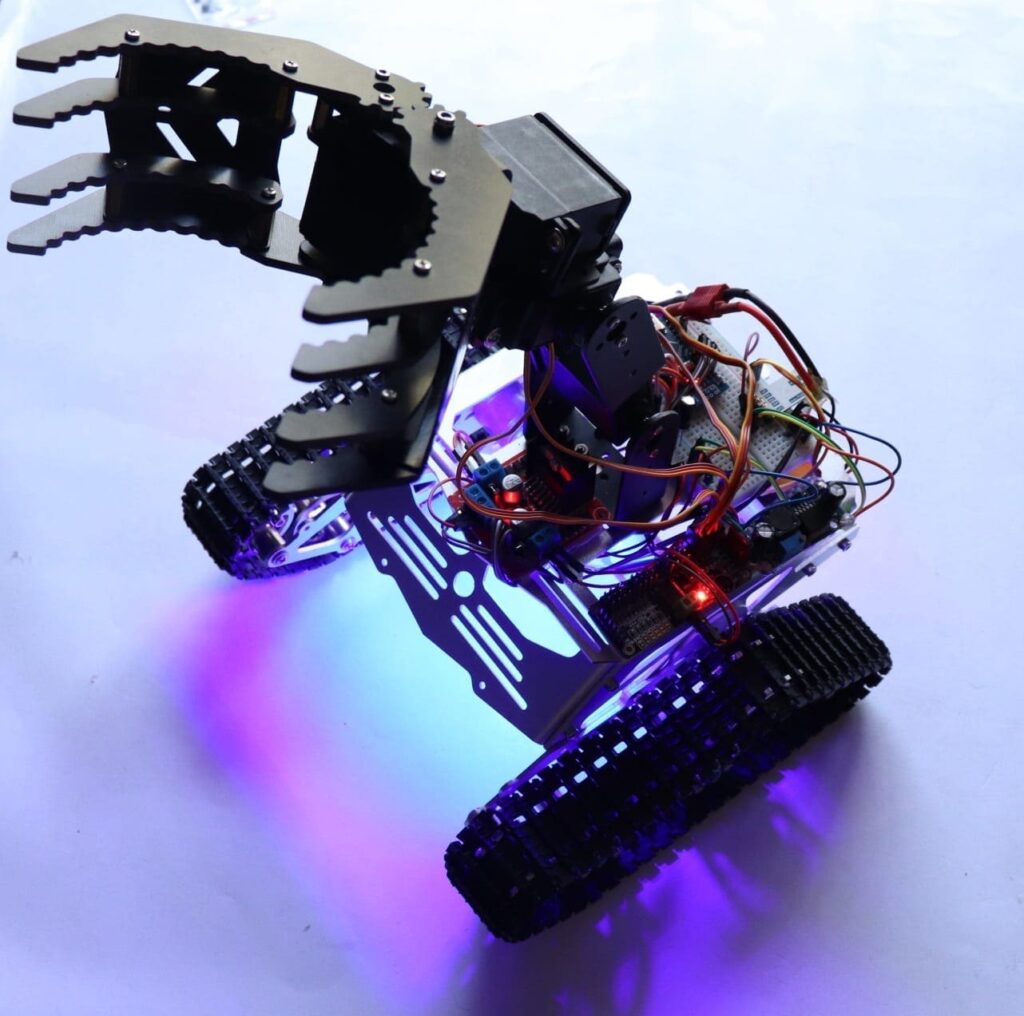
espero que você tenha passado pela parte de introdução do Spinel Crux L2 – Arduino Pick and Place Robot com braço robótico. Parece legal sob luzes brilhantes certo? Por que não construir um para você? Aqui, aprenderemos como construir um robô e conectar um braço robótico em cima dele e construir nosso próprio robô DIY pick and place.
forneceremos o design, o código, os diagramas de circuitos e os links para comprar seu próprio braço robótico, kit de robô, chassi e módulos de sensor usados neste projeto.
tente fazer um você mesmo e se você estiver preso com o projeto, você sempre pode entrar em contato conosco ou fazer suas perguntas na caixa de comentários ou em nosso grupo WhatsApp. Então, sem mais delongas, vamos começar com o projeto!
Arduino Pick and Place Robot Video Tutorial
primeiro pegue o vídeo do robô Pick and Place que fizemos.
Primeiro deixe-me contar um pouco sobre os componentes que eu usei para construir esta pick and place robô.
Arduino Pegar e Colocar Robô Componentes Necessários
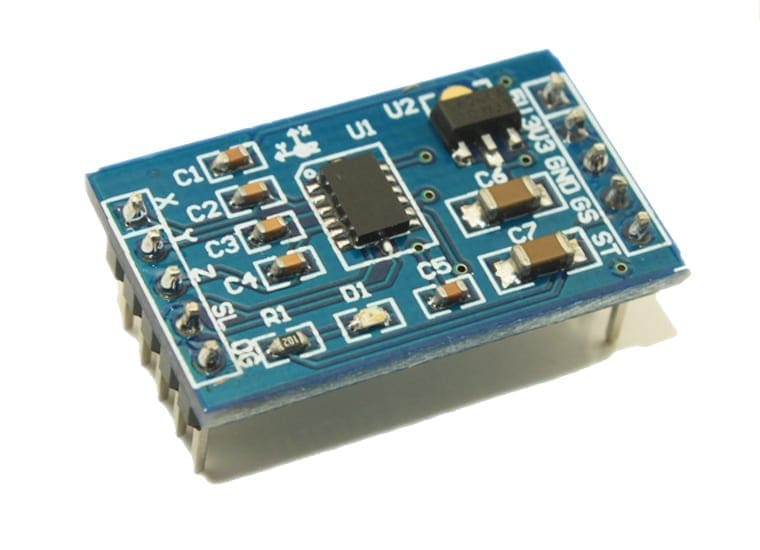
Um acelerômetro é um sensor que pode ser usado para detectar a aceleração devido à gravidade vários eixos que atuam sobre um objeto. Usando isso, podemos calcular facilmente a inclinação de um objeto em relação ao solo. Vamos dirigir nosso Spinel Crux usando os valores analógicos de inclinação X e Y.
aqui estou usando o acelerômetro MMA7361 para controlar a direção do nosso robô controlado por gestos; você pode usar qualquer acelerômetro que dará valores analógicos na direção X e Y. A razão pela qual estou usando este acelerômetro é que podemos fornecer 5 volts, bem como 3,3 volts como Vcc para este acelerômetro. como estou usando o Arduino MKR1000, posso conectar 3,3 volts diretamente do Arduino. Também é pequeno muito leve e pode ser facilmente conectado ao Arduino e Raspberry Pi sem muita complicação. se você quiser, pode comprar esse acelerômetro para um preço barato a partir de banggood.com.
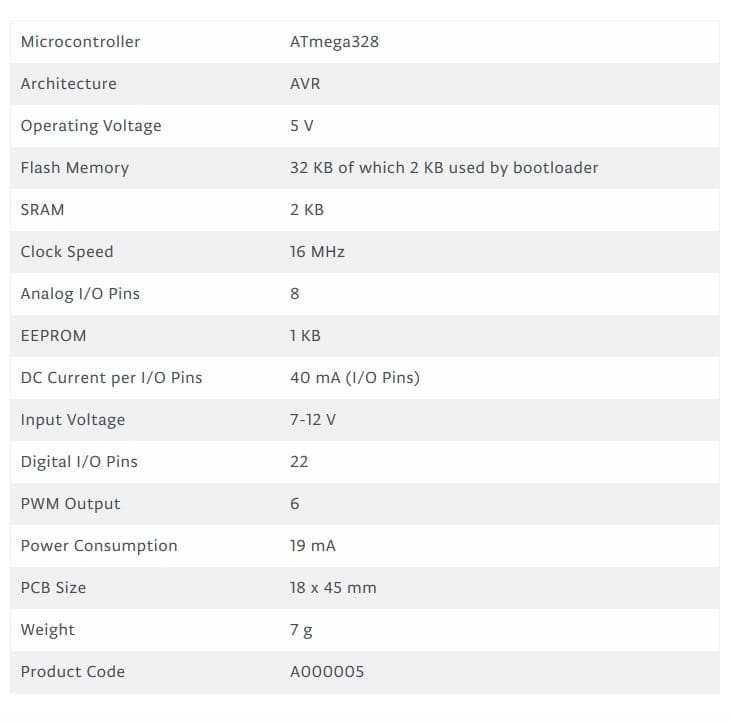
o Arduino Nano
neste projeto, vamos ter que usar dois micorcontroller – uma para o controlador, que vai reunir todos os dados do sensor e transmite-as para o módulo sem fio e outro sobre o robô, que vai reunir dados a partir do módulo receptor, processá-los e controle de um braço robótico e o pick and place robô. O Arduino Nano é muito pequeno e pode ser facilmente instalado em cima da placa de pão. Isso pode ser facilmente programado usando um PC via USB usando Arduino IDE
esta placa pode ser alimentada usando a porta Mini USB. Através do pino 30, podemos fornecer uma fonte de tensão não regulamentada de 6 a 20V ou através do pino 27, podemos fornecer uma fonte de energia regulada de 5V. a seleção de energia será feita automaticamente pela placa Nano.
aprenda Arduino da maneira fácil
você é novo no Arduino? Você quer melhorar suas habilidades em programação Arduino? Você está no lugar certo. Temos um tutorial completo de Nível iniciante para Arduino que cobre tudo do zero. Neste tutorial gratuito do Arduino para iniciantes, vamos dar uma olhada na introdução à plataforma Arduino, começando com o Arduino IDE, diferentes tipos de placas Arduino e muitos projetos DIY usando o Arduino. Vejam só!
Vamos começar a aprender Arduino
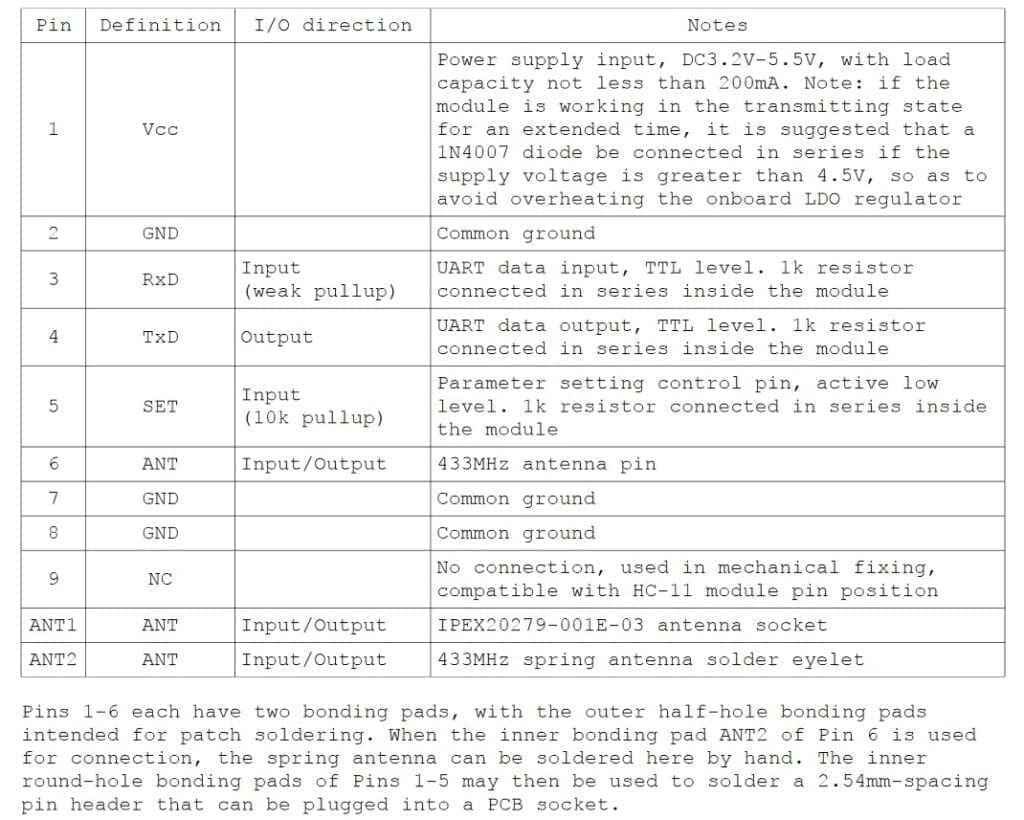
HC12
HC 12 é realmente um barato a longo-alcance sem fio módulo que pode ser usado para redes sem fio para comunicação serial através de uma longa distância de até 1,7 KM. O módulo é realmente compacto e leve, o que torna este o melhor controlador sem fio para o nosso projeto.

Pinagem
o Teste de Conexão HC12
#include <SoftwareSerial.h>SoftwareSerial HC12(10, 11); // HC-12 TX Pin, HC-12 RX Pinvoid setup() {Serial.begin(9600); // Serial port to computerHC12.begin(9600); // Serial port to HC12}void loop() {while (HC12.available()) { // If HC-12 has dataSerial.write(HC12.read()); // Send the data to Serial monitor}while (Serial.available()) { // If Serial monitor has dataHC12.write(Serial.read()); // Send that data to HC-12}}
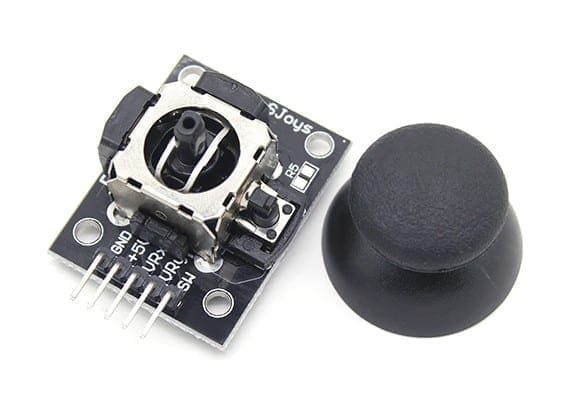
Joystick
Este é o mais amplamente utilizado robótica controlador, que vem com várias faça você mesmo um robô robô kit/braço de robô kit que é construído para trabalhar com o arduino. O design é bastante simples e é muito fácil de usar. Ele usa dois potenciômetros para calcular o movimento no eixo x e no eixo y e um interruptor para sentir a pressão do botão.
isso pode ser facilmente conectado aos pinos analógicos do arduino e ler valores analógicos diretamente.
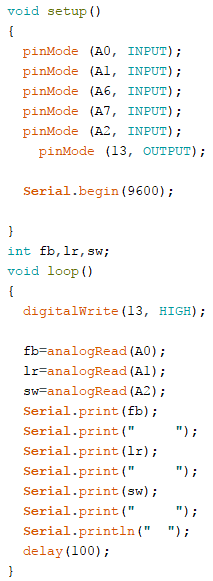
baixe
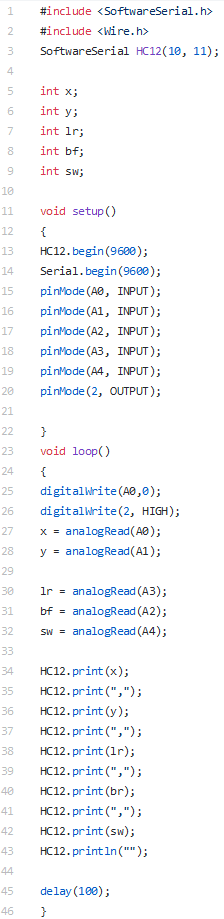
Antes de enviar o código principal, verifique se o joystick funciona usando este código. Baixe o código no link acima. Neste exemplo, o que estamos fazendo é simplesmente coletar as saídas analógicas de dados do Joystick usando os pinos analógicos (A0,A1, A2) do arduino. Esses valores são armazenados nas variáveis e posteriormente impressos no monitor serial.
Vamos dividir este post em duas partes
1 – Pegar e Colocar Robô Controlador Remoto
O Transmissor consiste de uma placa de montagem na qual podemos montar todos os sensores e componentes para obter os dados que é usado para conduzir a pegar e colocar robô e o braço robótico. Isso inclui um acelerômetro, um joystick e um módulo HC12.
usaremos o acelerômetro para controlar o braço robótico e o joystick para controlar o robô. Por enquanto, usaremos o botão joystick para fechar a mão robótica. Os dados desses sensores são transmitidos sem fio para o robô DIY usando um módulo HC12.
2 – O Pegar e Colocar Robô
Aqui, vou dizer-lhe como fazer um braço robótico, construir um robô e montar o braço em cima do robô. Você também aprenderá a programar o Arduino para ler os dados provenientes do módulo de comunicação sem fio – HC12, processá-lo e como controlar remotamente o braço robótico com o Arduino junto com o robô.Aprender Robótica DIY nunca foi tão fácil!
DIY Robotics é uma coisa divertida e fácil que você pode aprender em questão de minutos se tiver um guia adequado. Você quer aprender robótica, mas não sabe por onde começar? Então isto é para ti. Aqui, vamos ajudá-lo a começar com a Robótica DIY com instruções passo a passo fáceis de seguir, 100% gratuitas, a partir do básico da Robótica, partes do robô e, em seguida, iniciaremos os tutoriais passo a passo completos. Aqui você também encontrará uma incrível coleção de tutoriais de projetos de Robótica, do nível iniciante ao avançado, para você começar a usar a Robótica DIY.
Começar a Aprender Robótica
Parte 1 – O Controlador Remoto
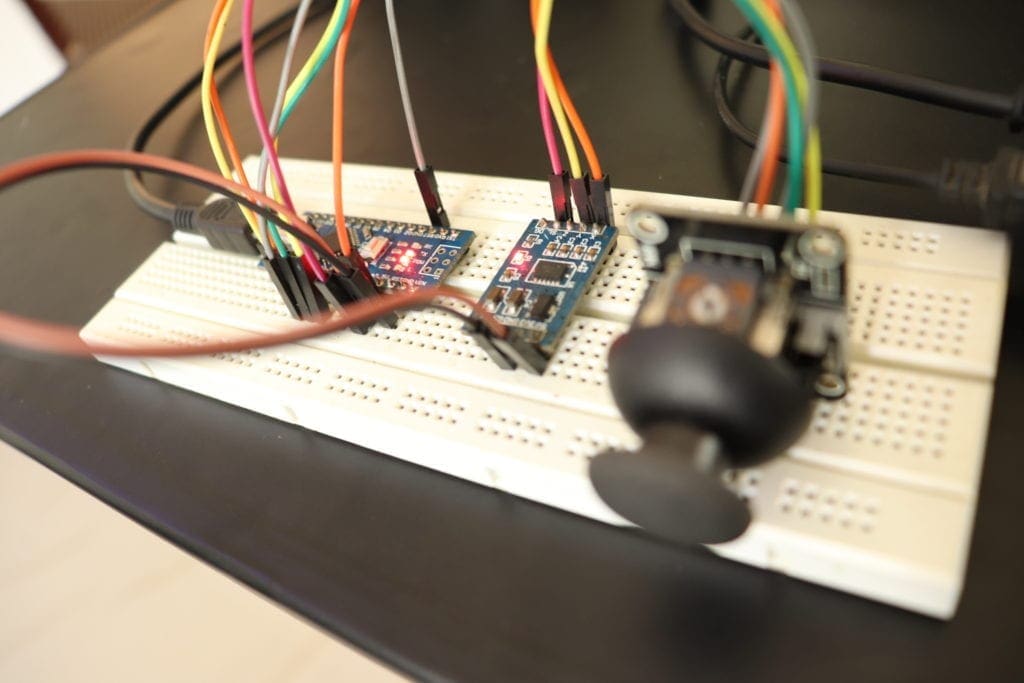
Como mencionado anteriormente, este DIY Robô é um robô controlado remotamente. Assim, na secção controlador, temos uma protoboard, um joystick para controlar o movimento do robô e o fechamento e a abertura do punho do robô, um acelerômetro para mover o braço robótico, e um módulo sem fio para transmitir os dados para o robô.
ligações
basta conectar todos os componentes como mostrado abaixo. Vamos alimentar o Arduino com um banco de potência de 5V e usar a saída de 5 V do arduino para alimentar todos os outros módulos.
O controlador remoto PCB
no meu vídeo anterior, mostrei como você faz este Controle Remoto Sem Fio para o seu Robô RC usando um acelerômetro de tábua de pão, botões e um módulo sem fio HC12. Se você ainda não viu isso, veja primeiro o vídeo abaixo. Porque vamos usar esse controle remoto para controlar este robô.
basicamente o que este controle remoto faz é, ele lê dados analógicos e digitais de sensores como o joystick dos botões do acelerômetro e os armazena em variáveis separadas. Essas variáveis serão combinadas para formar uma única string longa e essa string será enviada ao nosso robô usando o módulo sem fio HC12.
Desenho de Esquemas e Desenho de PCB usando Altium
Então eu usei Altium Designer para desenhar o circuito e o design do PCB. É uma ferramenta poderosa que pode ser usada para projetar e criar seus próprios PCBs para o seu projeto, bem como PCBs complexos e multiplayer para uso industrial. Aqui está o link para a versão de teste Altium. Portanto, certifique-se de verificar isso.
circuito
fiz um circuito que incluía todos os componentes: o joystick, acelerômetro, arduino nano e hc12 módulo conectado ao pino GPIO do arduino e montado em uma tábua de pão.

funcionou perfeitamente, mas o problema era que toda a placa parecia muito bagunçada com todos os fios de jumper indo aqui e ali. Então eu decidi ir com PCB.
na versão PCB, adicionei 4 switches que usarei para o próximo projeto.
também adicionei um regulador 7805 que me ajudará a fornecer uma tensão de entrada entre 7V e 35V para que eu possa usar uma fonte de alimentação USB de 5V, Bateria de 9V ou até Bateria Lipo de 12 V sem problemas. Também adicionei alguns LEDs indicadores que me informarão se algo parou de funcionar. Você encontrará o circuito no link abaixo.
Layout PCB
Altium PCB designer também pode ser usado para fazer layout PCB. Este é o layout que fiz usando o circuito. Como você pode ver, este é um PCB de camada dupla, o que significa que o roteamento está lá em ambos os lados – o lado superior e o lado inferior.

no lado esquerdo da placa, deixei algum espaço vazio para manter minhas baterias agora tenho o arquivo Gerber comigo. Tudo o que eu tinha que fazer era pedir o PCB.
uma vez que eu tenho todos os componentes, Eu soldou todos eles juntos e este é o meu PCB final. Você vê, todos os componentes estão conectados à placa agora.
int x;int y;int lr;int bf;int sw;void setup(){ Serial.begin(9600);pinMode(A0, INPUT);pinMode(A1, INPUT);pinMode(A2, INPUT);pinMode(A3, INPUT);pinMode(A4, INPUT);pinMode(2, OUTPUT);}void loop(){digitalWrite(A0,0);digitalWrite(2, HIGH);x = analogRead(A0);y = analogRead(A1);lr = analogRead(A2);bf = analogRead(A3);sw = analogRead(A4);Serial.print("Accelerometer");Serial.print("X = ");Serial.println(x);Serial.print("Y = ");Serial.println(y);Serial.println("");Serial.print("Joy Stick");Serial.println("");Serial.print("Left/Right = ");Serial.println(lr);Serial.print("Back/Forward = ");Serial.println(bf);Serial.print("Switch = ");Serial.println(sw);Serial.println("");Serial.println("");delay(250);}
assim que este código for carregado, Inicie o monitor serial e verifique se todos esses valores são mostrados corretamente.
então você pode carregar o código Real abaixo.
Código
basta baixar o código abaixo usando o link de download abaixo e enviá-lo para o seu controlador.
Baixar
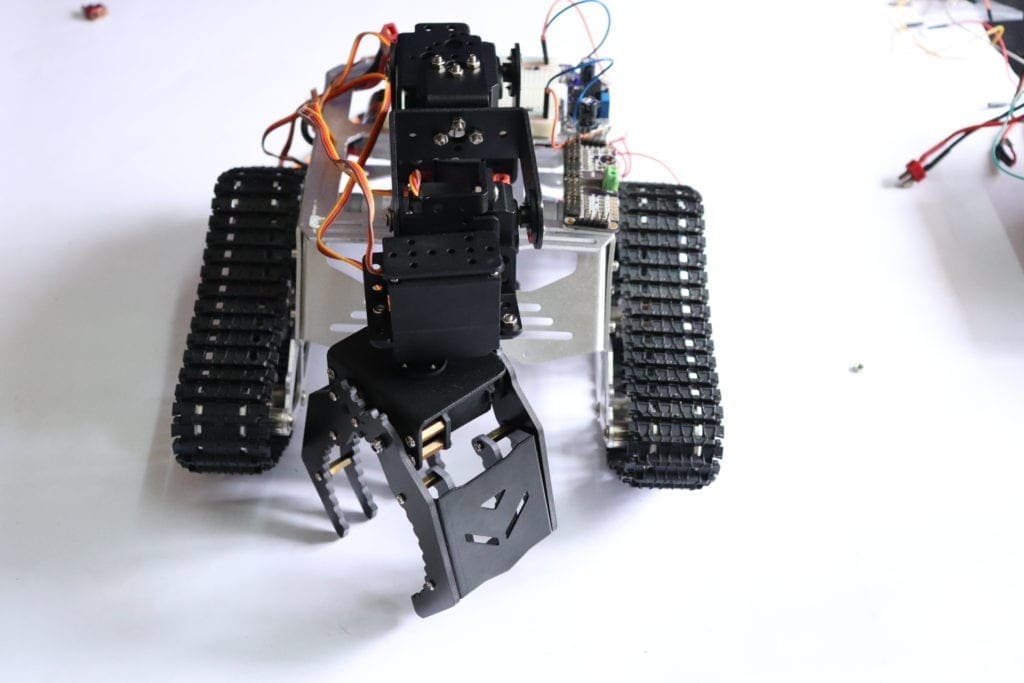
Parte 2 -O Robô
A parte principal do robô é o chassi em que nós montagem de todos os componentes, incluindo o braço.
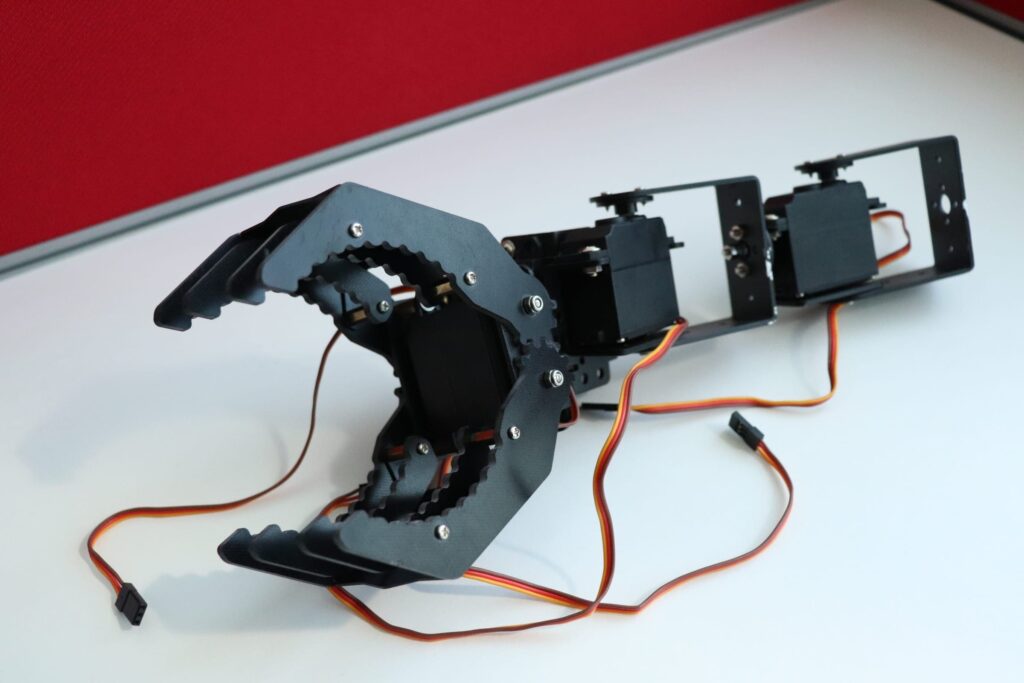
eu tenho o kit braço robótico de banggood.com. Este braço robótico é feito de alumínio de boa qualidade e é realmente leve. Este tem tantos pontos de montagem que nos permitirão conectar a qualquer corpo/chassi de robô sem perfurar furos de montagem.
Clique aqui para saber mais
Há 4 servo-motores que vai dar o braço robótico de um total de 3 Graus de Liberdade. Os servo motores estão incluídos e a tensão de trabalho é 4.8-6V.
você pode comprar isso junto com o servo motor ou você pode comprá-los separadamente.
o chassi que usei para fazer este robô pick and place é algo sobre o qual gostaria de falar. Eu tenho este kit banggood.com. não só este, eles têm tantos tipos de quadros de robôs, motores e quase todos os sensores para fazer Arduino, raspberry pi e outros projetos eletrônicos e hobby. Você receberá todas essas coisas por um preço barato com envio muito rápido e de qualidade.
e a grande coisa sobre este kit é que eles fornecem todas as ferramentas que você precisa para montar o quadro juntos.
Obtenha seu kit de robô DIY da BangGood
Clique aqui para conferir!!
controle do Servo Motor
o PCA9685 é um 16 Canal 12 Bit PWM I2C-bus controlado servo motor Driver. O motorista pode facilmente conectado ao seu arduino, Torta De Framboesa e facilmente programado para controlar servo motores únicos ou múltiplos e fazer seu próprio avião RC, carro, navio, quadrapod, hexapod ou qualquer coisa que você quiser.
siga este link para saber mais sobre o motorista do servo motor.
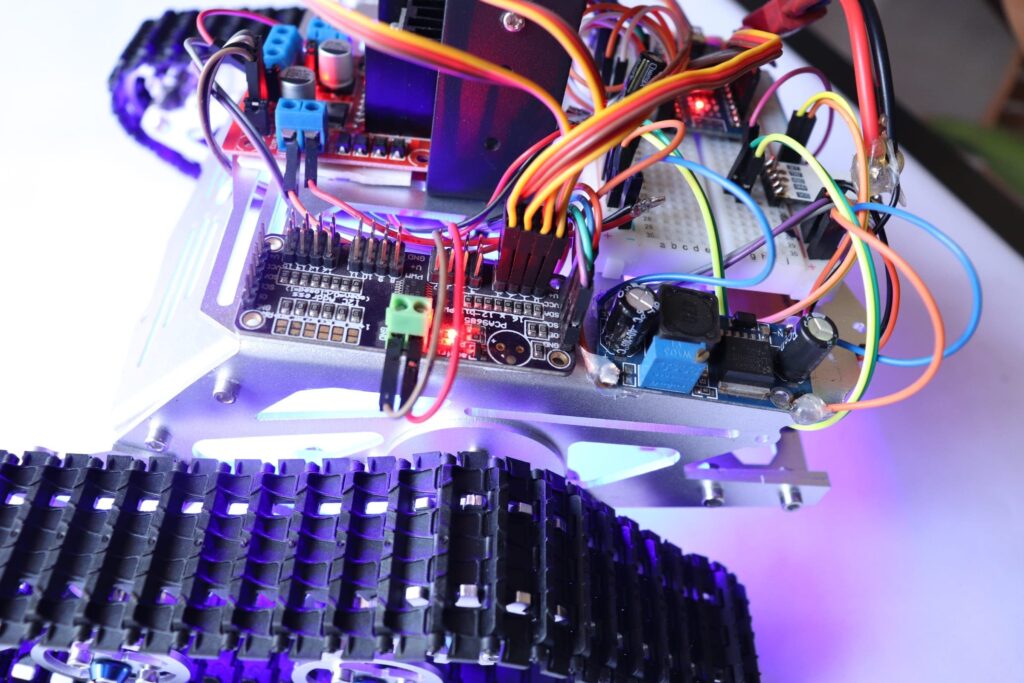
Pick and Place Robot-Connections
aqui estaremos usando uma fonte de alimentação de 12 V para alimentar todo o robô. Nós alimentamos os 12 volts crus ao diodo emissor de luz e à tensão do motorista IC do motor dentro para o motor.
então usamos um regulador para diminuir a tensão para 5V e alimentá-lo para Arduino, HC12 e driver de Servo motor.
você pode dirigir os motores DC usando um bom Driver de motor IC. Neste projeto, eu estarei usando o motorista duplo IC – L293D do motor da Ponte de H que pode controlar dois servo motores de cada vez.
para mais detalhes sobre a condução de motores DC usando L293D IC Clique aqui. Se você é novo nisso, é melhor passar por isso antes de prosseguir para a próxima etapa para obter uma melhor compreensão do projeto.
Basta conectar todos os componentes, como mostrado abaixo.
estaremos alimentando o Arduino com um banco de potência de 5V e usaremos a saída de 5 V do arduino para alimentar todos os outros módulos.
Arduino – Servo motor Driver
- 5 Vout – VCC Arduino
- Gnd – Gnd
- SDA – SDA
- SCL – SCL
Arduino – HC12
- 5 Vout – VCC Arduino
- Gnd – Gnd
- 10 – TX
- 11 – Rx
Servo motor Driver – Servo Motor
- Servo 1 – Port 000
- Servo 2 – Port 001
- Servo 3 – Port 002
- Servo 4 – Port 003
Arduino – L293D
- Pin 2 – Motor 1 A
- Pin 3 – Motor 1 B
- Pin 4 – Motor de 2 A
- Pin 5 – Motor 2 B
L293D
H ponte irá funcionar apenas se o Ativar Pin está definido para Lógica 1
Uma coisa a ter em mente ao utilizar este IC é, existem dois pinos onde nós temos que fornecer a potência de entrada. Pino 8 e pino 16; ambos são para fins totalmente diferentes. O pino 9 é para conduzir o motor que pode segurar uma tensão de 6 V a 30 volts e o pino 16 que ligará acima o IC para o circuito interno. Sob nenhuma circunstância, você não deve trocar esses dois pinos ou pode queimar o chip.
Código
basta baixar o código abaixo usando o link de download abaixo e enviá-lo para você robô DIY e você vai ser bom para ir.

Baixar
Permite que Passeio!!!
uma vez que o código é carregado para o seu robô pick and place, você pode conectar seu robô a uma fonte de energia de 12 V e seu controlador sem fio robô a uma fonte de energia de 5V.
Agora você deve ser capaz de controlar o robô remotamente usando o controlador sem fio.
este é apenas um começo. Nós, o Grupo RootSaid, estamos trabalhando em uma luva de controle sem fio que pode ser usada para controlar todo o robô, incluindo o braço robótico. Mas há algo legal nessa luva.
esta luva pode detectar gestos com as mãos sem Sensor Flex. Sim, ouviste bem. Quer saber mais? Faça parte do RootSaid.
Inscreva-se no site da RootSaid simplesmente inserindo seu ID de E-mail abaixo. Você receberá uma notificação sempre que o tutorial estiver disponível para você mexer.