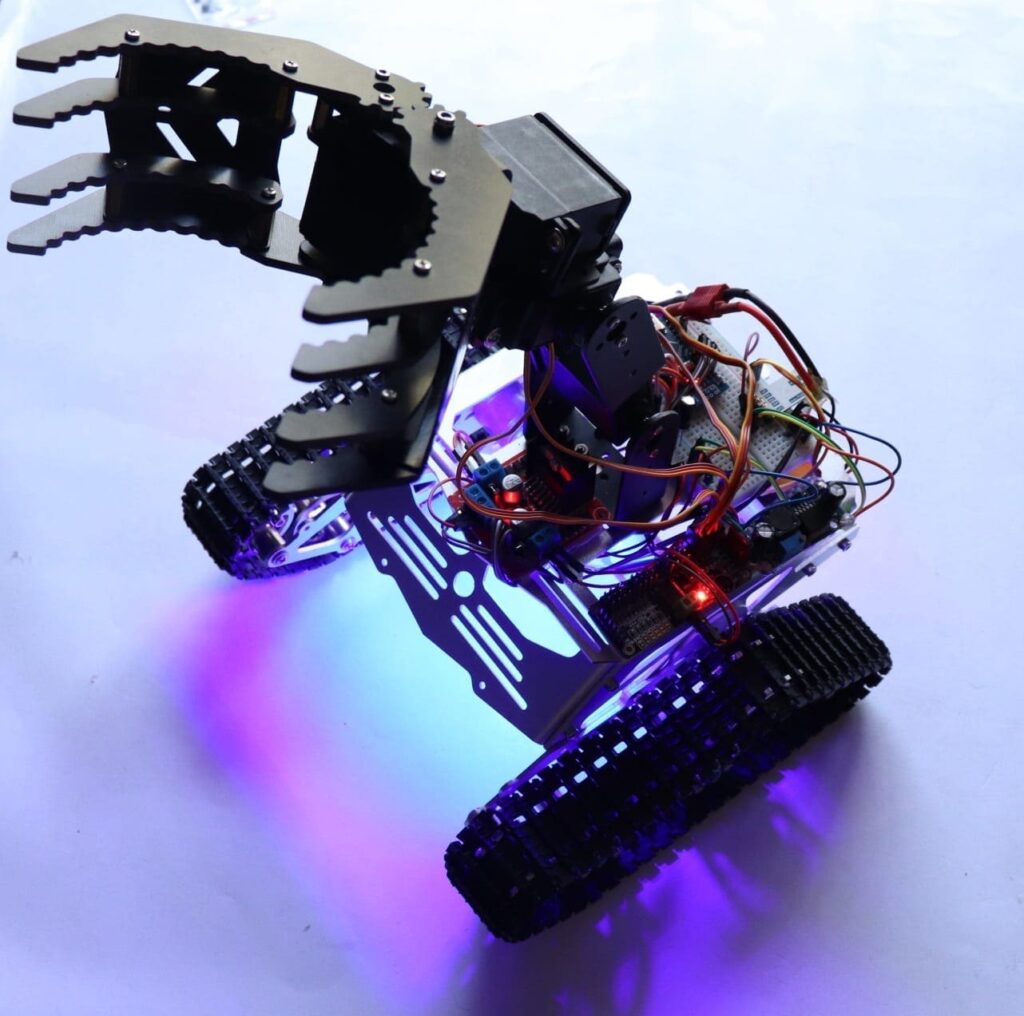
mam nadzieję, że przeszedłeś część wprowadzającą Spinel Crux L2 – Arduino Wybierz i umieść robota z ramieniem robota. Wygląda fajnie pod świecącymi światłami, prawda? Dlaczego nie zbudować dla siebie? Tutaj nauczymy się, jak zbudować robota i połączyć ramię robota na nim i zbudować własny robot pick and place.
dostarczymy Ci projekt, kod, schematy obwodów i linki do zakupu własnego ramienia robota, zestawu robota, podwozia i modułów czujników używanych w tym projekcie.
spróbuj zrobić taki sam, a jeśli utknąłeś w projekcie, zawsze możesz skontaktować się z nami lub zadać pytania w polu komentarza lub w naszej grupie WhatsApp. Więc bez dalszych ceregieli, zacznijmy od projektu!
Arduino Wybierz i umieść robota samouczek wideo
najpierw obejrzyj film z robota Pick and Place, który zrobiliśmy.
najpierw pozwólcie, że opowiem wam trochę o komponentach, których użyłem do zbudowania tego robota pick and place.
Arduino Wybierz i umieść potrzebne komponenty robota
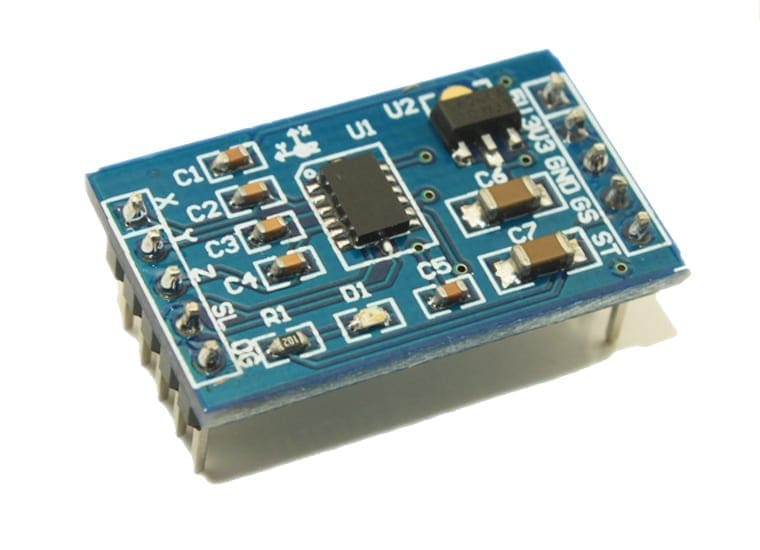
akcelerometr to czujnik, który może być używany do wyczuwania przyspieszenia spowodowanego grawitacją na różnych osiach działających na obiekt. Dzięki temu możemy łatwo obliczyć nachylenie obiektu względem podłoża. Będziemy jeździć naszym spinelem Crux przy użyciu analogowych wartości nachylenia X i Y.
tutaj używam akcelerometru mma7361 do sterowania kierunkiem naszego robota sterowanego gestem; możesz użyć dowolnego akcelerometru, który poda analogowe wartości w kierunku X i Y. Powodem, dla którego używam tego akcelerometru, jest to, że możemy dostarczyć 5 woltów, a także 3,3 woltów jako Vcc do tego akcelerometru. ponieważ używam Arduino MKR1000, mogę podłączyć 3,3 V bezpośrednio z Arduino. Jest również mały, bardzo lekki i można go łatwo podłączyć do Arduino i Raspberry Pi bez większych komplikacji. jeśli chcesz, możesz kupić ten akcelerometr za niską cenę od banggood.com.
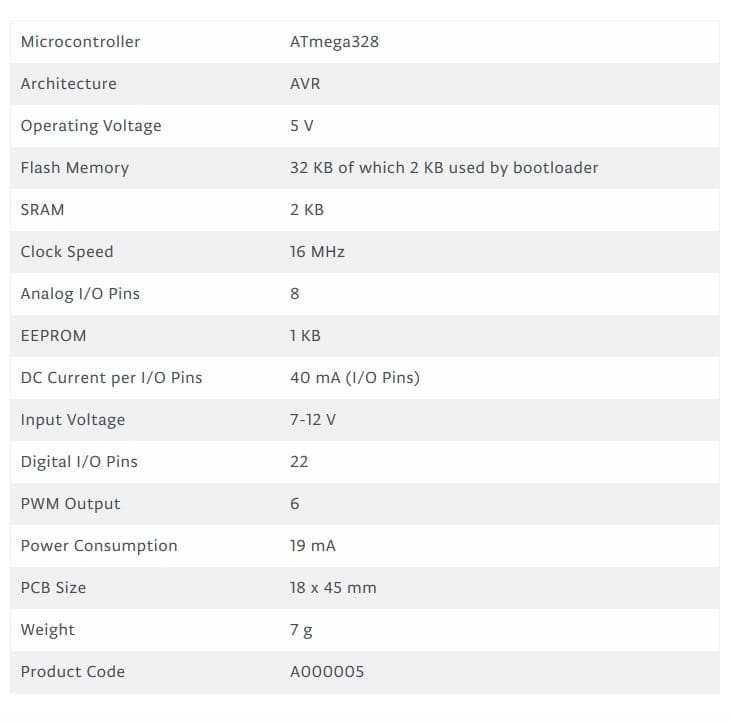
Arduino Nano
w tym projekcie będziemy musieli użyć dwóch mikrokontrolerów – jednego dla kontrolera, który zbierze wszystkie dane czujników i przekaże je do modułu bezprzewodowego, a drugiego na robocie, który zbierze dane z modułu odbiornika, przetworzy je i steruje ramieniem robota oraz robotem pick and place. Arduino Nano jest bardzo mały i można go łatwo zamontować na desce do chleba. Można to łatwo zaprogramować za pomocą komputera PC przez USB za pomocą Arduino IDE
ta płyta może być zasilana za pomocą portu Mini USB. Poprzez pin 30, możemy dostarczyć nieuregulowane źródło napięcia od 6 do 20V lub przez pin 27, możemy zapewnić regulowane źródło zasilania 5V. wybór mocy zostanie automatycznie wykonany przez płytkę Nano.
Ucz się Arduino w łatwy sposób
czy jesteś nowy w Arduino? Chcesz poprawić swoje umiejętności w programowaniu Arduino? Jesteś we właściwym miejscu. Mamy kompletny samouczek dla początkujących Dla Arduino, który obejmuje wszystko od podstaw. W tym bezpłatnym samouczku Arduino dla początkujących, przyjrzymy się wprowadzeniu do platformy Arduino, rozpoczęciu pracy z Arduino IDE, różnymi typami płyt Arduino i wieloma projektami DIY używającymi Arduino. Zobacz!
zacznijmy naukę Arduino
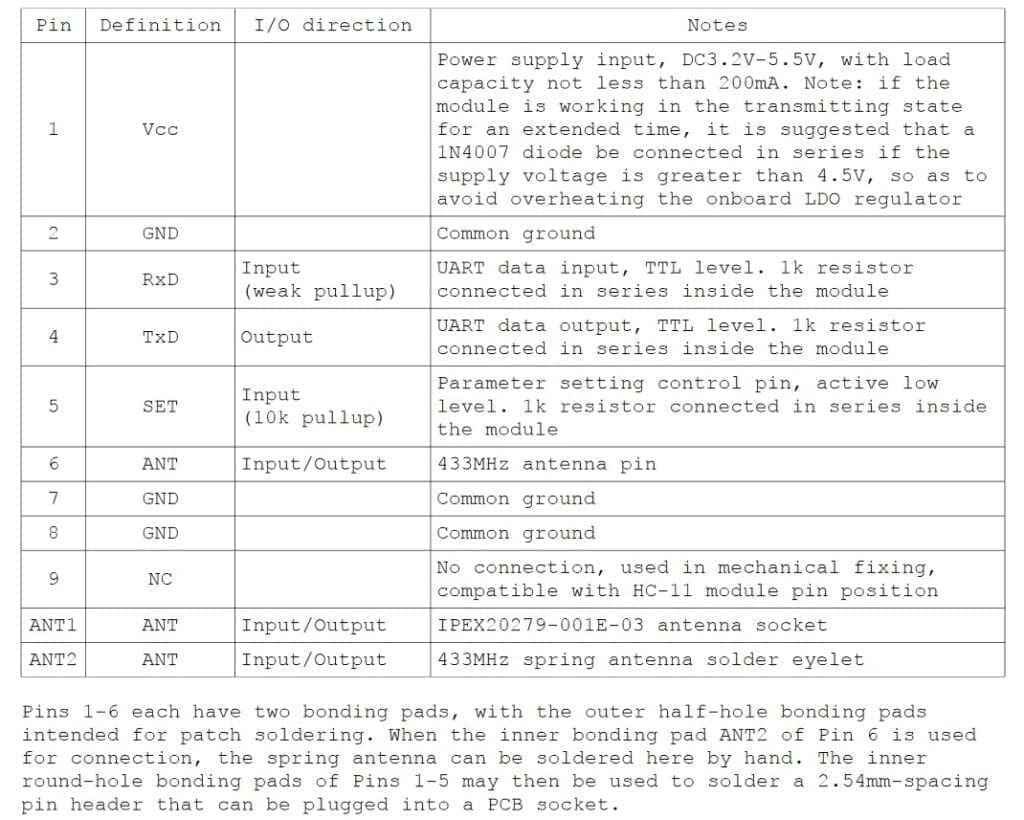
HC12
HC 12 to naprawdę tani moduł bezprzewodowy dalekiego zasięgu, który może być używany do bezprzewodowej komunikacji szeregowej na duże odległości do 1,7 KM. Moduł jest naprawdę kompaktowy lekki i przyjazny dla Płyty Chlebowej, co czyni go najlepszym kontrolerem bezprzewodowym dla naszego projektu.

Pinout
testowanie połączenia HC12
#include <SoftwareSerial.h>SoftwareSerial HC12(10, 11); // HC-12 TX Pin, HC-12 RX Pinvoid setup() {Serial.begin(9600); // Serial port to computerHC12.begin(9600); // Serial port to HC12}void loop() {while (HC12.available()) { // If HC-12 has dataSerial.write(HC12.read()); // Send the data to Serial monitor}while (Serial.available()) { // If Serial monitor has dataHC12.write(Serial.read()); // Send that data to HC-12}}
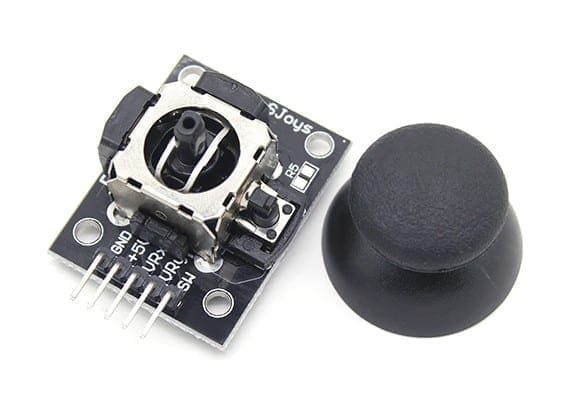
Joystick
jest to najczęściej używany kontroler robota, który jest dostarczany z różnymi zestawami robotów DIY robot/Robot arm kit, który jest zbudowany do pracy z arduino. Konstrukcja jest dość prosta i bardzo łatwa w użyciu. Wykorzystuje dwa potencjometry do obliczania ruchu w osi x i osi y oraz przełącznik do wyczuwania naciśnięcia przycisku.
można to łatwo podłączyć do pinów analogowych arduino i bezpośrednio odczytywać wartości analogowe.
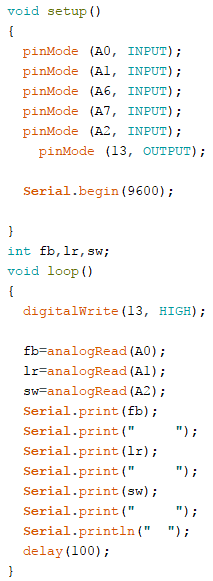
Pobierz
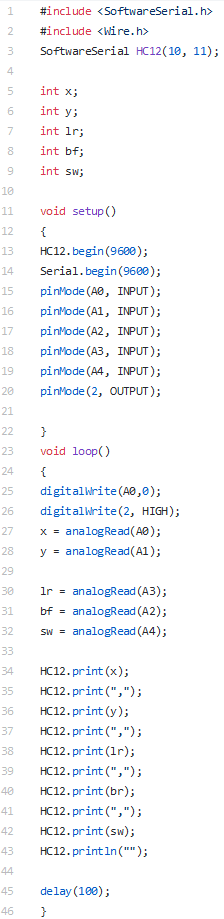
przed załadowaniem głównego kodu upewnij się, że joystick działa, używając tego kodu. Pobierz kod z powyższego linku. W tym przykładzie, co robimy jest po prostu zbieranie danych wyjścia analogowe z joysticka za pomocą pinów analogowych (A0,A1, A2) arduino. Wartości te są zapisywane w zmiennych, a następnie drukowane na monitorze szeregowym.
podzielimy ten post na dwie części
1 – Pick and Place Robot Pilot Zdalnego Sterowania
Nadajnik składa się z płyty do krojenia chleba, w której montujemy wszystkie czujniki i komponenty, aby uzyskać dane, które są używane do napędzania robota pick and place I ramienia robota. Obejmuje to akcelerometr, joystick i moduł HC12.
użyjemy akcelerometru do sterowania ramieniem robota i joysticka do sterowania robotem. Na razie użyjemy przycisku joysticka, aby zamknąć rękę robota. Dane z tych czujników są przesyłane bezprzewodowo do robota DIY za pomocą modułu HC12.
2-Robot typu Pick and Place
tutaj powiem wam, jak zrobić ramię robota, zbudować robota i Zamontować Ramię na robocie. Dowiesz się również, jak zaprogramować Arduino do odczytu danych pochodzących z modułu komunikacji bezprzewodowej – HC12, przetwarzać je oraz jak zdalnie sterować ramieniem robota za pomocą Arduino wraz z robotem.
Nauka robotyki DIY jeszcze nigdy nie była tak prosta!
Robotyka DIY to zabawna i łatwa rzecz, której możesz się nauczyć w ciągu kilku minut, jeśli masz odpowiedni przewodnik. Chcesz nauczyć się Robotyki, ale nie wiesz od czego zacząć? To dla Ciebie. Tutaj pomożemy Ci rozpocząć robotykę DIY dzięki łatwym do naśladowania, w 100% darmowym instrukcjom krok po kroku, zaczynając od podstaw Robotyki, części robota, a następnie zaczniemy kompletne samouczki krok po kroku. Tutaj znajdziesz również niesamowitą kolekcję samouczków projektu Robotyki od poziomu początkującego do zaawansowanego, aby rozpocząć pracę z robotyką DIY.
zacznij uczyć się Robotyki
Część 1-Pilot Zdalnego Sterowania
jak wspomniano wcześniej, ten Robot DIY jest robotem zdalnie sterowanym. Tak więc w sekcji kontrolera mamy deskę do krojenia chleba, joystick-do sterowania ruchem robota oraz zamykaniem i otwieraniem pięści robota, akcelerometr – do poruszania ramieniem robota i moduł bezprzewodowy do przesyłania tych danych do robota.
po prostu podłącz wszystkie komponenty, jak pokazano poniżej. Będziemy zasilać Arduino z 5V power bank i używać 5 V Vout arduino do zasilania wszystkich innych modułów.
płytka drukowana pilota
w moim poprzednim filmie pokazałem, jak zrobić ten Bezprzewodowy Pilot Zdalnego Sterowania dla robota RC za pomocą akcelerometru, przycisków i modułu bezprzewodowego HC12. Jeśli jeszcze tego nie widziałeś, najpierw zobacz poniższy film. Ponieważ będziemy używać tego pilota do sterowania tym robotem.
zasadniczo ten pilot zdalnego sterowania odczytuje analogowe i cyfrowe dane z czujników, takich jak przyciski akcelerometru joystick i przechowuje je w oddzielnych zmiennych. Zmienne te zostaną połączone w jeden długi ciąg i ten ciąg zostanie wysłany do naszego robota za pomocą modułu bezprzewodowego HC12.
rysowanie schematów i projektowanie PCB przy użyciu Altium
więc użyłem Altium Designer, aby narysować Obwód i zaprojektować PCB. Jest to potężne narzędzie, które można wykorzystać do projektowania i tworzenia własnych PCB dla projektu, a także złożonych i wieloosobowych PCB do użytku przemysłowego. Oto link do wersji próbnej Altium. Więc upewnij się, że to sprawdzisz.
układ
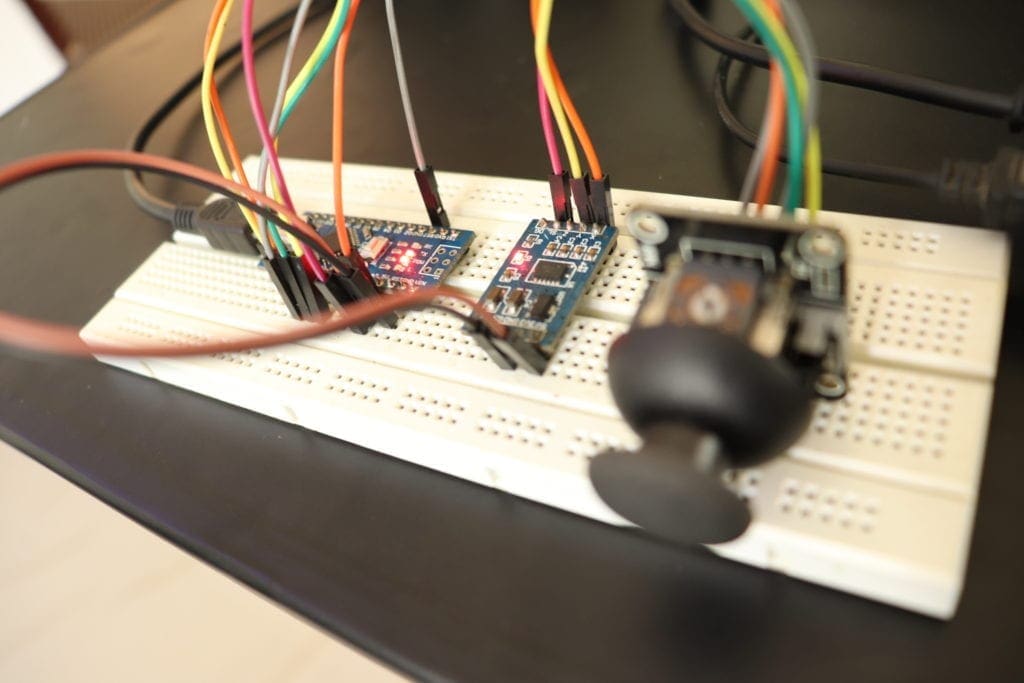
zrobiłem układ, który zawierał wszystkie elementy: joystick, akcelerometr, moduł arduino nano i hc12 podłączony do sworznia GPIO Arduino i zmontowany na płycie Chlebowej.

to działało bez zarzutu, ale problem w tym, że cała płyta wyglądała na bardzo niechlujną ze wszystkimi kablami łączącymi się tu i tam. Zdecydowałem się więc na PCB.
w wersji PCB dodałem 4 przełączniki, których będę używał do następnego projektu.
dodałem również regulator 7805, który pomoże mi zapewnić napięcie wejściowe między 7V a 35V, dzięki czemu mogę bez żadnych problemów korzystać z zasilacza USB 5V, baterii 9V lub nawet Baterii Lipo 12 V. Dodałem również kilka diod LED, które pozwolą mi wiedzieć, czy coś przestało działać. Obwód znajdziesz w linku poniżej.
układ PCB
Altium PCB designer może być również używany do tworzenia układu PCB. To jest układ, który zrobiłem za pomocą obwodu. Jak widać jest to płytka dwuwarstwowa, co oznacza, że routing jest po obu stronach-górnej i dolnej.

po lewej stronie planszy zostawiłem trochę pustego miejsca na baterie teraz mam ze sobą plik Gerber. Wszystko, co musiałem zrobić, to zamówić płytkę drukowaną.
kiedy już zdobyłem wszystkie komponenty, przylutowałem je wszystkie razem i to jest moja ostatnia płytka. Widzisz, wszystkie komponenty są teraz połączone z płytą.
int x;int y;int lr;int bf;int sw;void setup(){ Serial.begin(9600);pinMode(A0, INPUT);pinMode(A1, INPUT);pinMode(A2, INPUT);pinMode(A3, INPUT);pinMode(A4, INPUT);pinMode(2, OUTPUT);}void loop(){digitalWrite(A0,0);digitalWrite(2, HIGH);x = analogRead(A0);y = analogRead(A1);lr = analogRead(A2);bf = analogRead(A3);sw = analogRead(A4);Serial.print("Accelerometer");Serial.print("X = ");Serial.println(x);Serial.print("Y = ");Serial.println(y);Serial.println("");Serial.print("Joy Stick");Serial.println("");Serial.print("Left/Right = ");Serial.println(lr);Serial.print("Back/Forward = ");Serial.println(bf);Serial.print("Switch = ");Serial.println(sw);Serial.println("");Serial.println("");delay(250);}
po przesłaniu tego kodu Uruchom monitor szeregowy i sprawdź, czy wszystkie te wartości są poprawnie wyświetlane.
następnie możesz przesłać prawdziwy kod poniżej.
Kod
po prostu pobierz poniższy kod, korzystając z poniższego linku do pobrania i prześlij go do kontrolera.
Pobierz
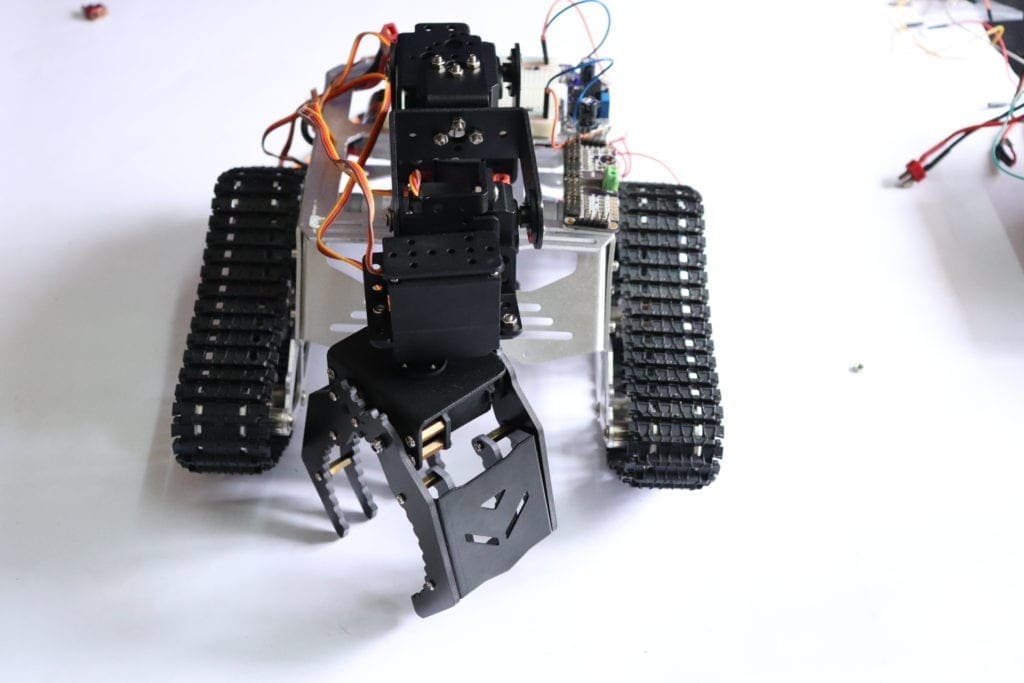
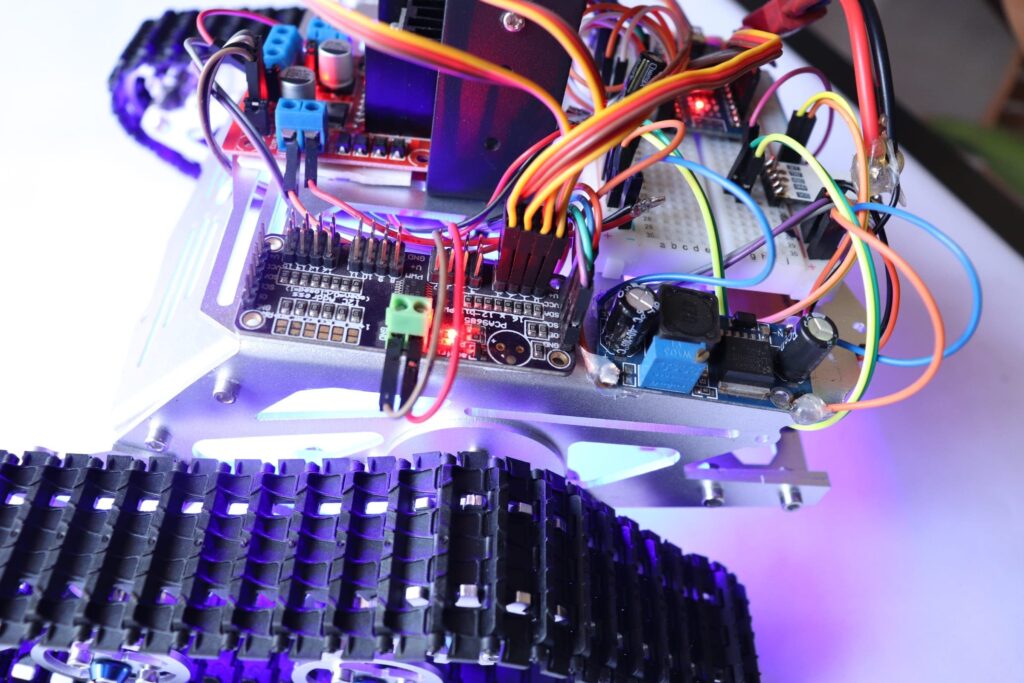
część 2-Robot
główną częścią robota jest podwozie, w którym montujemy wszystkie elementy łącznie z ramieniem.
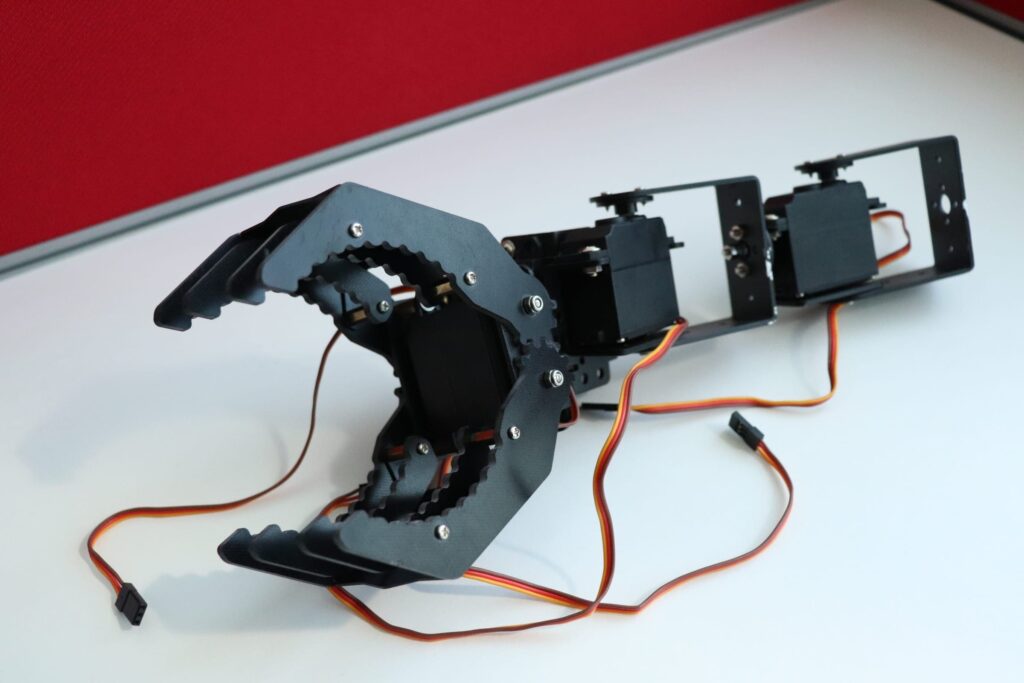
mam Zestaw robotów z banggood.com. To ramię robota wykonane jest z dobrej jakości aluminium i jest naprawdę lekkie. Ten ma tak wiele punktów montażowych, które pozwolą nam połączyć się z dowolnym korpusem robota / podwoziem bez wiercenia otworów montażowych.
Kliknij tutaj, aby to sprawdzić
Istnieją 4 serwosilniki, które dadzą ramię robota w sumie 3 stopnie swobody. Serwosilniki są dołączone, a napięcie robocze wynosi 4,8-6 V.
możesz kupić to razem z serwosilnikiem lub możesz je kupić osobno.
obudowa, której użyłem do wykonania tego robota pick and place, jest czymś, o czym chciałbym porozmawiać. Mam ten zestaw banggood.com. nie tylko ten, mają tak wiele rodzajów RAM robotów, silników i prawie wszystkich czujników do robienia Arduino, raspberry pi i innych projektów elektronicznych i hobbystycznych. Otrzymasz wszystkie te rzeczy za niską cenę z naprawdę szybką i wysokiej jakości wysyłką.
a wspaniałą rzeczą w tym zestawie jest to, że zapewniają wszystkie narzędzia potrzebne do złożenia ramy razem.
Pobierz Zestaw robotów DIY od BangGood
Kliknij tutaj, aby to sprawdzić!!
sterowanie serwomotorem
PCA9685 to 16-kanałowy 12-bitowy sterownik serwomotoru PWM I2C-bus. Kierowca może bardzo łatwo podłączyć się do arduino, Malin Pie i łatwo zaprogramować do sterowania pojedynczymi lub wieloma serwosilnikami i stworzyć własny samolot RC, samochód, statek, quadrapod, hexapod lub cokolwiek chcesz.
kliknij ten link, aby dowiedzieć się więcej o sterowniku silnika serwo.
Pick and Place Robot-Connections
tutaj będziemy używać zasilacza 12 V do zasilania całego robota. Podajemy surowe 12 V do DIODY LED i napięcia IC sterownika silnika w silniku.
następnie używamy regulatora, aby obniżyć napięcie do 5V i podać go do sterownika Arduino, HC12 i serwomotoru.
możesz napędzać silniki PRĄDU STAŁEGO za pomocą dobrego sterownika silnika IC. W tym projekcie będę używał Sterownika Silnika Dual H Bridge IC-L293D, który może sterować dwoma silnikami serwo na raz.
aby uzyskać więcej informacji na temat napędzania silników prądu stałego za pomocą układu L293D IC, Kliknij tutaj. Jeśli jesteś nowy w tym, lepiej jest przejść przez to przed przejściem do następnego kroku, aby lepiej zrozumieć projekt.
po prostu podłącz wszystkie komponenty, jak pokazano poniżej.
będziemy zasilać Arduino za pomocą banku mocy 5V i używać Vout 5 V Arduino do zasilania wszystkich innych modułów.
Arduino – Servo motor Driver
- 5 Vout – VCC Arduino
- Gnd – Gnd
- SDA – SDA
- SCL – SCL
Arduino – HC12
- 5 Vout – VCC Arduino
- Gnd – Gnd
- 10 – TX
- 11 – Rx
Servo motor Driver – Servo Motor
- Servo 1 – Port 000
- Servo 2 – Port 001
- Servo 3 – Port 002
- Servo 4 – Port 003
Arduino – L293D
- Pin 2 – Motor 1 A
- Pin 3 – Motor 1 B
- Pin 4 – Motor 2 A
- Pin 5 – Motor 2 b
L293D
mostek H będzie działał tylko wtedy, gdy Pin Enable jest ustawiony na Logic 1
jedną rzeczą, o której należy pamiętać podczas korzystania z tego układu scalonego, są dwa piny, na których musimy dostarczyć moc wejściową. Pin 8 i Pin 16; oba są do zupełnie innych celów. Pin 9 służy do napędzania silnika, który może obsłużyć napięcie od 6 V do 30 woltów i Pin 16, który zasili układ scalony obwodu wewnętrznego. Pod żadnym pozorem nie należy wymieniać tych dwóch pinów, ponieważ może to spalić chip.
Kod
po prostu pobierz poniższy kod, korzystając z poniższego linku do pobrania i prześlij go do robota DIY, a będziesz gotowy do pracy.

Pobierz
Lets Ride!!!
po przesłaniu kodu do robota wybierz i umieść, możesz podłączyć robota do źródła zasilania 12 V, A kontroler bezprzewodowy robota do źródła zasilania 5 V.
teraz powinieneś być w stanie zdalnie sterować robotem za pomocą kontrolera bezprzewodowego.
to dopiero początek. My, Grupa RootSaid, pracujemy nad bezprzewodową rękawicą sterującą, która może być używana do sterowania całym robotem, w tym ramieniem robota. Ale jest coś fajnego w tej rękawicy.
ta rękawica może wykrywać gesty rąk bez czujnika Flex. Tak, dobrze słyszałeś. Chcesz dowiedzieć się więcej? Bądź częścią RootSaid.
Subskrybuj stronę RootSaid, wpisując poniżej swój identyfikator e-mail. Otrzymasz powiadomienie, gdy tutorial będzie dostępny dla Ciebie do majsterkowania.