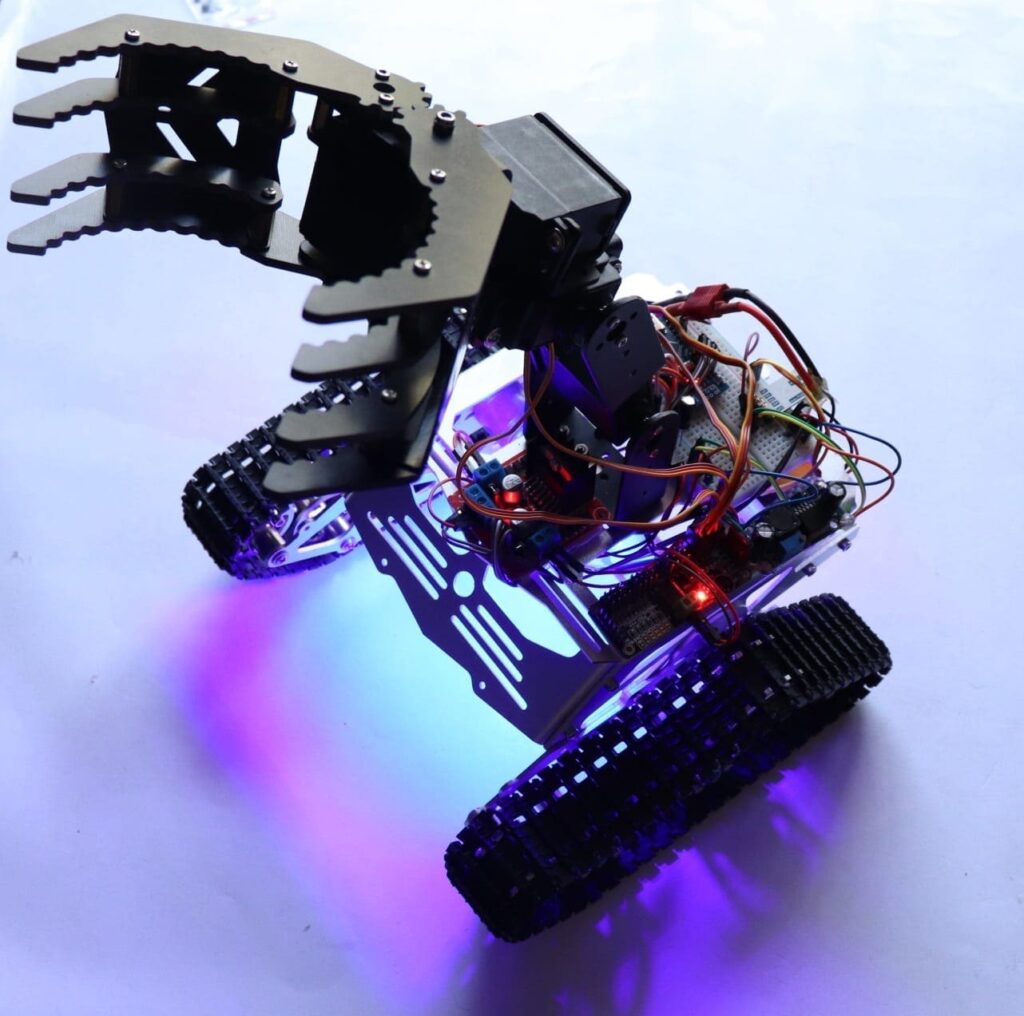
Espero que haya pasado por la parte de introducción del Robot de Selección y colocación Spinel Crux L2 – Arduino con Brazo Robótico. Se ve bien bajo luces brillantes, ¿verdad? ¿Por qué no construyes uno para ti? Aquí aprenderemos a construir un robot y conectar un brazo robótico en la parte superior y construir nuestro propio robot de selección y colocación de bricolaje.
Le proporcionaremos el diseño, el código, los diagramas de circuito y los enlaces para comprar su propio brazo robótico, kit de robot, chasis y módulos de sensores utilizados en este proyecto.
Intente hacer uno usted mismo y si está atascado con el proyecto, siempre puede contactarnos o hacer sus preguntas en el cuadro de comentarios o en nuestro grupo de WhatsApp. Así que sin más preámbulos, ¡comencemos con el proyecto!
Arduino Video Tutorial de Robot Pick and Place
Primera toma en el video del Robot Pick and Place que hemos hecho.
En primer lugar, permítanme contarles un poco sobre los componentes que utilicé para construir este robot de selección y colocación.
Componentes de Robot Arduino Pick and Place Necesarios
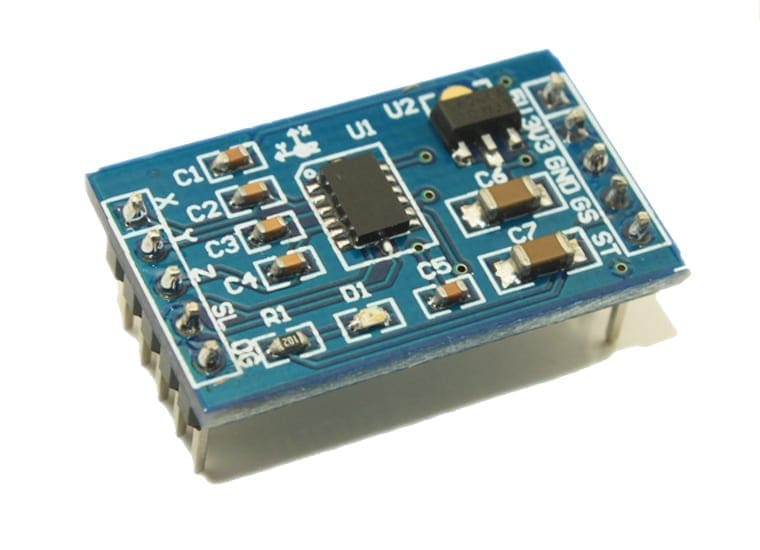
Un acelerómetro es un sensor que se puede utilizar para detectar la aceleración debida a la gravedad en varios ejes que actúan sobre un objeto. Usando esto podemos calcular fácilmente la inclinación de un objeto con respecto al Suelo. Manejaremos nuestro Crux de espinela usando los valores analógicos de inclinación X e Y.
Aquí estoy usando el acelerómetro MMA7361 para controlar la dirección de nuestro Robot Controlado por gestos; puede usar cualquier acelerómetro que proporcione valores analógicos en dirección X e Y. La razón por la que estoy usando este acelerómetro es que podemos proporcionar 5 voltios y 3,3 voltios como Vcc a este acelerómetro. como estoy usando Arduino MKR1000, puedo conectar 3,3 Voltios directamente desde Arduino. También es pequeño, muy ligero y se puede conectar fácilmente a Arduino y Raspberry Pi sin muchas complicaciones. si lo desea, puede comprar este acelerómetro a un precio barato de banggood.com.
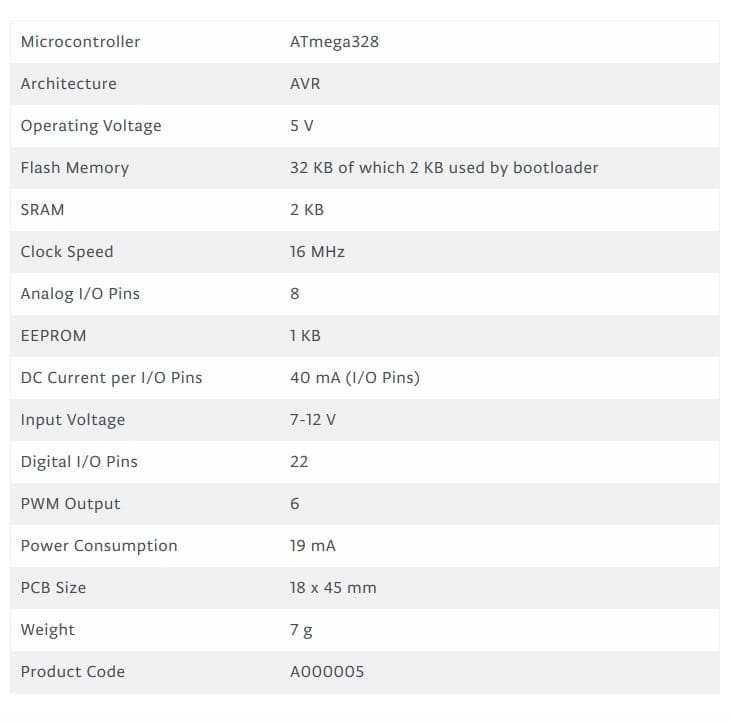
Arduino Nano
En este proyecto tendremos que utilizar dos micorcontroladores: uno para el controlador que recopilará todos los datos del sensor y los transmitirá al módulo inalámbrico y otro en el robot, que recopilará los datos del módulo receptor, los procesará y controlará el brazo robótico y el robot pick and place. El Arduino Nano es muy pequeño y se puede montar fácilmente en la parte superior de la placa de pan. Esto se puede programar fácilmente utilizando un PC a través de USB utilizando Arduino IDE
Esta placa se puede alimentar utilizando el puerto Mini USB. A través del pin 30, podemos suministrar una fuente de voltaje no regulada de 6 a 20 V o a través del pin 27, podemos proporcionar una fuente de alimentación regulada de 5 V. La selección de potencia se realizará automáticamente por la placa Nano.
Aprende Arduino de la manera Fácil
¿Eres nuevo en Arduino? ¿Quieres mejorar tus habilidades en programación Arduino? Estás en el lugar correcto. Tenemos un tutorial completo de nivel principiante para Arduino que cubre todo desde cero. En este Tutorial gratuito de Arduino para principiantes, echaremos un vistazo a Introducción a la plataforma Arduino, primeros pasos con Arduino IDE, diferentes tipos de placas Arduino y muchos proyectos de bricolaje que usan Arduino. ¡Mira esto!
Comencemos a aprender Arduino
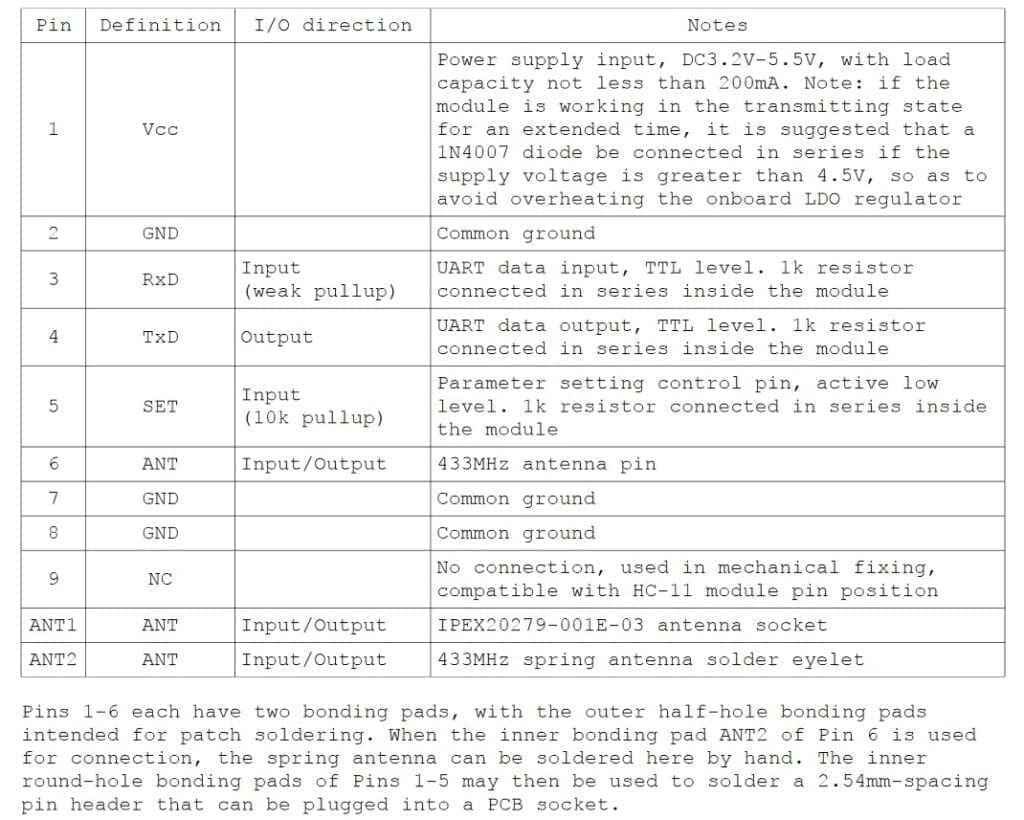
HC12
HC 12 es un módulo inalámbrico de largo alcance realmente barato que se puede utilizar para la comunicación en serie inalámbrica a una larga distancia de hasta 1,7 km. El módulo es realmente compacto, liviano y amigable con la tabla de cortar el pan, lo que lo convierte en el mejor controlador inalámbrico para nuestro proyecto.

Pinout
Comprobación de la Conexión HC12
#include <SoftwareSerial.h>SoftwareSerial HC12(10, 11); // HC-12 TX Pin, HC-12 RX Pinvoid setup() {Serial.begin(9600); // Serial port to computerHC12.begin(9600); // Serial port to HC12}void loop() {while (HC12.available()) { // If HC-12 has dataSerial.write(HC12.read()); // Send the data to Serial monitor}while (Serial.available()) { // If Serial monitor has dataHC12.write(Serial.read()); // Send that data to HC-12}}
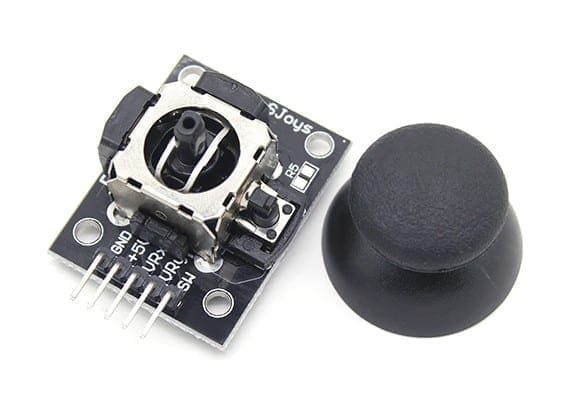
Joystick
Este es el controlador robótico más utilizado que viene con varios kits de robot de bricolaje/kits de brazo de robot construidos para trabajar con arduino. El diseño es bastante simple y es muy fácil de usar. Utiliza dos potenciómetros para calcular el movimiento en el eje x y el eje y y un interruptor para detectar la presión del botón.
Esto se puede conectar fácilmente a los pines analógicos de arduino y leer valores analógicos directamente.
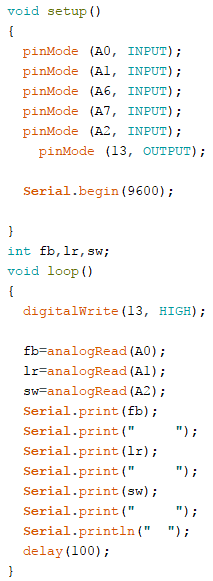
Descargar
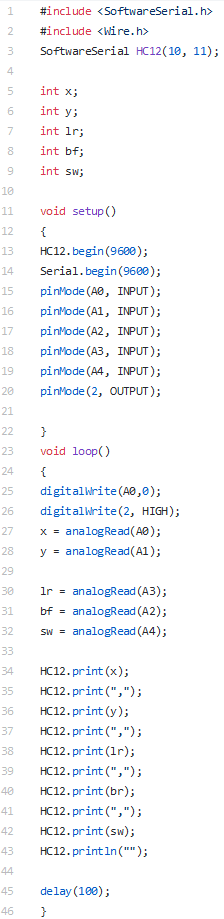
Antes de cargar el código principal, asegúrese de que su joystick funcione utilizando este código. Descargue el código desde el enlace anterior. En este ejemplo, lo que estamos haciendo es simplemente recopilar las salidas analógicas de datos del Joystick utilizando los pines analógicos (A0, A1,A2) de arduino. Estos valores se almacenan en las variables y luego se imprimen en el monitor serie.
Dividiremos este poste en dos partes
1-Robot de control remoto Pick and Place
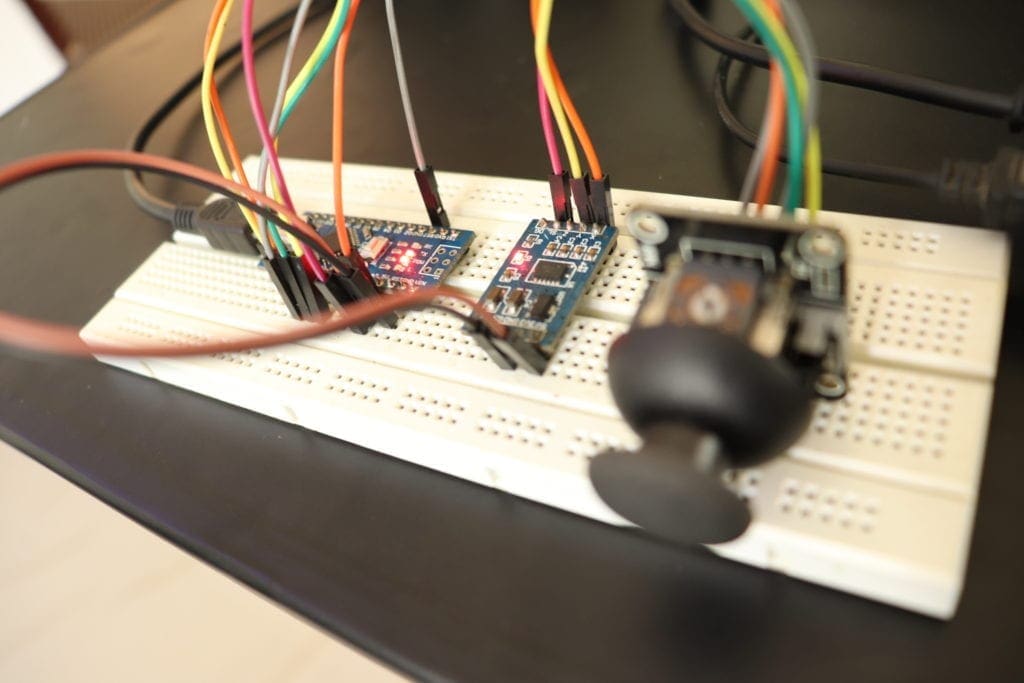
El Transmisor consiste en una tabla de cortar el pan en la que montamos todos los sensores y componentes para obtener los datos que se utilizan para conducir el robot pick and place y el brazo robótico. Esto incluye un acelerómetro, un joystick y un módulo HC12.
Usaremos el acelerómetro para controlar el brazo robótico y el joystick para controlar el robot. Por ahora, usaremos el botón del joystick para cerrar la mano robótica. Los datos de estos sensores se transmiten de forma inalámbrica al robot de bricolaje mediante un módulo HC12.
2-El Robot de Recogida y Colocación
Aquí, les diré cómo hacer un brazo robótico, construir un robot y montar el brazo en la parte superior del robot. También aprenderá a programar Arduino para leer los datos que provienen del módulo de comunicación inalámbrica HC12, procesarlo y cómo controlar a distancia el brazo robótico con Arduino junto con el robot.
¡Aprender Robótica de bricolaje nunca ha sido tan FÁCIL!
La robótica de bricolaje es una cosa divertida y fácil que puedes aprender en cuestión de minutos si tienes una guía adecuada. ¿Quieres aprender Robótica pero no sabes por dónde empezar? Entonces esto es para ti. Aquí, le ayudaremos a comenzar con la robótica de bricolaje con instrucciones paso a paso fáciles de seguir, 100% GRATUITAS, a partir de conceptos básicos de Robótica, partes de Robot, y luego comenzaremos tutoriales paso a paso completos. Aquí también encontrará una impresionante colección de Tutoriales de Proyectos de Robótica, desde nivel principiante hasta avanzado, para que pueda comenzar con la Robótica de bricolaje.
Comience a aprender Robótica
Parte 1 – El Mando a distancia
Como se mencionó anteriormente, este Robot de bricolaje es un robot controlado a distancia. Así, en la sección controlador, tenemos un tablero, un joystick para controlar el movimiento del robot y el cierre y la apertura de el puño de la robot, un acelerómetro para mover el brazo robótico, y un módulo inalámbrico para transmitir los datos al robot.
Conexiones
Simplemente conecte todos los componentes como se muestra a continuación. Alimentaremos el Arduino con un banco de energía de 5 V y usaremos el Vout de 5 V del arduino para alimentar todos los demás módulos.
La PCB del mando a distancia
En mi video anterior, mostré cómo fabrica este Mando a distancia inalámbrico para su Robot RC utilizando un acelerómetro, botones y un módulo inalámbrico HC12. Si aún no lo ha visto, consulte primero el siguiente video. Porque usaremos ese mando a distancia para controlar este robot.
Básicamente, lo que hace este mando a distancia es leer datos analógicos y digitales de sensores como el joystick de los botones del acelerómetro y almacenarlos en variables separadas. Estas variables se combinarán para formar una sola cadena larga y esta cadena se enviará a nuestro robot utilizando el módulo inalámbrico HC12.
Dibujo de esquemas y Diseño de PCB con Altium
, por lo que utilicé Altium Designer para dibujar el circuito y diseñar la PCB. Es una herramienta poderosa que se puede usar para diseñar y crear sus propias PCB para su proyecto, así como PCB complejas y multijugador para uso industrial. Aquí está el enlace a la versión de prueba de Altium. Así que asegúrate de comprobarlo.
Circuito
Hice un circuito que incluía todos los componentes: la palanca de mando, el acelerómetro arduino nano y hc12 módulo conectado al pin GPIO de la arduino y montado en una protoboard.

Funcionó a la perfección, pero el problema era que toda la tabla se veía realmente desordenada con todos los cables de puente que iban de aquí para allá. Así que decidí ir con PCB.
En la versión de PCB, agregué 4 interruptores que usaré para el siguiente proyecto.
También agregué un regulador 7805 que me ayudará a proporcionar un voltaje de entrada entre 7V y 35V para que pueda usar una fuente de alimentación USB de 5V, una batería de 9V o incluso una batería Lipo de 12 V sin ningún problema. También agregué algunos indicadores LED que me harán saber si algo dejó de funcionar. Encontrará el circuito en el siguiente enlace.
Diseño de PCB
Altium PCB designer también se puede usar para hacer diseño de PCB. Este es el diseño que hice usando el circuito. Como puede ver, se trata de una PCB de doble capa, lo que significa que el enrutamiento está allí en ambos lados, tanto en la parte superior como en la inferior.

En el lado izquierdo de la placa dejé un poco de espacio vacío para guardar mis baterías Ahora tengo el archivo Gerber conmigo. Todo lo que tenía que hacer era pedir el PCB.
Una vez que obtuve todos los componentes, los soldé todos juntos y esta es mi PCB final. Verá, todos los componentes están conectados a la placa ahora.
int x;int y;int lr;int bf;int sw;void setup(){ Serial.begin(9600);pinMode(A0, INPUT);pinMode(A1, INPUT);pinMode(A2, INPUT);pinMode(A3, INPUT);pinMode(A4, INPUT);pinMode(2, OUTPUT);}void loop(){digitalWrite(A0,0);digitalWrite(2, HIGH);x = analogRead(A0);y = analogRead(A1);lr = analogRead(A2);bf = analogRead(A3);sw = analogRead(A4);Serial.print("Accelerometer");Serial.print("X = ");Serial.println(x);Serial.print("Y = ");Serial.println(y);Serial.println("");Serial.print("Joy Stick");Serial.println("");Serial.print("Left/Right = ");Serial.println(lr);Serial.print("Back/Forward = ");Serial.println(bf);Serial.print("Switch = ");Serial.println(sw);Serial.println("");Serial.println("");delay(250);}
Una vez cargado este código, inicie el monitor serie y compruebe si todos esos valores se muestran correctamente.
Luego puede cargar el código real a continuación.
Código
Simplemente descargue el siguiente código utilizando el enlace de descarga a continuación y cárguelo a su controlador.
Descargar
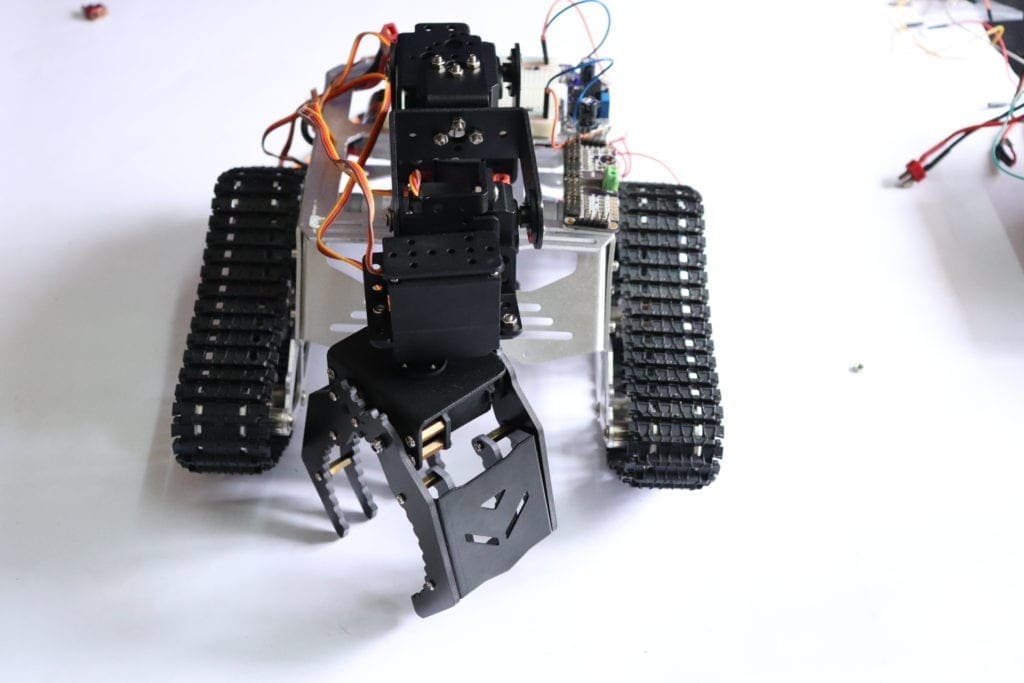
Parte 2 – El Robot
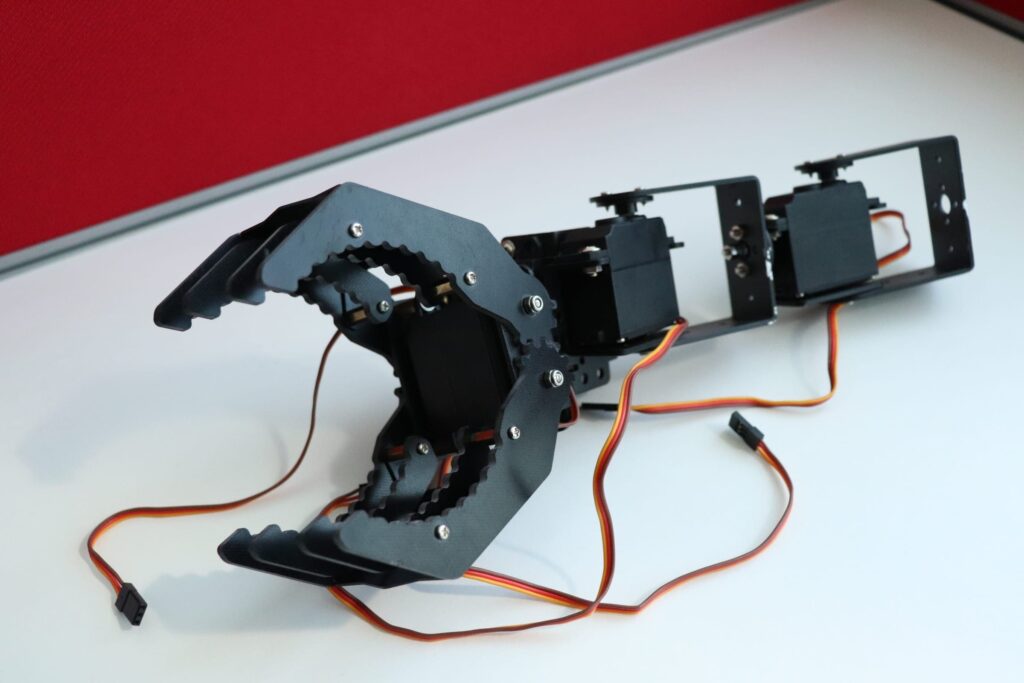
La parte principal del robot es el chasis en el que montamos todos los componentes, incluido el brazo.
Conseguí el kit de brazo robótico de banggood.com. Este brazo robótico está hecho de aluminio de buena calidad y es realmente liviano. Este tiene tantos puntos de montaje que nos permitirán conectarnos a cualquier cuerpo/chasis de robot sin taladrar orificios de montaje.
Haga clic aquí para comprobarlo
Hay 4 servomotores que le darán al brazo robótico un total de 3 Grados de libertad. Los servomotores están incluidos y el voltaje de trabajo es de 4.8-6V.
Puede comprar esto junto con el servomotor o puede comprarlos por separado.
El chasis que utilicé para hacer este robot pick and place es algo de lo que me gustaría hablar. Tengo este kit banggood.com. No solo este, tienen muchos tipos de marcos de robots, motores y casi todos los sensores para hacer Arduino, raspberry pi y otros proyectos electrónicos y de pasatiempos. Obtendrá todas estas cosas a un precio barato con un envío realmente rápido y de calidad.
Y lo mejor de este kit es que proporciona todas las herramientas que necesita para ensamblar el marco.
Obtenga su Kit de Robot de bricolaje De BangGood
Haga clic Aquí para Verlo!!
Control de servomotor
El PCA9685 es un controlador de servomotor controlado por bus PWM I2C de 16 canales y 12 bits. El conductor puede conectarse muy fácilmente a su arduino, Raspberry Pie y programarse fácilmente para controlar servomotores individuales o múltiples y hacer su propio avión RC, automóvil, barco, cuadrapod, hexapod o cualquier cosa que desee.
Siga este enlace para obtener más información sobre el controlador del servomotor.
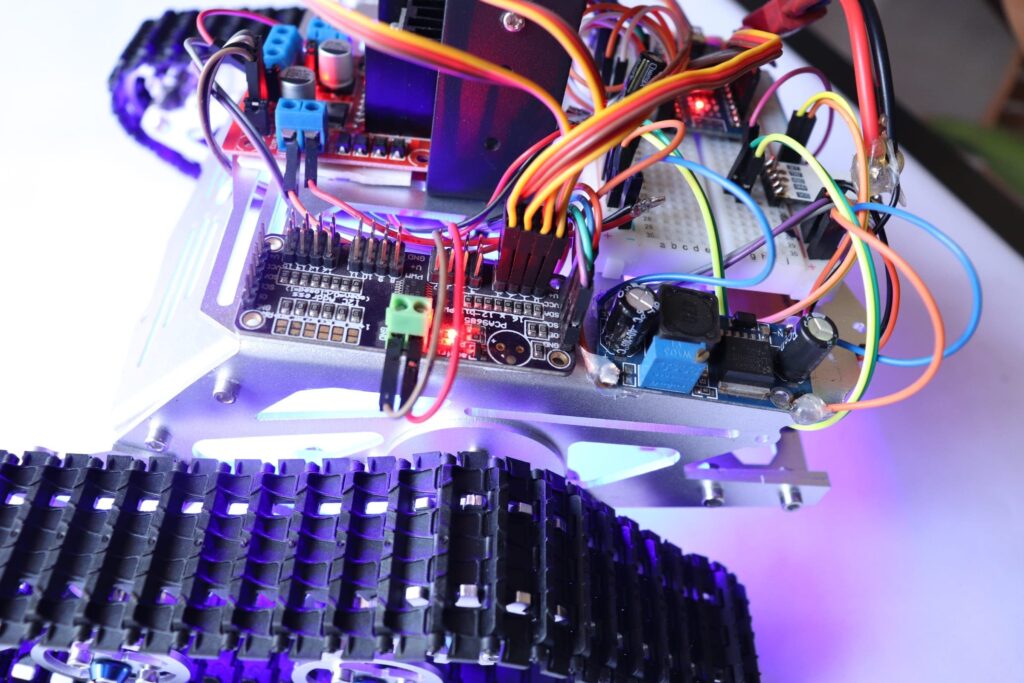
Toma y coloca conexiones de robot
Aquí utilizaremos una fuente de alimentación de 12 V para alimentar todo el robot. Alimentamos los 12 voltios en bruto al LED y el voltaje IC del controlador del motor para el motor.
Luego usamos un regulador para reducir el voltaje a 5V y alimentarlo a Arduino, HC12 y servomotor.
Puede conducir los motores de CC utilizando un buen controlador de motor IC. En este proyecto, usaré el Controlador de motor de puente Doble H IC-L293D que puede controlar dos servomotores a la vez.
Para obtener más detalles sobre la conducción de motores de CC con IC L293D, haga clic aquí. Si es nuevo en esto, es mejor pasar por esto antes de pasar al siguiente paso para obtener una mejor comprensión del proyecto.
Simplemente conecte todos los componentes como se muestra a continuación.
Alimentaremos el Arduino con un banco de energía de 5 V y usaremos el Vout de 5 V del arduino para alimentar todos los demás módulos.
Arduino – Servo motor Driver
- 5 Vout – VCC Arduino
- Gnd – Gnd
- SDA – SDA
- SCL – SCL
Arduino – HC12
- 5 Vout – VCC Arduino
- Gnd – Gnd
- 10 – TX
- 11 – Rx
Servo motor Driver – Servo Motor
- Servo 1 – Port 000
- Servo 2 – Port 001
- Servo 3 – Port 002
- Servo 4 – Port 003
Arduino – L293D
- Pin 2 – Motor 1 A
- Pin 3 – Motor 1 B
- Pin 4-Motor 2 A
- Pin 5 – Motor 2 B
L293D
El puente H funcionará solo si el Pin de habilitación está configurado en Lógica 1
Una cosa a tener en cuenta al usar este IC es que hay dos pines donde tenemos que suministrar la energía de entrada. Pin 8 y Pin 16; ambos son para propósitos completamente diferentes. El pin 9 es para conducir el motor que puede manejar un voltaje de 6 V a 30 Voltios y el Pin 16 que encenderá el IC para el circuito interno. Bajo ninguna circunstancia, no debe intercambiar estos dos pines o puede quemar el chip.
Código
Simplemente descargue el siguiente código utilizando el enlace de descarga a continuación y cárguelo a usted robot de bricolaje y estará listo para comenzar.

Descargar
¡Lets Ride!!!
Una vez que el código se cargue en su robot de selección y colocación, puede conectar su robot a una fuente de alimentación de 12 V y su controlador inalámbrico de robot a una fuente de alimentación de 5 V.
Ahora debería poder controlar el robot de forma remota utilizando el controlador inalámbrico.
Esto es solo el comienzo. Nosotros, el grupo RootSaid, estamos trabajando en un guante de control inalámbrico que se puede usar para controlar todo el robot, incluido el brazo robótico. Pero hay algo genial en este guante.
Este guante puede detectar gestos con las manos SIN sensor de flexión. Sí, lo has oído bien. ¿Quieres saber más? Sé parte de RootSaid.
Suscríbase al sitio web de RootSaid simplemente ingresando su ID de correo electrónico a continuación. Recibirás una notificación cada vez que el tutorial esté disponible para que lo utilices.