Per realizzare alta efficienza, grande gestibilità e risparmio energetico nelle applicazioni industriali relative ai motori a induzione, è necessario adottare sistemi di convertitore di frequenza controllabili. Il sistema del convertitore di frequenza al giorno d’oggi è motore a corrente alternata alimentato da un convertitore di frequenza statico. Il convertitore di frequenza aggiornato funziona alla grande per applicazioni con motori a corrente alternata e facilità di installazione. Un problema importante, tuttavia, è causato dalla tensione di uscita non sinusoidale. Questo fattore ha causato molti problemi indesiderati. L’aumento delle perdite del motore a induzione, del rumore e delle vibrazioni, dell’impatto negativo sul sistema di isolamento a induzione e del guasto dei cuscinetti sono esempi di problemi relativi ai sistemi di conversione di frequenza. Maggiori perdite di induzione significano un de-rating della potenza di uscita di induzione per evitare il surriscaldamento. La misurazione in laboratorio mostra che gli aumenti di temperatura possono essere superiori del 40% con il convertitore di frequenza rispetto agli alimentatori generali. La continua ricerca e il miglioramento dei convertitori di frequenza hanno risolto molti di questi problemi. Sfortunatamente, sembra che risolvere un problema abbia accentuato un altro. Ridurre le perdite di induzione e convertitore di frequenza tende ad aumentare l’impatto negativo sull’isolamento. I produttori di induzione sono, ovviamente, consapevoli di questo. Nuovi modelli a induzione (motori resistenti agli inverter) stanno cominciando ad apparire sul mercato. Un migliore isolamento degli avvolgimenti dello statore e altri miglioramenti strutturali garantiscono motori asincroni che si adattano meglio alle applicazioni dei convertitori di frequenza.
Introduzione
Uno dei problemi più gravi per il motore a induzione è stata la difficoltà di adattarlo alla regolazione della velocità. La velocità sincrona di un motore a corrente alternata è determinata dalla seguente equazione.
ns = 120 * f / p
ns = velocità sincrona
f = frequenza di rete elettrica
p = numero di poli
L’unico modo per regolare la velocità, per un dato numero di poli è quello di cambiare la frequenza.
Il principio di base
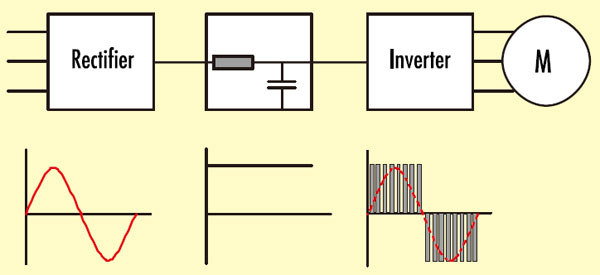
In teoria, l’idea di base è semplice, il processo di trasformazione della frequenza di linea elettrica stabile in una frequenza variabile è fondamentalmente fatto in due fasi:
- La fonte di alimentazione CA viene rettificata in una tensione continua.
- La tensione CONTINUA viene tagliata in una tensione CA della frequenza desiderata.
Un convertitore di frequenza consiste fondamentalmente di tre blocchi: il raddrizzatore, il DC-link e l’inverter.
Diversi tipi di convertitori di frequenza
PWM Fonte di tensione Inverter (VSI)
Il PWM (Pulse Width Modulation) è ampiamente applicato nel convertitore di frequenza industria. Sono disponibili da diverse centinaia di watt fino a megawatt.
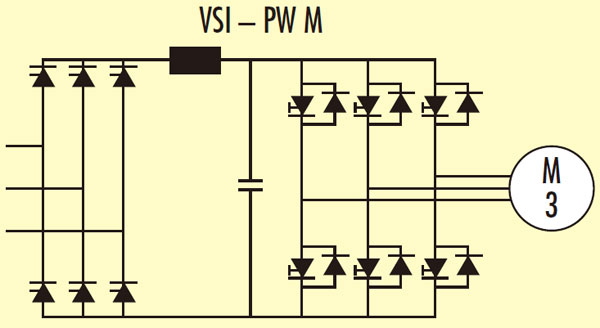
Un convertitore PWM non deve corrispondere esattamente il carico, ha bisogno solo assicurarsi che il carico non consuma corrente superiore al convertitore PWM è valutato per. È abbastanza possibile eseguire un’induzione da 20 kW con un convertitore PWM da 100 kW. Questo è un grande vantaggio che rende il funzionamento più facile per l’applicazione.
Al giorno d’oggi, il convertitore di frequenza PWM utilizza il traduttore bipolare a gate isolato (IGBT). I moderni convertitori di frequenza PWM funzionano molto bene e non sono molto indietro rispetto ai progetti che utilizzano un alimentatore sinusoidale, almeno non nell’intervallo di potenza fino a 100 kW o giù di lì.
Current Source Inverter (CSI)
The current source inverter è un design ruvido e piuttosto semplice rispetto al PWM. Utilizza semplici tiristori o SCR nei circuiti di potenza, il che lo rende molto più economico. Ha anche il vantaggio di essere molto affidabile. Il design lo rende a prova di cortocircuito a causa dei grandi induttori nel collegamento DC. È più ingombrante del PWM.
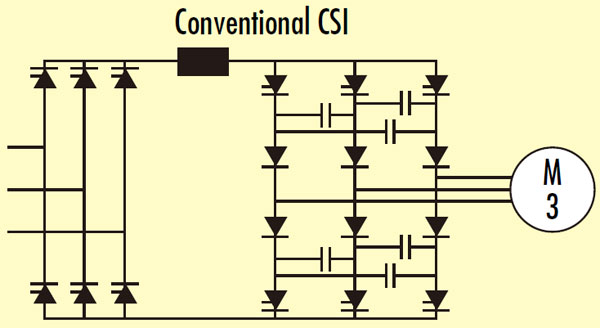
In precedenza, l’inverter sorgente di corrente era la scelta migliore per grandi carichi. Uno svantaggio con l’inverter sorgente di corrente è la necessità di corrispondenza al carico. Il convertitore di frequenza deve essere progettato per il motore asincrono utilizzato. In effetti, l’induzione stessa è una parte del circuito invertito.
L’inverter sorgente di corrente alimenta il motore asincrono con una corrente di forma quadrata. A basse velocità, l’induzione produce una coppia cogging. Questo tipo di convertitore di frequenza genererà più rumore sulla fonte di alimentazione rispetto al convertitore PWM. Il filtraggio è necessario.
Transitori di tensione pesante nella tensione di uscita sono un ulteriore svantaggio dell’inverter sorgente di corrente. I transitori possono raggiungere quasi il doppio della tensione nominale nei casi peggiori. C’è anche il rischio che l’isolamento dell’avvolgimento venga consumato prematuramente, se viene utilizzato questo convertitore di frequenza. Questo effetto è più grave quando il carico non corrisponde correttamente al convertitore di frequenza. Questo può accadere quando si esegue a carico parziale. Questo tipo di convertitore di frequenza sta perdendo sempre di più la sua popolarità.
Flux Vector Control (FVC)
Un flux vector control è un tipo più sofisticato di convertitore di frequenza che viene utilizzato in applicazioni con esigenze di controllo estreme. Nelle cartiere, ad esempio, è necessario controllare la velocità e le forze di allungamento in modo molto preciso.
Un convertitore di frequenza FVC ha sempre una sorta di loop di feedback. Questo genere di convertitore di frequenza è generalmente di interesse secondario nelle applicazioni della pompa. È costoso e i suoi benefici non possono essere sfruttati.
Effetto sul motore
Un’induzione funziona meglio se fornita con una sorgente di tensione sinusoidale pura. Questo è per lo più il caso quando è collegato a una robusta fonte di alimentazione di utilità.
Quando un’induzione è collegata a un convertitore di frequenza, verrà fornita con una tensione non sinusoidale, più simile a una tensione quadrata tritata. Se forniamo un’induzione a 3 fasi con una tensione quadrata simmetrica a 3 fasi, tutte le armoniche che sono multipli di tre, così come i numeri pari, saranno eliminate a causa della simmetria. Ma, ancora a sinistra sono i numeri 5;7 e 11;13 e 17;19 e 23; 25 e così via. Per ogni coppia di armoniche, il numero più basso è rotazione inversa e il numero più alto è rotazione in avanti.
La velocità del motore a induzione è determinata dal numero fondamentale, o numero 1, a causa della sua forte dominanza. Ora cosa succede alle armoniche?
Dal punto di vista delle armoniche, l’induzione sembra avere il rotore bloccato, il che significa che lo slittamento è di circa 1 per le armoniche. Questi non forniscono alcun lavoro utile. Il risultato è principalmente perdite di rotore e riscaldamento extra. Nella nostra applicazione, in particolare, questo è un risultato serio. Con la tecnologia moderna, tuttavia, è possibile eliminare gran parte del contenuto armonico nella corrente di induzione, riducendo così le perdite extra.
Convertitore di frequenza prima
I primi convertitori di frequenza spesso utilizzavano una semplice tensione quadrata per alimentare il motore asincrono. Hanno causato problemi di riscaldamento e le induzioni correvano con un tipico rumore causato dall’ondulazione della coppia. Prestazioni molto migliori sono state ottenute semplicemente eliminando il quinto e il settimo. Ciò è stato fatto attraverso una commutazione extra del segnale di tensione.
Convertitore di frequenza oggi
Al giorno d’oggi, la tecnica è più sofisticata e la maggior parte degli svantaggi sono la storia. Lo sviluppo di semiconduttori di potenza veloci e del microprocessore ha permesso di adattare il modello di commutazione in modo tale da eliminare la maggior parte delle armoniche dannose.
Sono disponibili frequenze di commutazione fino a 20 kHz per convertitori di frequenza nella gamma di media potenza (fino a qualche decina di kW). La corrente di induzione con questo tipo di convertitore di frequenza sarà quasi sinusoidale.
Ad una frequenza di commutazione elevata, le perdite di induzione sono mantenute basse, ma le perdite nel convertitore di frequenza aumenteranno. Le perdite totali diventeranno più alte a frequenze di commutazione eccessivamente elevate.
Qualche motore di teoria di base
La coppia di produzione di un motore a induzione può essere espressa come
T = V * t * B
V = Attivo rotore volume
τ = Corrente al metro statore foro circonferenza
B = densità di Flusso nel traferro
B = proporzionale alla (E / ω) = E / (2 * pi * f)
ω = frequenza angolare della tensione dello statore
E = indotta tensione dello statore
Per ottenere le migliori prestazioni a varie velocità, diventa necessario mantenere un adeguato livello di magnetizzazione per induzione che per ogni velocità.
Una gamma di varie caratteristiche di coppia è mostrato come figura seguente. Per il carico di coppia costante, il rapporto V/F deve essere costante. Per il carico di coppia quadrata, un rapporto V/F costante si tradurrà in una magnetizzazione eccessivamente elevata a velocità inferiore. Ciò genererà perdite di ferro inutilmente elevate e perdite di resistenza (I2R).
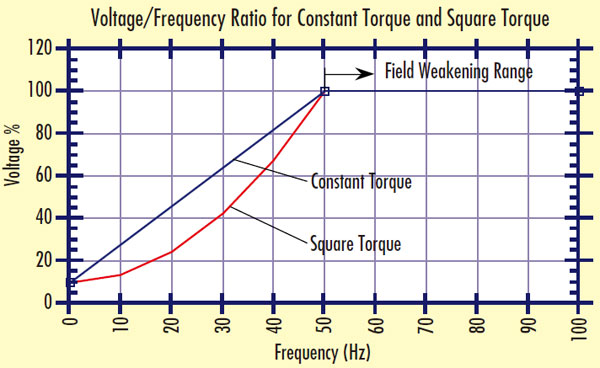
È preferibile utilizzare un rapporto V/F quadrato. Le perdite di ferro e le perdite di I2R sono quindi ridotte ad un livello più accettabile per la coppia di carico effettiva.
Se guardiamo la figura, scopriamo che la tensione ha raggiunto il suo massimo e non può essere aumentata al di sopra della frequenza di base 50Hz. L’intervallo sopra la frequenza di base è chiamato intervallo di indebolimento del campo. Una conseguenza di ciò è che non è più possibile mantenere la coppia necessaria senza aumentare la corrente. Ciò si tradurrà in problemi di riscaldamento-up dello stesso tipo con normale sotto tensioni eseguito da una rete elettrica sinusoidale. La corrente nominale del convertitore di frequenza sarà probabilmente superata.
Funzionamento nell’intervallo di indebolimento del campo
A volte, c’è la tentazione di far funzionare la pompa a frequenze superiori alla frequenza della rete elettrica commerciale per raggiungere un punto di servizio che altrimenti sarebbe impossibile. Fare ciò richiede una maggiore consapevolezza. La potenza dell’albero per una pompa aumenterà con il cubo di velocità. Una velocità eccessiva del 10% richiederà il 33% in più di potenza di uscita. In parole povere, possiamo aspettarci che l’aumento della temperatura aumenterà di circa il 75%.

C’è, tuttavia, un limite a ciò che possiamo spremere dall’induzione a velocità eccessiva. La coppia massima dell’induzione diminuirà in funzione di 1 / F nell’intervallo di indebolimento del campo.
È ovvio che l’induzione cadrà se il convertitore di frequenza non può supportarlo con una tensione che corrisponde a quella necessaria alla coppia.
Declassamento
In molti casi, l’induzione viene eseguita alla massima capacità da una rete elettrica sinusoidale e qualsiasi riscaldamento supplementare non può essere tollerato. Se tale induzione è alimentata da un convertitore di frequenza di qualche tipo, molto probabilmente deve essere eseguita a una potenza di uscita inferiore per evitare il surriscaldamento.
Non è insolito che un convertitore di frequenza per grandi pompe superiori a 300 kW aggiunga ulteriori perdite di induzione del 25-30%. Nella gamma di potenza superiore, solo alcuni dei convertitori di frequenza hanno una frequenza di commutazione elevata: da 500 a 1000 Hz è normale per la precedente generazione di convertitori di frequenza.
Per compensare le perdite extra, è necessario ridurre la potenza di uscita. Si consiglia un declassamento generale del 10-15% per pompe di grandi dimensioni.
Poiché il convertitore di frequenza inquina la rete di alimentazione con armoniche, a volte viene prescritto un filtro di ingresso dalla società elettrica. Questo filtro diminuirà la tensione disponibile in genere del 5-10%. L’induzione funzionerà di conseguenza al 90-95% della tensione nominale. La conseguenza è il riscaldamento aggiuntivo. Declassamento potrebbe essere necessario.
Esempio
Si supponga che la potenza di uscita per il motore della pompa effettivo sia di 300 kW a 50 Hz e che l’aumento di temperatura sia di 80°C utilizzando una rete elettrica sinusoidale. Le perdite extra di 30% si tradurranno in un’induzione che è 30% più calda. Un’ipotesi conservativa è che l’aumento di temperatura varia con il quadrato della potenza dell’albero.
Per non superare gli 80°C, dobbiamo ridurre la potenza dell’albero a
Preduced = √(1/1.3) * 300 = 263kW
La riduzione può essere ottenuta riducendo il diametro della girante o accelerando verso il basso.
Perdite dei convertitori di frequenza
Quando viene determinata l’efficienza totale di un sistema di convertitori di frequenza, devono essere incluse le perdite interne dei convertitori di frequenza. Queste perdite del convertitore di frequenza non sono costanti e non facili da determinare. Sono costituiti da una parte costante e una parte dipendente dal carico.
Perdite costanti:
Perdite di raffreddamento—ventola di raffreddamento) – perdite nei circuiti elettronici e così via.
Perdite dipendenti dal carico:
Perdite di commutazione e perdite di piombo nei semiconduttori di potenza.
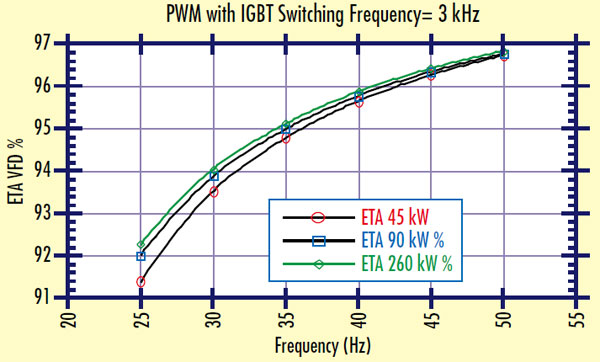
La figura seguente mostra l’efficienza del convertitore di frequenza in funzione della frequenza a carico cubico per unità con potenza nominale di 45, 90 e 260 kW. Le curve sono rappresentative per convertitori di frequenza nella gamma di potenza di 50-300 kW; con la frequenza di commutazione pari a circa 3 kHz e con un IGBT di seconda generazione.
Effetti sull’isolamento del motore
Le tensioni di uscita dei moderni convertitori di frequenza hanno un tempo di salita della tensione molto breve.
dU / dT = 5000V / µs è un valore comune.
Tali pendenze di tensione ripide causeranno uno stress eccessivo nei materiali isolanti dell’avvolgimento ad induzione. Con brevi tempi di salita, la tensione nell’avvolgimento dello statore non è distribuita uniformemente. Con un alimentatore sinusoidale, la tensione di giro-giro in un avvolgimento di induzione è normalmente equamente distribuita. Con un convertitore di frequenza d’altra parte, fino all ‘ 80% della tensione scenderà attraverso il primo e il secondo turno. Poiché l’isolamento tra i fili costituisce un punto debole, questo può rivelarsi pericoloso per l’induzione. Un breve tempo di salita causa anche la riflessione della tensione nel cavo di induzione. Nel peggiore dei casi, questo fenomeno raddoppierà la tensione attraverso i terminali di induzione. Un’induzione alimentata da un convertitore di frequenza da 690 volt potrebbe essere esposta fino a 1 900 volt tra le fasi.
L’ampiezza della tensione dipende dalla lunghezza del cavo di induzione e dal tempo di salita. Con tempi di salita molto brevi, la riflessione completa si verifica in un cavo da 10 a 20 metri di lunghezza.
Per garantire funzionalità e ampia durata del motore, è assolutamente necessario che un avvolgimento sia adattato per l’uso con un convertitore di frequenza. Le induzioni per tensioni superiori a 500 volt devono avere una qualche forma di isolamento rinforzato. L’avvolgimento dello statore deve essere impregnato con una resina che garantisca un isolamento privo di bolle o cavità. Le scariche di bagliore spesso iniziano intorno alle cavità. Questo fenomeno finirà per distruggere l’isolamento.
Ci sono modi per proteggere un motore. Oltre a un sistema di isolamento rinforzato, potrebbe essere necessario inserire un filtro tra il convertitore di frequenza e l’induzione. Tali filtri sono disponibili dalla maggior parte dei noti fornitori di convertitori di frequenza.
Un filtro in genere rallenta il tempo di aumento della tensione da
dU/dT = 5000V/µs a 500-600V/µs
Guasto del cuscinetto
La rottura delle macchine rotanti può spesso essere correlata al guasto del cuscinetto. Oltre al riscaldamento eccessivo, alla lubrificazione insufficiente o all’affaticamento del metallo, la corrente elettrica attraverso i cuscinetti può essere la causa di molti guasti misteriosi dei cuscinetti, specialmente con grandi induzioni. Questo fenomeno è generalmente causato dalla non simmetria nel circuito magnetico, che induce una piccola tensione nella struttura dello statore, o da una corrente di sequenza zero. Se il potenziale tra la struttura dello statore e l’unità dell’albero diventa abbastanza alto, avverrà uno scarico attraverso il cuscinetto. Piccole scariche elettriche tra gli elementi volventi e la pista del cuscinetto alla fine danneggeranno il cuscinetto.
L’uso di convertitori di frequenza aumenterà la probabilità che questo tipo di guasto del cuscinetto si verifichi. La tecnica di commutazione di un moderno convertitore di frequenza provoca una corrente a sequenza zero che, in determinate circostanze, si fa strada attraverso i cuscinetti.
Il modo più semplice per curare questo problema è sollevare un ostacolo per la corrente. Il metodo usuale consiste nell’utilizzare un cuscinetto con un rivestimento isolante sull’anello esterno.
Conclusioni
L’utilizzo di un convertitore di frequenza non significa privo di problemi. Un sacco di domande che devono essere prestate attenzione durante il lavoro di progettazione. Sarà necessario, ad esempio, limitare la potenza dell’albero disponibile per evitare un riscaldamento eccessivo? Potrebbe rivelarsi necessario funzionare a una potenza di uscita inferiore per evitare questo problema.
L’isolamento del motore asincrono resisterà agli effetti dell’inverter? È necessario filtrare? Gli inverter moderni ed efficienti hanno un impatto negativo sull’isolamento a causa dell’elevata frequenza di commutazione e del breve tempo di aumento della tensione.
Quale lunghezza massima del cavo può essere utilizzata senza produrre riflessione a piena tensione? L’ampiezza della tensione dipende sia dalla lunghezza del cavo che dal tempo di salita. Con tempi di salita molto brevi, la riflessione completa si verificherà in cavi lunghi da 10 a 20 metri.
Potrebbe essere necessario utilizzare cuscinetti isolati per evitare che una corrente di sequenza zero trovi la sua strada verso i cuscinetti?
Solo quando ci libereremo di tutte queste domande, saremo in grado di prendere decisioni giuste sull’uso di un convertitore di frequenza.