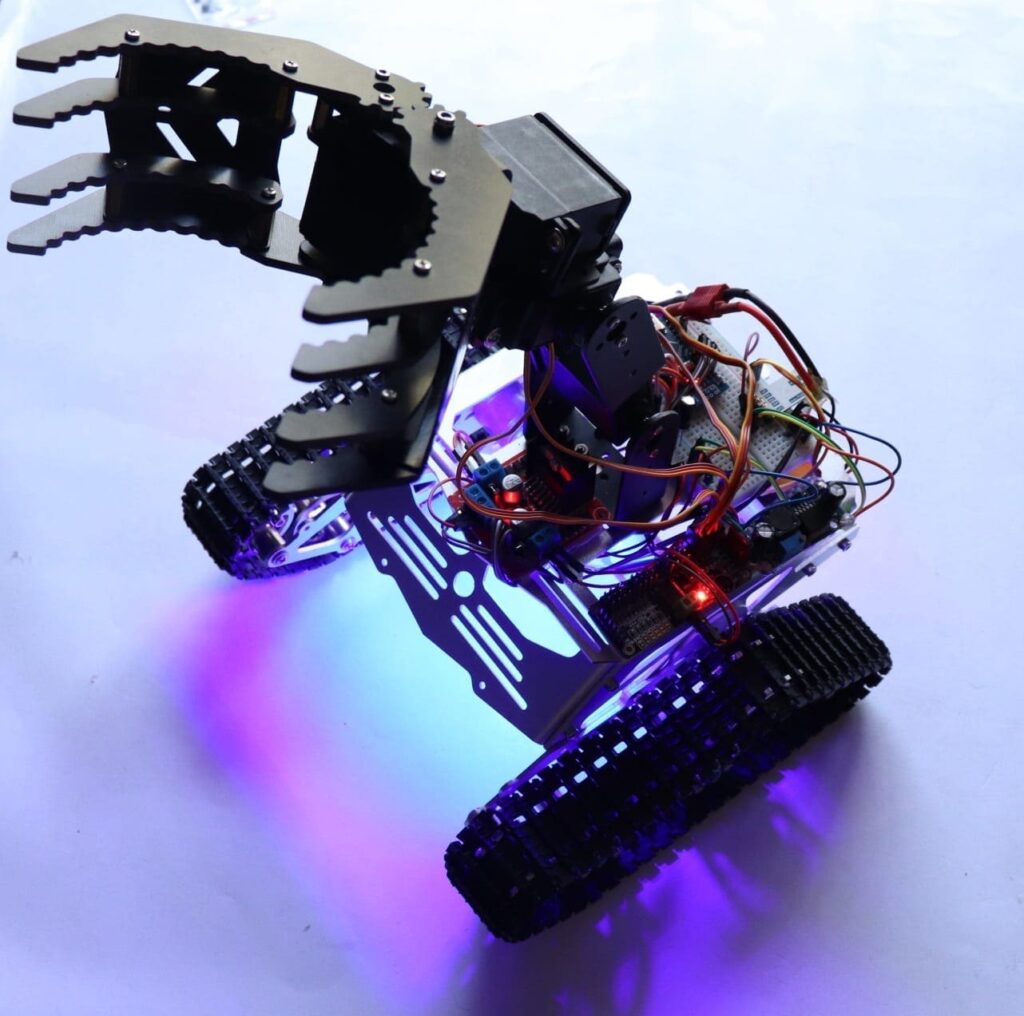
hoppas du har gått igenom introduktionsdelen av Spinel Crux L2 – Arduino Pick and Place Robot med robotarm. Ser cool under glödande ljus rätt? Varför inte bygga en själv? Här lär vi oss att bygga en robot och ansluta en robotarm ovanpå den och bygga vår egen DIY pick and place robot.
vi kommer att förse dig med design, kod, kretsscheman och länkar för att köpa din egen robotarm, robot kit, chassi och sensormoduler som används i detta projekt.
försök att göra en själv och om du fastnar i projektet kan du alltid kontakta oss eller ställa dina frågor i kommentarrutan eller i vår WhatsApp-grupp. Så utan vidare, låt komma igång med projektet!
Arduino Pick and Place Robot Video Tutorial
först ta på videon av Pick and Place Robot vi har gjort.
låt mig först berätta lite om de komponenter jag använde för att bygga denna pick and place robot.
Arduino Välj och placera Robotkomponenter som behövs
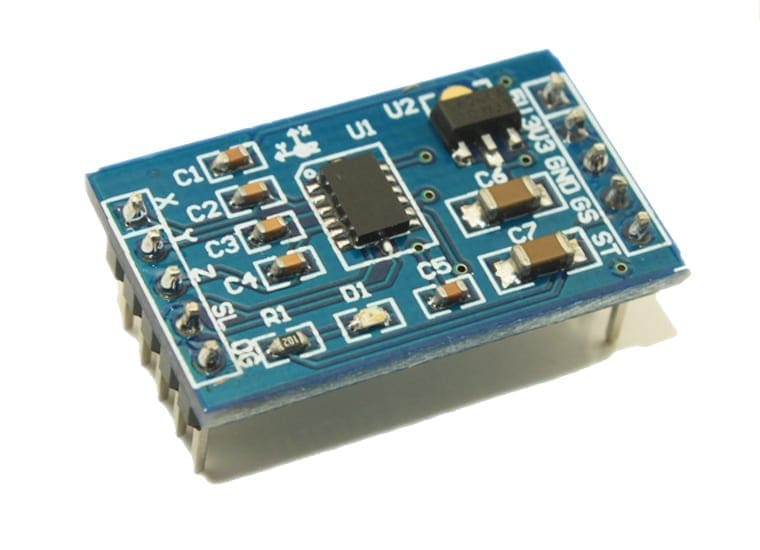
en accelerometer är en sensor som kan användas för att känna av accelerationen på grund av tyngdkraften på olika axlar som verkar på ett objekt. Med hjälp av detta kan vi enkelt beräkna lutningen på ett objekt med avseende på marken. Vi kommer att köra Vår Spinel Crux med X och Y tilt analoga värden.
här använder jag mma7361 accelerometer för att styra riktningen för vår geststyrda Robot; Du kan använda vilken accelerometer som helst som ger analoga värden i X-och Y-riktningen. Anledningen till att jag använder denna accelerometer är att vi kan tillhandahålla 5 volt samt 3,3 volt som Vcc till denna accelerometer. eftersom jag använder Arduino MKR1000 kan jag ansluta 3,3 Volt direkt från Arduino. Den är också liten mycket lätt och kan enkelt anslutas till Arduino och Raspberry Pi utan mycket komplikation. om du vill kan du köpa denna accelerometer till ett billigt pris från banggood.com.
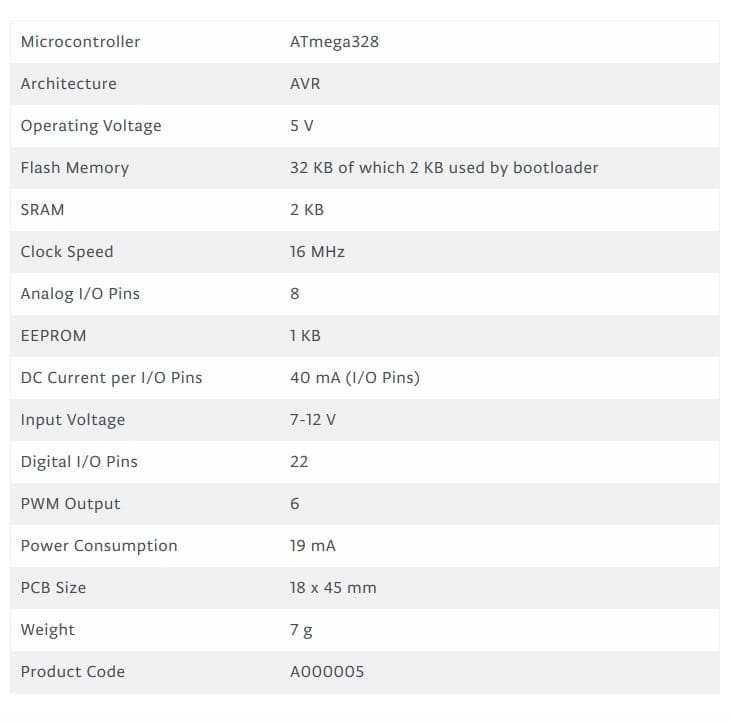
Arduino Nano
i detta projekt måste vi använda två micorcontroller – en för styrenheten som samlar alla sensordata och överför dem till den trådlösa modulen och en annan på roboten, som samlar in data från mottagarmodulen, bearbetar dem och kontrollerar robotarmen och pick and place-roboten. Arduino Nano är mycket liten och kan enkelt monteras ovanpå brödbrädet. Detta kan enkelt programmeras med en dator via USB med Arduino IDE
detta kort kan drivas med Mini USB-porten. Genom stift 30 kan vi leverera en oreglerad spänningskälla på 6 till 20V eller genom stift 27, vi kan tillhandahålla en reglerad strömkälla på 5V.
lär Arduino det enkla sättet
är du ny på Arduino? Vill du förbättra dina kunskaper i Arduino programmering? Du är på rätt plats. Vi har en komplett Nybörjarnivå handledning för Arduino som täcker allt från grunden. I denna gratis Arduino handledning för nybörjare guide, Vi kommer att ta en titt på Introduktion till Arduino plattform, komma igång med Arduino IDE, olika typer av Arduino styrelser, och en hel del DIY projekt med Arduino. Kolla in det!
Låt oss börja lära Arduino
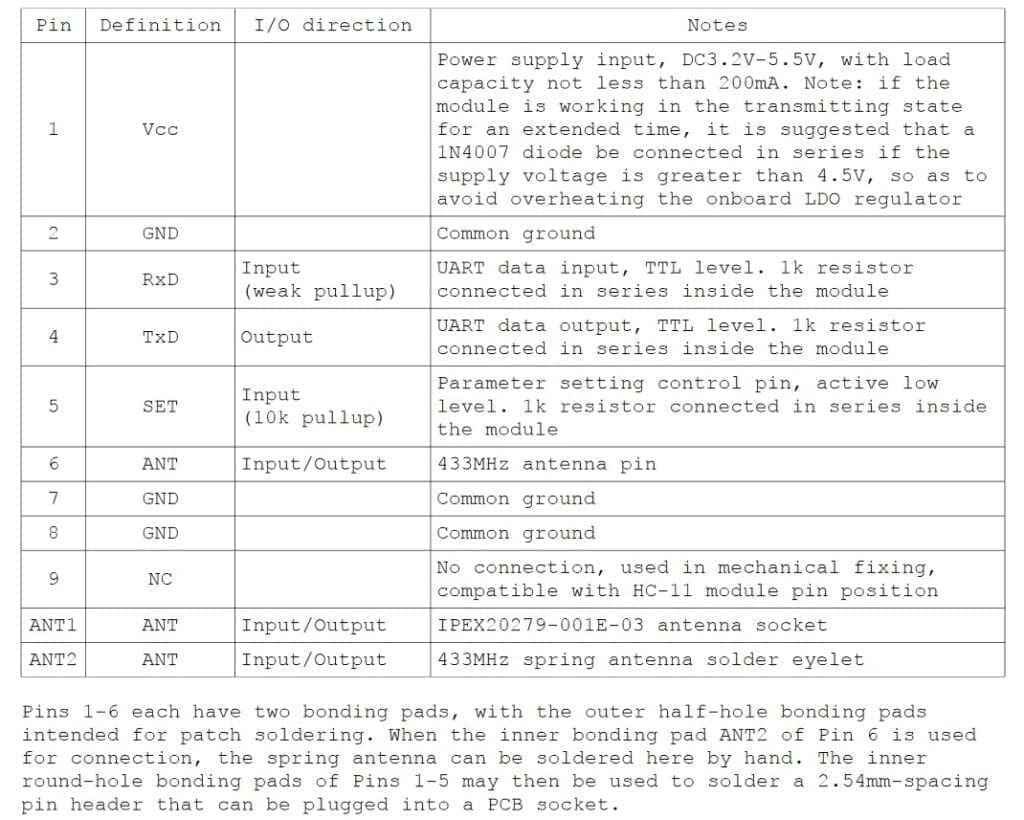
HC12
HC 12 är en riktigt billig långväga trådlös modul som kan användas för trådlös seriell kommunikation över en lång sträcka på upp till 1,7 KM. Modulen är riktigt kompakt lätt och breadboard-vänlig vilket gör detta till den bästa trådlösa handkontrollen för vårt projekt.

Pinout
testa HC12-anslutning
#include <SoftwareSerial.h>SoftwareSerial HC12(10, 11); // HC-12 TX Pin, HC-12 RX Pinvoid setup() {Serial.begin(9600); // Serial port to computerHC12.begin(9600); // Serial port to HC12}void loop() {while (HC12.available()) { // If HC-12 has dataSerial.write(HC12.read()); // Send the data to Serial monitor}while (Serial.available()) { // If Serial monitor has dataHC12.write(Serial.read()); // Send that data to HC-12}}
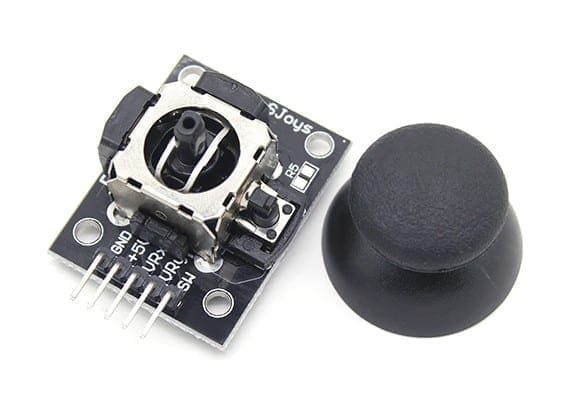
Joystick
Detta är den mest använda robotstyrenheten som levereras med olika robot DIY robot kit/robotarm kit som är byggd för att fungera med arduino. Designen är ganska enkel och är mycket lätt att använda. Den använder två potentiometrar för att beräkna rörelsen i x-axeln och y-axeln och en omkopplare för att känna av knapptrycket.
detta kan enkelt anslutas till Arduinos analoga stift och läsa analoga värden direkt.
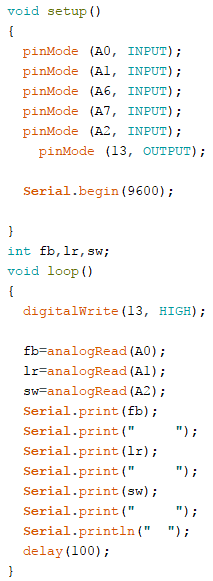
ladda ner
innan du laddar upp huvudkoden, se till att din joystick fungerar med den här koden. Ladda ner koden från ovanstående länk. I det här exemplet är det vi gör helt enkelt att samla in dataanaloga utgångar från joysticken med hjälp av de analoga stiften (A0, A1,A2) i arduino. Dessa värden lagras i variablerna och skrivs senare ut på seriemonitorn.
vi delar upp det här inlägget i två delar
1-Pick and Place Robot Remote Controller
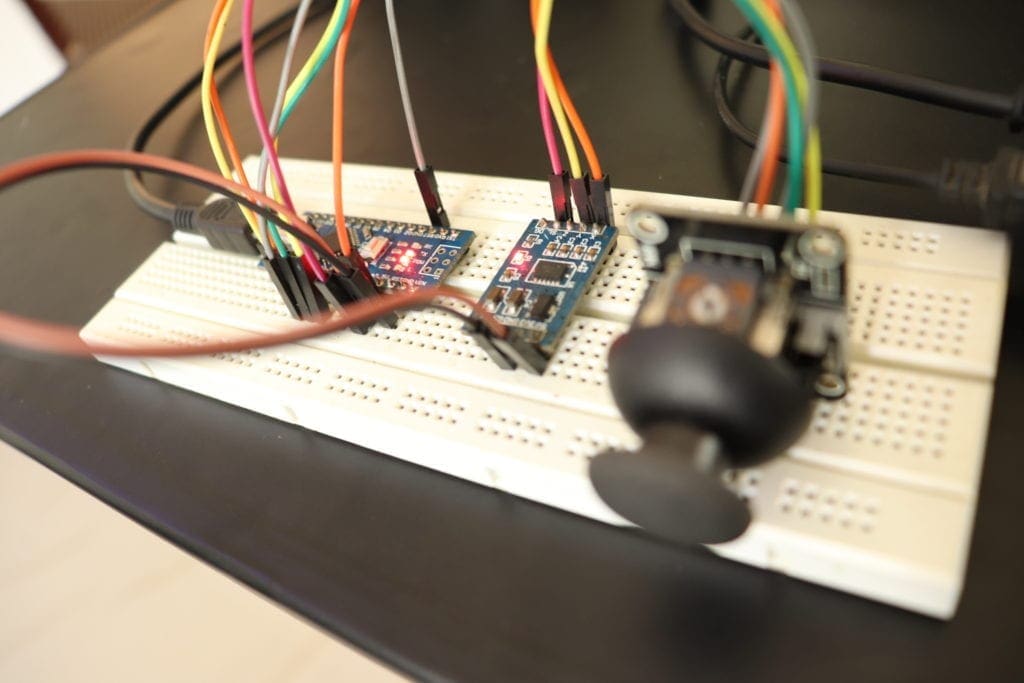
sändaren består av en brödbräda där vi monterar alla sensorer och komponenter för att få de data som används för att driva pick and place-roboten och robotarmen. Detta inkluderar en accelerometer, en joystick och en HC12-modul.
vi kommer att använda accelerometern för att styra robotarmen och joysticken för att styra roboten. För tillfället kommer vi att använda joystickknappen för att stänga robothanden. Data från dessa sensorer överförs trådlöst till DIY-roboten med en HC12-modul.
2-Välj och placera roboten
här kommer jag att berätta hur man gör en robotarm, bygger en robot och monterar armen ovanpå roboten. Du kommer också att lära dig hur du programmerar Arduino för att läsa data som kommer från den trådlösa kommunikationsmodulen – HC12, bearbeta den och hur man fjärrstyrer robotarmen med Arduino tillsammans med roboten.
lärande DIY Robotics har aldrig varit så enkelt!
DIY Robotics är en rolig och enkel sak du kan lära dig inom några minuter om du har en riktig guide. Vill du lära dig robotik men vet inte var du ska börja? Då är det här för dig. Här hjälper vi dig att komma igång med DIY Robotics med enkla att följa, 100% gratis, steg-för-steg-instruktioner från Robotics basics, delar av Robot, och sedan börjar vi kompletta steg-för-steg-handledning. Här hittar du också en fantastisk samling Robotikprojekthandledning från nybörjarnivå till avancerad för att du ska komma igång med DIY Robotics.
börja lära dig robotik
Del 1 – fjärrkontrollen
som tidigare nämnts är denna DIY-Robot en fjärrstyrd robot. Så i styrsektionen har vi en brödbräda, en joystick – för att styra robotens rörelse och stängning och öppning av robotens näve, en accelerometer – för att flytta robotarmen och en trådlös modul för att överföra dessa data till roboten.
anslutningar
Anslut bara alla komponenter som visas nedan. Vi kommer att driva Arduino med en 5V power bank och använda 5 V Vout av arduino för att driva upp alla andra moduler.
fjärrkontrollen PCB
i min tidigare video visade jag hur du gör den här trådlösa fjärrkontrollen till din RC-Robot med hjälp av en breadboard accelerometer, knappar och en HC12 trådlös modul. Om du inte har sett det ännu, se videon nedan först. Eftersom vi kommer att använda den fjärrkontrollen för att styra denna robot.
i grund och botten vad den här fjärrkontrollen gör är att den läser analoga och digitala data från sensorer som accelerometerknappar joystick och lagrar dem i separata variabler. Dessa variabler kommer att kombineras för att bilda en enda lång sträng och denna sträng kommer att skickas till vår robot med hjälp av HC12 trådlös modul.
Ritningsscheman och PCB-Design med Altium
så jag använde Altium Designer för att rita kretsen och designa PCB. Det är ett kraftfullt verktyg som kan användas för att designa och skapa egna PCB för ditt projekt samt komplexa och multiplayer PCB för industriellt bruk. Här är länken till Altium-testversionen. Så se till att du kolla in det.
krets
jag gjorde en krets som inkluderade alla komponenter: joysticken, accelerometern, arduino nano och hc12-modulen ansluten till GPIO-stiftet på arduino och monterade den på en brödbräda.

det fungerade felfritt men problemet var, hela styrelsen såg riktigt rörigt med alla bygeltrådar går här och där. Så jag bestämde mig för att gå med PCB.
i PCB-versionen lade jag till 4 växlar som jag kommer att använda för nästa projekt.
jag har också lagt till en 7805-regulator som hjälper mig att ge en ingångsspänning mellan 7V och 35V så att jag kan använda en 5V USB-strömförsörjning, 9V-batteri eller till och med 12 V Lipo-batteri utan några problem. Jag har också lagt till några indikatorlampor som låter mig veta om något slutade fungera. Du hittar kretsen i länken nedan.
PCB Layout
Altium PCB designer kan också användas för att göra PCB layout. Detta är layouten jag gjorde med hjälp av kretsen. Som du kan se är detta ett PCB med dubbla lager, vilket innebär att routing finns på båda sidor-såväl ovansidan som undersidan.

på vänster sida av brädet lämnade jag lite tomt utrymme för att hålla mina batterier nu har jag Gerber-filen med mig. Allt jag behövde göra var att beställa PCB.
när jag fick alla komponenter lödda jag dem alla tillsammans och det här är min sista PCB. Du ser, alla komponenter är anslutna till kortet nu.
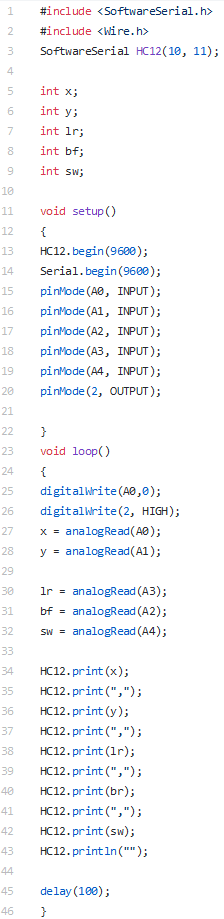
int x;int y;int lr;int bf;int sw;void setup(){ Serial.begin(9600);pinMode(A0, INPUT);pinMode(A1, INPUT);pinMode(A2, INPUT);pinMode(A3, INPUT);pinMode(A4, INPUT);pinMode(2, OUTPUT);}void loop(){digitalWrite(A0,0);digitalWrite(2, HIGH);x = analogRead(A0);y = analogRead(A1);lr = analogRead(A2);bf = analogRead(A3);sw = analogRead(A4);Serial.print("Accelerometer");Serial.print("X = ");Serial.println(x);Serial.print("Y = ");Serial.println(y);Serial.println("");Serial.print("Joy Stick");Serial.println("");Serial.print("Left/Right = ");Serial.println(lr);Serial.print("Back/Forward = ");Serial.println(bf);Serial.print("Switch = ");Serial.println(sw);Serial.println("");Serial.println("");delay(250);}
när denna kod har laddats upp startar du seriemonitorn och kontrollerar om alla dessa värden visas korrekt.
då kan du ladda upp den riktiga koden nedan.
kod
Hämta bara nedanstående kod med nedladdningslänken nedan och ladda upp den till din kontroller.
ladda ner
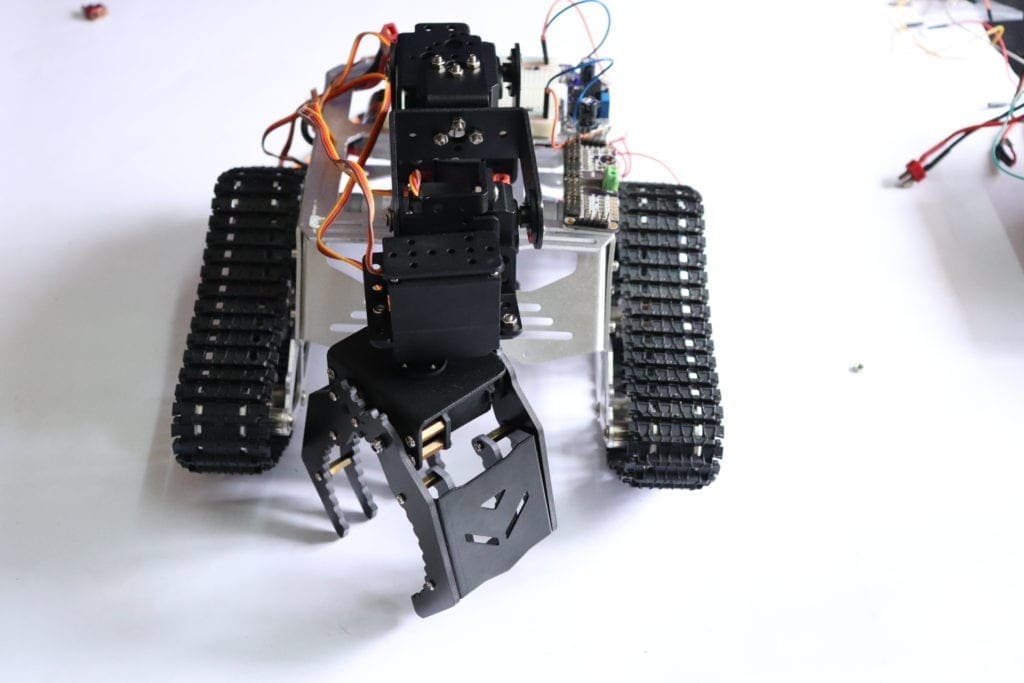
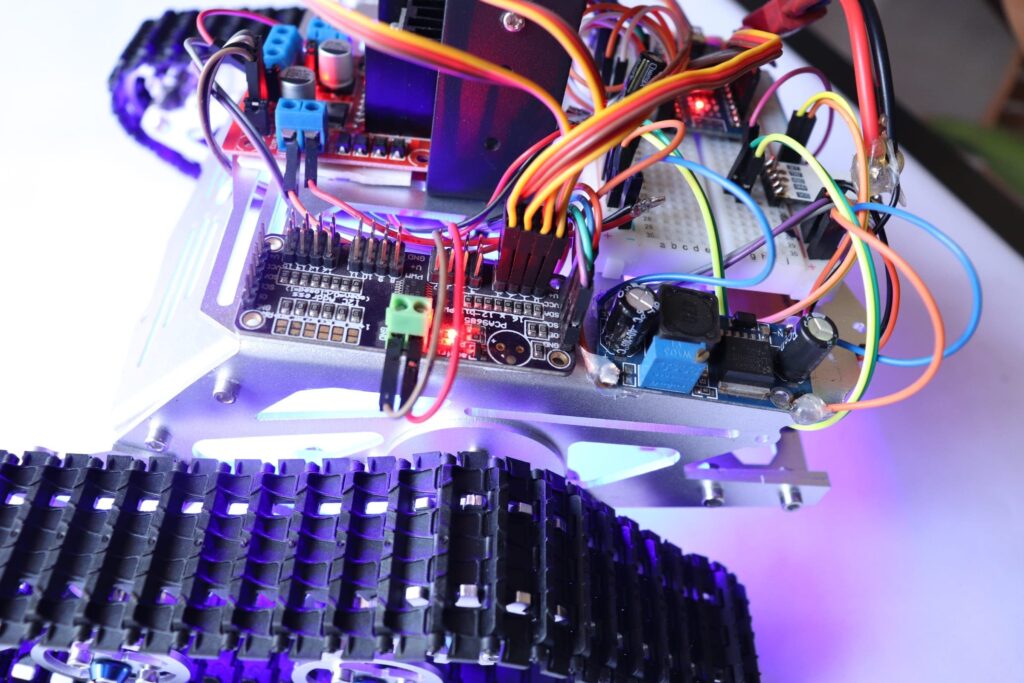
del 2-roboten
huvuddelen av roboten är chassit där vi monterar alla komponenter inklusive armen.
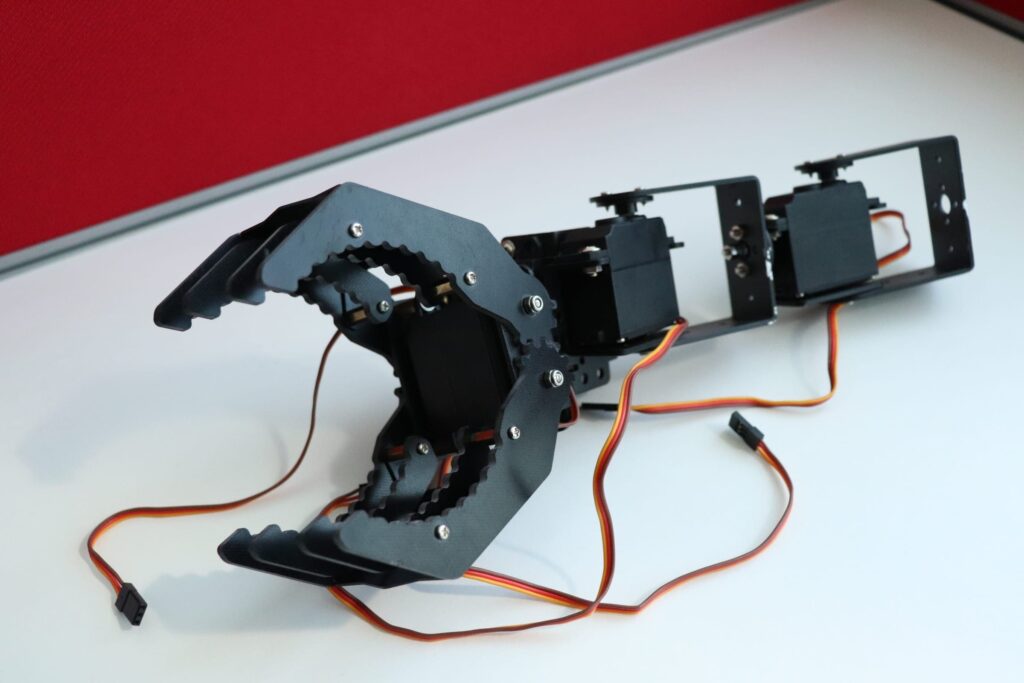
jag fick robotarmen kit från banggood.com. Denna robotarm är tillverkad av aluminium av god kvalitet och är verkligen lätt. Den här har så många monteringspunkter som gör att vi kan ansluta till alla robotkroppar/chassi utan att borra monteringshål.
Klicka här för att kolla in det
det finns 4 servomotorer som ger robotarmen totalt 3 frihetsgrader. Servomotorerna ingår och arbetsspänningen är 4,8-6V.
du kan antingen köpa detta tillsammans med servomotorn eller du kan köpa dem separat.
chassit jag använde för att göra denna pick and place robot är något jag skulle vilja prata om. Jag fick detta kit banggood.com. inte bara den här, de har så många typer av robotramar, motorer och nästan alla sensorer för att göra Arduino, raspberry pi och andra elektronik-och hobbyprojekt. Du får alla dessa saker till ett billigt pris med riktigt snabb och kvalitetsfrakt.
och det fantastiska med detta kit är att de ger alla verktyg du behöver för att montera ramen tillsammans.
få din DIY Robot Kit från BangGood
Klicka här för att kolla in det!!
Servomotorstyrning
PCA9685 är en 16-kanals 12-bitars PWM I2C-bussstyrd Servomotorförare. Föraren kan mycket enkelt anslutas till din arduino, Raspberry Pie och enkelt programmeras för att styra enstaka eller flera servomotorer och skapa ditt eget RC-plan, bil, skepp, quadrapod, hexapod eller vad du vill.
följ den här länken för att veta mer om servomotorföraren.
Välj och placera Robotanslutningar
här kommer vi att använda en 12 V strömförsörjning för att driva upp hela roboten. Vi matar den råa 12 Volt till LED och motordrivaren IC spänning för motor.
sedan använder vi en regulator för att sänka spänningen till 5V och mata den till Arduino, HC12 och servomotor.
du kan köra LIKSTRÖMSMOTORERNA med hjälp av en bra motordrivare IC. I detta projekt kommer jag att använda Dual H Bridge Motor Driver IC-L293D som kan styra två servomotorer åt gången.
för mer information om att köra likströmsmotorer med L293D IC klicka här. Om du är ny på detta är det bättre att gå igenom detta innan du fortsätter till nästa steg för att få en bättre förståelse för projektet.
Anslut bara alla komponenter som visas nedan.
vi kommer att driva Arduino med en 5V power bank och använda 5 V Vout av arduino för att driva upp alla andra moduler.
Arduino – Servo motor Driver
- 5 Vout – VCC Arduino
- Gnd – Gnd
- SDA – SDA
- SCL – SCL
Arduino – HC12
- 5 Vout – VCC Arduino
- Gnd – Gnd
- 10 – TX
- 11 – Rx
Servo motor Driver – Servo Motor
- Servo 1 – Port 000
- Servo 2 – Port 001
- Servo 3 – Port 002
- Servo 4 – Port 003
Arduino – L293D
- Pin 2 – Motor 1 A
- Pin 3 – Motor 1 B
- Stift 4 – Motor 2 a
- stift 5 – Motor 2 B
L293D
h-bron fungerar bara om Aktiveringsstiftet är inställt på logik 1
en sak att tänka på när du använder denna IC är att det finns två stift där vi måste leverera ingångseffekten. Stift 8 och stift 16; båda är för helt olika ändamål. Stift 9 är för att driva motorn som kan hantera en spänning på 6 V till 30 Volt och stift 16 som kommer att driva upp IC för den interna kretsen. Under inga omständigheter bör du inte byta ut dessa två stift, annars kan det brinna av chipet.
kod
ladda bara ned nedanstående kod med nedladdningslänken nedan och ladda upp den till dig DIY robot och du kommer att vara bra att gå.

ladda ner
låter rida!!!
när koden har laddats upp till din pick and place-robot kan du ansluta din robot till en 12 V strömkälla och din robot wireless controller till en 5V strömkälla.
nu ska du kunna styra roboten på distans med den trådlösa handkontrollen.
Detta är bara en början. Vi, RootSaid-gruppen arbetar med en trådlös kontrollhandske som kan användas för att styra hela roboten, inklusive robotarmen. Men det är något coolt med den här handsken.
denna handske kan upptäcka gester utan Flex sensor. Ja, du hörde rätt. Vill du veta mer? Var en del av RootSaid.
prenumerera RootSaid webbplats genom att helt enkelt ange din e-ID nedan. Du kommer att få meddelande när handledningen är tillgänglig för dig att tinker med.