håber du har gennemgået introduktionsdelen af Spinelkernen L2-Arduino Pick and Place Robot med robotarm. Ser cool ud under glødende lys rigtigt? Hvorfor ikke bygge en til dig selv? Her lærer vi, hvordan man bygger en robot og forbinder en robotarm oven på den og bygger vores egen DIY pick and place robot.
vi giver Dig design, kode, kredsløbsdiagrammer og links til at købe din egen robotarm, robotkit, chassis og sensormoduler, der bruges i dette projekt.
prøv at lave en selv, og hvis du sidder fast med projektet, kan du altid kontakte os eller stille dine spørgsmål i kommentarfeltet eller i Vores Hvadapp-gruppe. Så uden videre, lad komme i gang med projektet!
Arduino Pick and Place Robot Video Tutorial
Tag først videoen af den Pick and Place Robot, vi har lavet.
lad mig først fortælle dig lidt om de komponenter, jeg brugte til at bygge denne pick and place robot.
Arduino Vælg og placer Robotkomponenter nødvendige
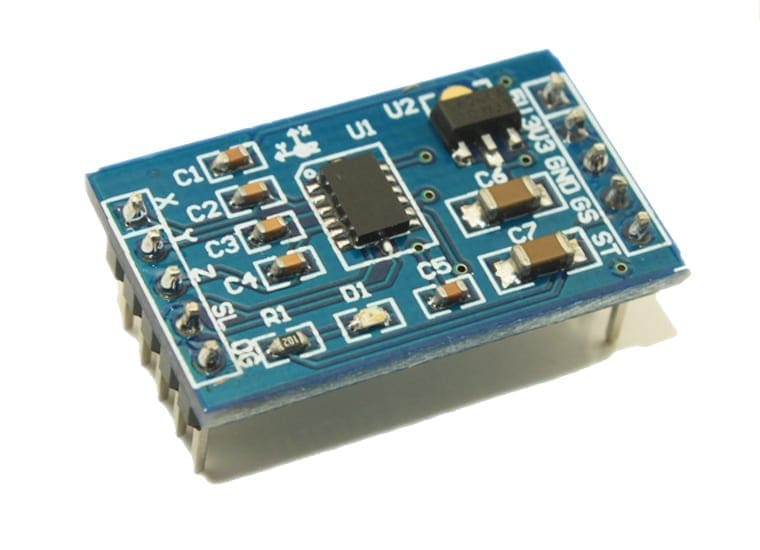
et accelerometer er en sensor, der kan bruges til at mærke accelerationen på grund af tyngdekraften på forskellige akser, der virker på et objekt. Ved hjælp af dette kan vi nemt beregne hældningen af et objekt i forhold til jorden. Vi kører vores Spinel-kerne ved hjælp af de analoge værdier.
her bruger jeg mma7361 accelerometer til at styre retningen af vores Gestusstyrede Robot; du kan bruge ethvert accelerometer, der giver analoge værdier i H og Y retning. Grunden til at jeg bruger dette accelerometer er, at vi kan levere 5 volt såvel som 3,3 volt som Vcc til dette accelerometer. da jeg bruger Arduino MKR1000, kan jeg forbinde 3,3 Volt direkte fra Arduino. Det er også lille meget let og kan nemt tilsluttes Arduino og Raspberry Pi uden meget komplikation. hvis du vil, kan du købe dette accelerometer til en billig pris fra banggood.com.
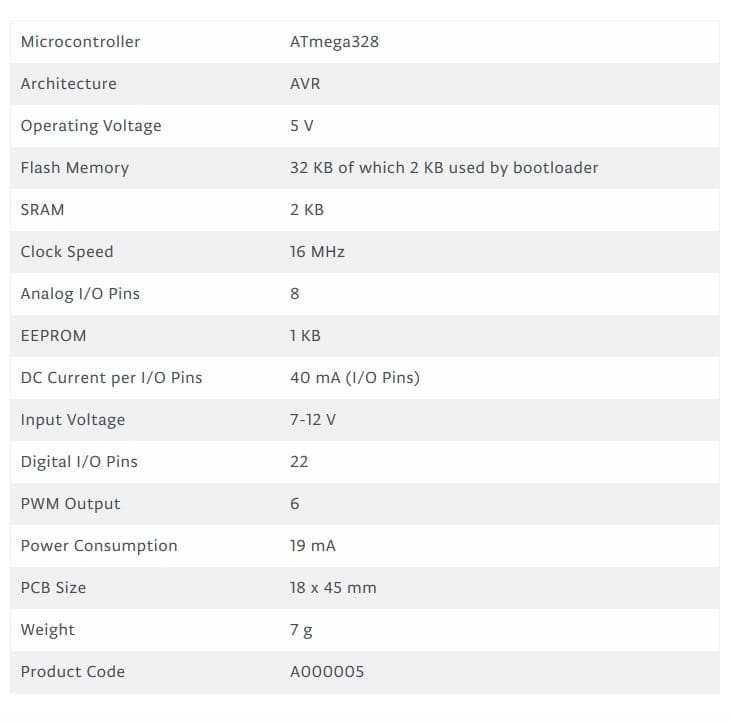
Arduino Nano
i dette projekt bliver vi nødt til at bruge to micorcontroller – en til controlleren, der samler alle sensordata og overfører dem til det trådløse modul og en anden på roboten, som samler data fra modtagermodulet, behandler dem og styrer robotarmen og pick and place-roboten. Arduino Nano er meget lille og kan nemt monteres oven på brødbrættet. Dette kan let programmeres ved hjælp af en PC via USB ved hjælp af Arduino IDE
dette kort kan drives ved hjælp af Mini USB-porten. Gennem pin 30 kan vi levere en ureguleret spændingskilde på 6 til 20v eller gennem pin 27, vi kan levere en reguleret strømkilde på 5V.
Lær Arduino den nemme måde
er du ny til Arduino? Vil du forbedre dine færdigheder i Arduino programmering? Du er på det rigtige sted. Vi har en komplet tutorial på begynderniveau til Arduino, der dækker alt fra bunden. I denne gratis Arduino Tutorial for begyndere guide, vi vil tage et kig på Introduktion til Arduino platform, komme i gang med Arduino IDE, forskellige typer af Arduino boards, og en masse DIY projekter ved hjælp af Arduino. Tjek det ud!
lad os begynde at lære Arduino
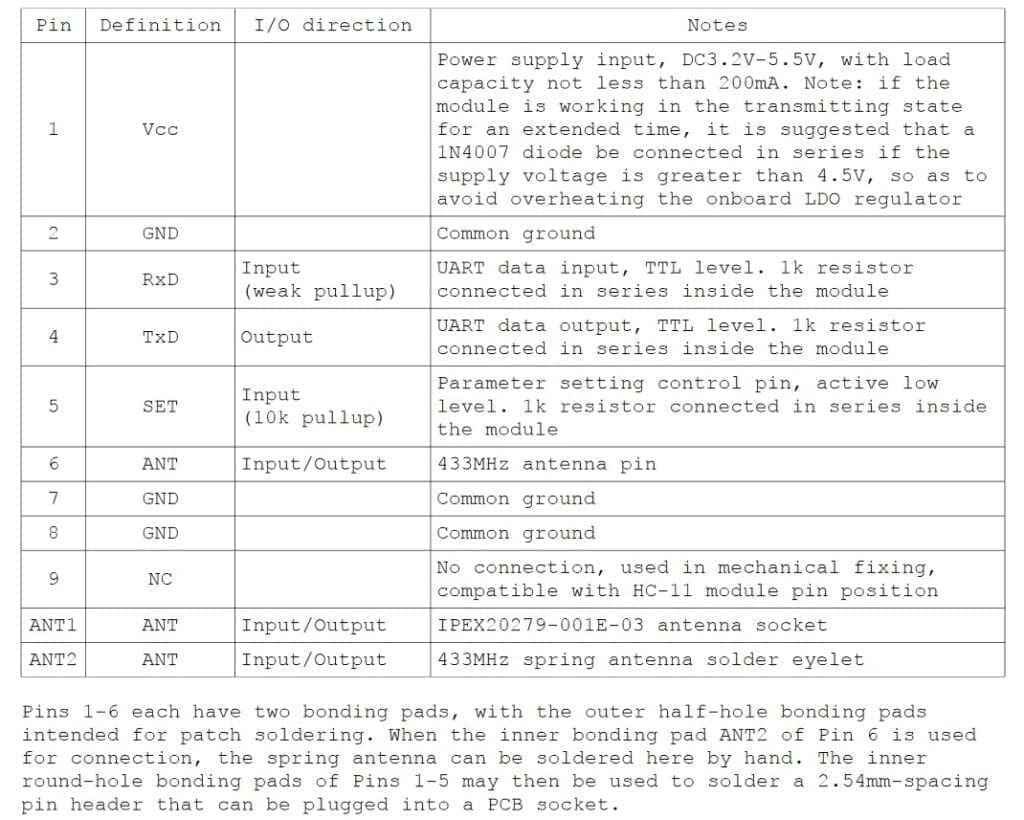
HC12
HC 12 er et rigtig billigt trådløst langdistancemodul, der kan bruges til trådløs seriel kommunikation over en lang afstand på op til 1,7 KM. Modulet er virkelig kompakt letvægts og breadboard-venlige, hvilket gør dette til den bedste trådløse controller til vores projekt.

Pinout
test af HC12-forbindelse
#include <SoftwareSerial.h>SoftwareSerial HC12(10, 11); // HC-12 TX Pin, HC-12 RX Pinvoid setup() {Serial.begin(9600); // Serial port to computerHC12.begin(9600); // Serial port to HC12}void loop() {while (HC12.available()) { // If HC-12 has dataSerial.write(HC12.read()); // Send the data to Serial monitor}while (Serial.available()) { // If Serial monitor has dataHC12.write(Serial.read()); // Send that data to HC-12}}
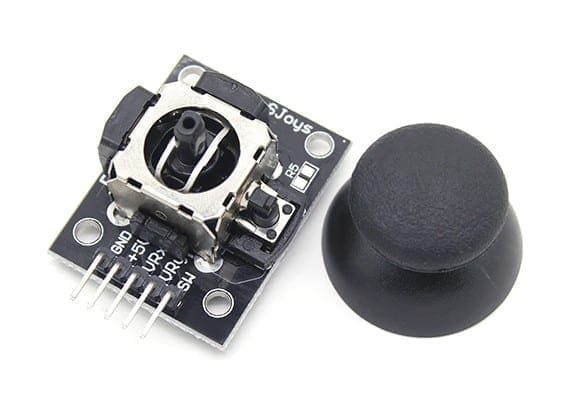
Joystick
dette er den mest anvendte robot controller, der leveres med forskellige robot DIY robot kit/robot arm kit, der er bygget til at arbejde med arduino. Designet er ret simpelt og er meget nemt at bruge. Det bruger to potentiometre til at beregne bevægelsen i h-aksen og y-aksen og en kontakt for at mærke knaptrykket.
dette kan nemt tilsluttes Arduinos analoge stifter og læse analoge værdier direkte.
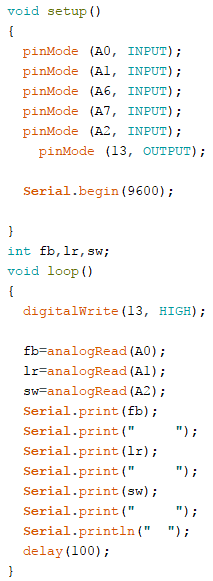
Hent
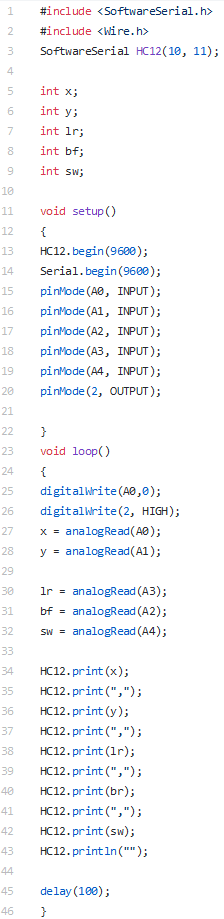
før du uploader hovedkoden, skal du sørge for, at dit joystick fungerer ved hjælp af denne kode. Hent koden fra ovenstående link. I dette eksempel er det, vi laver,simpelthen at indsamle de analoge dataudgange fra joysticket ved hjælp af de analoge stifter (A0, A1, A2) fra arduino. Disse værdier gemmes i variablerne og udskrives senere på den serielle skærm.
vi deler dette indlæg i to dele
1 – Pick and Place Robot Remote Controller
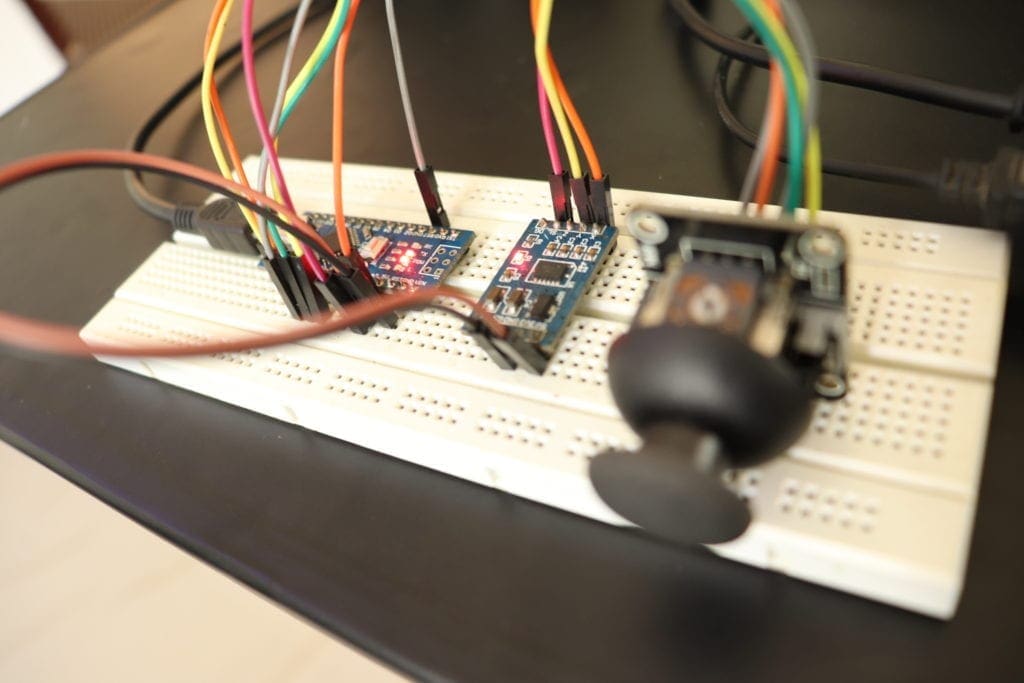
senderen består af et brødbræt, hvor vi monterer alle sensorer og komponenter for at få de data, der bruges til at drive pick and place robot og robotarmen. Dette inkluderer et accelerometer, et joystick og et HC12-modul.
vi bruger accelerometeret til at styre robotarmen og joysticket til at styre roboten. For nu bruger vi joystick-knappen til at lukke robothånden. Dataene fra disse sensorer overføres trådløst til DIY-robotten ved hjælp af et HC12-modul.
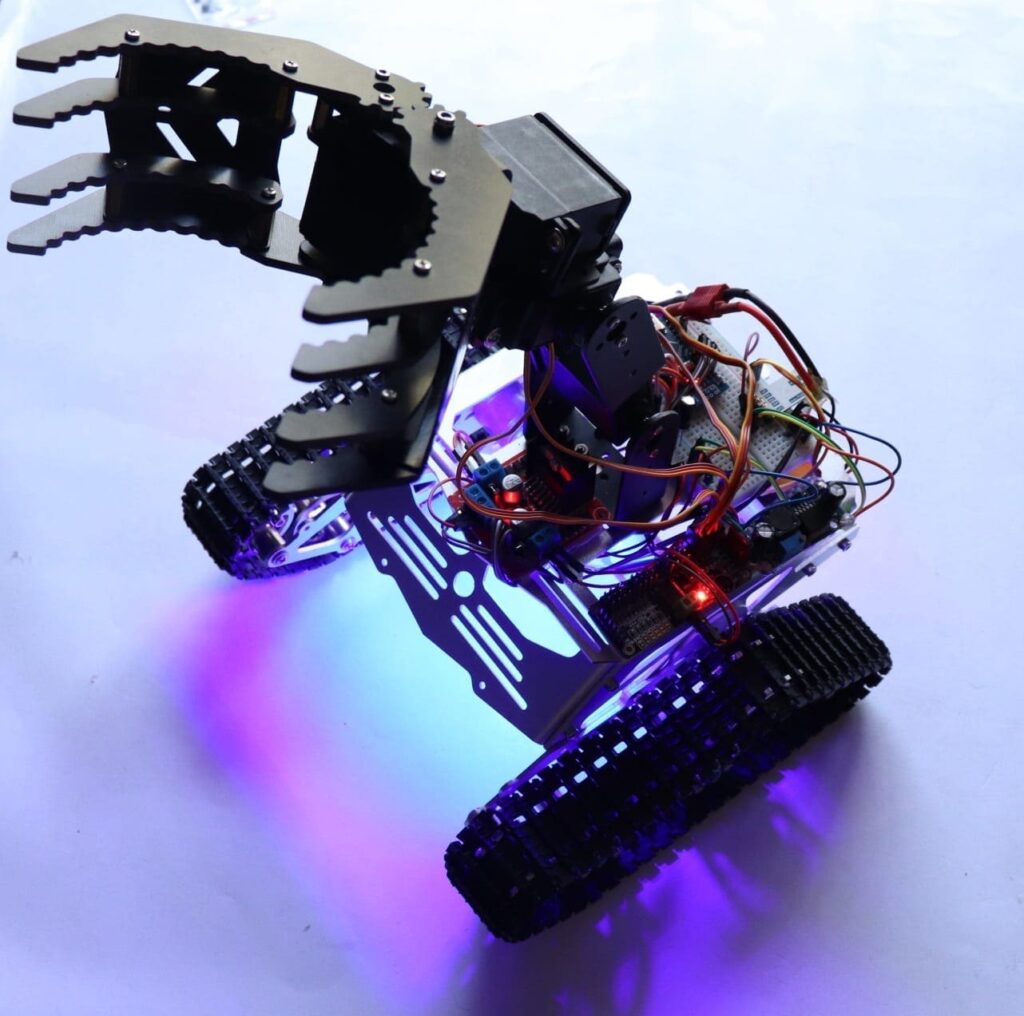
2-Pick and Place Robot
her vil jeg fortælle dig, hvordan du laver en robotarm, bygger en robot og monterer armen oven på roboten. Du lærer også, hvordan du programmerer Arduino til at læse dataene fra det trådløse kommunikationsmodul – HC12, behandle det, og hvordan man fjernbetjener robotarmen med Arduino sammen med roboten.
det har aldrig været så nemt at lære DIY Robotics!
DIY Robotics er en sjov og nem ting, du kan lære inden for få minutter, hvis du har en ordentlig guide. Vil du lære robotik, men ved ikke, hvor du skal starte? Så er det til dig. Her hjælper vi dig med at komme i gang med DIY Robotics med nemme at følge, 100% gratis, trinvise instruktioner, der starter fra Robotics basics, dele af Robot, og så starter vi komplette trinvise vejledninger. Her finder du også en fantastisk samling af Robotics-Projektvejledninger fra begynderniveau til avanceret, så du kan komme i gang med DIY Robotics.
begynd at lære robotik
Del 1 – fjernbetjeningen
som tidligere nævnt er denne DIY-Robot en fjernstyret robot. Så i controllersektionen har vi et brødbræt, et joystick – til at kontrollere robotens bevægelse og lukning og åbning af robotens knytnæve, et accelerometer – til at bevæge robotarmen og et trådløst modul til at overføre disse data til robotten.
forbindelser
tilslut blot alle komponenterne som vist nedenfor. Vi vil drive Arduino med en 5V strømbank og bruge arduino ‘ s 5 V Vout til at tænde alle de andre moduler.
fjernbetjeningen PCB
i min tidligere video viste jeg, hvordan du laver denne trådløse fjernbetjening til din RC-Robot ved hjælp af et breadboard accelerometer, knapper og et HC12 trådløst modul. Hvis du ikke har set det endnu, Se venligst nedenstående video først. Fordi vi vil bruge den Fjernbetjening til at styre denne robot.
grundlæggende hvad denne fjernbetjening gør er, at den læser analoge og digitale data fra sensorer som accelerometer knapper joystick og gemmer dem i separate variabler. Disse variabler kombineres sammen for at danne en enkelt lang streng, og denne streng sendes til vores robot ved hjælp af det trådløse HC12-modul.
tegning skemaer og PCB Design ved hjælp af Altium
så jeg brugte Altium Designer til at tegne kredsløbet og designe PCB. Det er et kraftfuldt værktøj, der kan bruges til at designe og oprette dine egne PCB til dit projekt samt komplekse og multiplayer PCB til industriel brug. Her er linket til Altium prøveversion. Så sørg for at tjekke det ud.
kredsløb
jeg lavede et kredsløb, der omfattede alle komponenter: joysticket, accelerometer, Arduino nano og hc12 modul forbundet til GPIO pin af arduino og samlet det på en breadboard.

det fungerede fejlfrit, men problemet var, hele brættet så virkelig rodet ud med alle jumperledningerne, der gik her og der. Så jeg besluttede at gå med PCB.
i PCB-versionen tilføjede jeg 4 kontakter, som jeg vil bruge til det næste projekt.
jeg tilføjede også en 7805 regulator, som vil hjælpe mig med at give en indgangsspænding mellem 7V og 35v, så jeg kan bruge en 5V USB strømforsyning, 9V batteri eller endda 12 V Lipo batteri uden problemer. Jeg har også tilføjet nogle indikator lysdioder, der vil lade mig vide, hvis noget stoppede med at arbejde. Du finder kredsløbet i nedenstående link.
PCB Layout
Altium PCB designer kan også bruges til at lave PCB layout. Dette er det layout, jeg lavede ved hjælp af kredsløbet. Som du kan se, er dette et dual-layer PCB, hvilket betyder, at routing er der på begge sider – oversiden såvel som undersiden.

på venstre side af brættet forlod jeg noget tomt rum for at holde mine batterier nu har jeg Gerber-filen med mig. Alt hvad jeg skulle gøre er at bestille PCB.
når jeg fik alle komponenterne, lodde jeg dem alle sammen, og dette er min sidste PCB. Du ser, alle komponenter er forbundet til bestyrelsen nu.
int x;int y;int lr;int bf;int sw;void setup(){ Serial.begin(9600);pinMode(A0, INPUT);pinMode(A1, INPUT);pinMode(A2, INPUT);pinMode(A3, INPUT);pinMode(A4, INPUT);pinMode(2, OUTPUT);}void loop(){digitalWrite(A0,0);digitalWrite(2, HIGH);x = analogRead(A0);y = analogRead(A1);lr = analogRead(A2);bf = analogRead(A3);sw = analogRead(A4);Serial.print("Accelerometer");Serial.print("X = ");Serial.println(x);Serial.print("Y = ");Serial.println(y);Serial.println("");Serial.print("Joy Stick");Serial.println("");Serial.print("Left/Right = ");Serial.println(lr);Serial.print("Back/Forward = ");Serial.println(bf);Serial.print("Switch = ");Serial.println(sw);Serial.println("");Serial.println("");delay(250);}
når denne kode er uploadet, skal du starte den serielle skærm og kontrollere, om alle disse værdier vises korrekt.
så kan du uploade den rigtige kode nedenfor.
kode
du skal blot hente nedenstående kode ved hjælp af hent linket nedenfor og uploade den til din controller.
Hent
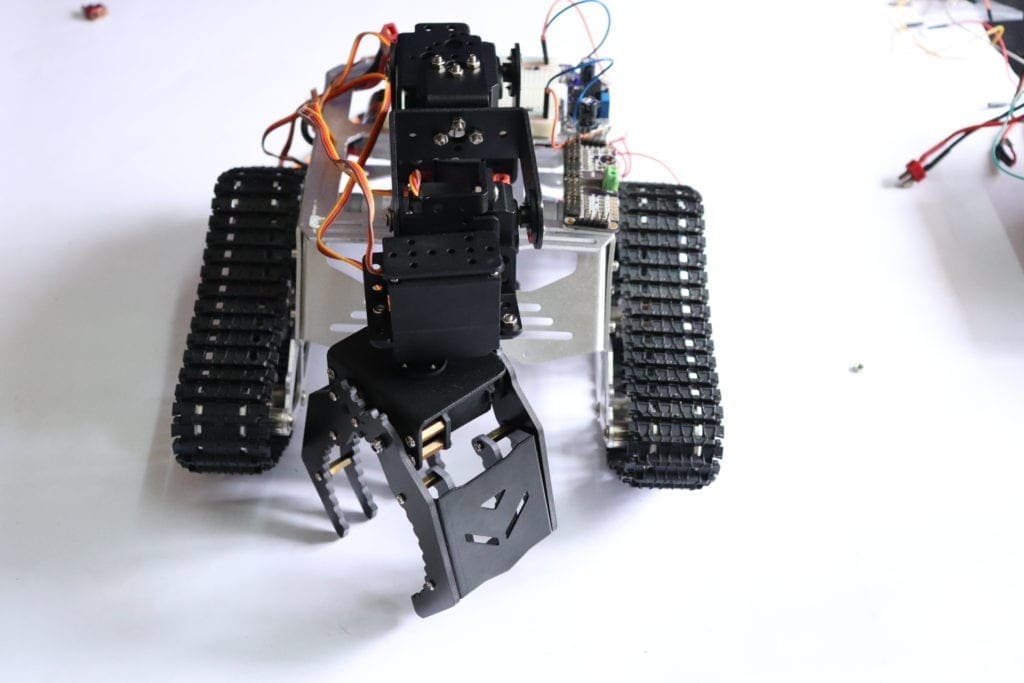
Del 2-robotten
hoveddelen af robotten er chassiset, hvor vi monterer alle komponenter inklusive armen.
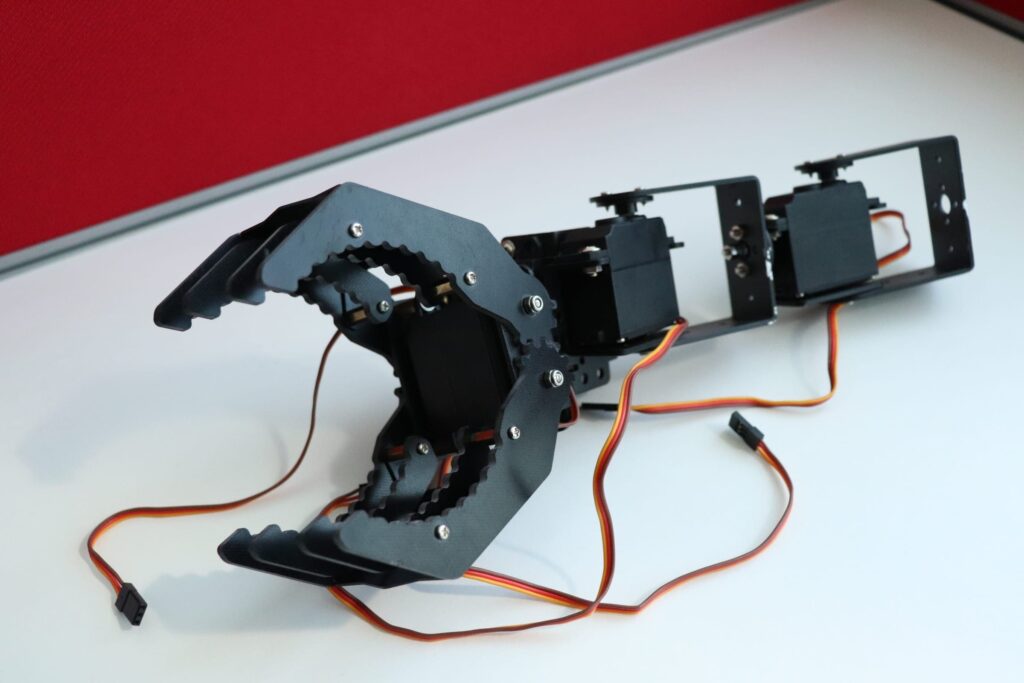
jeg fik robotarmsættet fra banggood.com. Denne robotarm er lavet af aluminium af god kvalitet og er virkelig let. Denne har så mange monteringspunkter, som giver os mulighed for at oprette forbindelse til ethvert robotkroppe/chassis uden at bore monteringshuller.
Klik her for at tjekke det ud
der er 4 servomotorer, der giver robotarmen i alt 3 frihedsgrader. Servomotorerne er inkluderet, og arbejdsspændingen er 4,8-6V.
du kan enten købe dette sammen med servomotoren, eller du kan købe dem separat.
chassiset, jeg brugte til at lave denne pick and place robot, er noget, jeg gerne vil tale om. Jeg fik dette kit banggood.com. ikke kun denne, de har så mange typer robotrammer, motorer og næsten alle sensorer til at udføre Arduino, raspberry pi og andre elektronik-og hobbyprojekter. Du vil få alle disse ting til en billig pris med virkelig hurtig og kvalitet forsendelse.
og det fantastiske ved dette sæt er, at de leverer alle de værktøjer, du har brug for til at samle rammen sammen.
Hent dit DIY Robot Kit fra BangGood
Klik her for at tjekke det ud!!
Servomotorstyring
PCA9685 er en 16-kanals 12-Bit I2C-busstyret Servomotordriver. Føreren kan meget nemt tilsluttes din arduino, Raspberry Pie og nemt programmeres til at styre enkelt eller flere servomotorer og lave dit eget RC-fly, bil, skib, firkant, sekskant eller noget, du vil have.
Følg dette link for at vide mere om servomotordriveren.
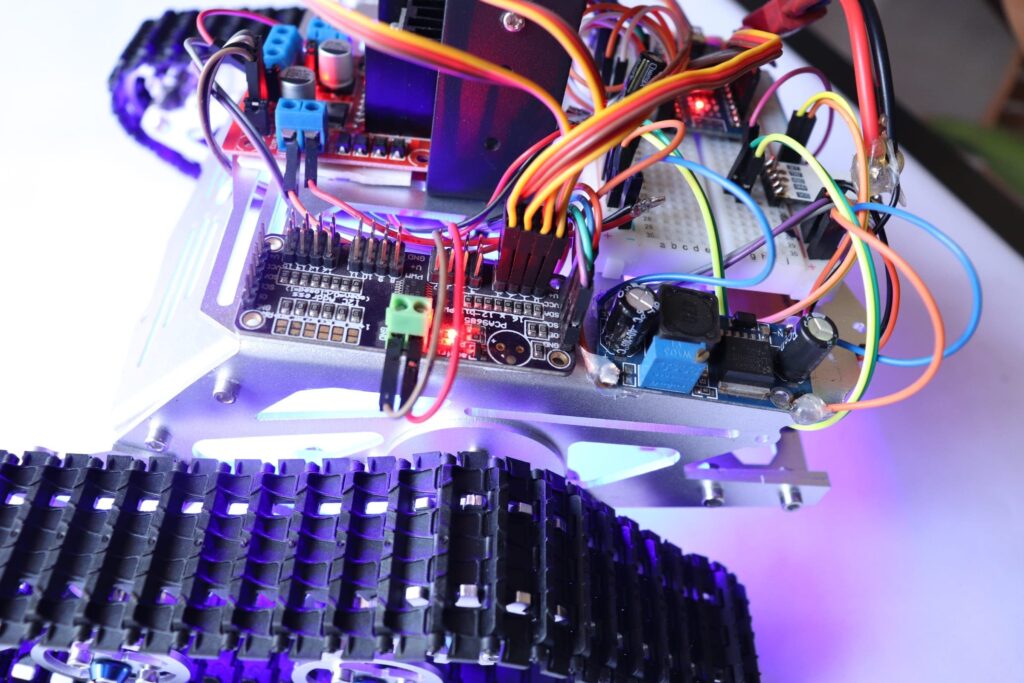
Vælg og placer Robotforbindelser
her bruger vi en 12 V strømforsyning til at tænde hele robotten. Vi fodrer den rå 12 Volt til LED og motor driver IC spænding i for motor.
så bruger vi en regulator til at træde ned spænding til 5V og fodre den til Arduino, HC12 og servomotor driver.
du kan køre DC-motorerne ved hjælp af en god motor driver IC. I dette projekt vil jeg bruge Dual H Bridge Motor Driver IC – L293D, som kan styre to servomotorer ad gangen.
For flere detaljer om kørsel DC motorer ved hjælp af L293D IC Klik her. Hvis du er ny på dette, er det bedre at gennemgå dette, inden du går videre til næste trin for at få en bedre forståelse af projektet.
tilslut blot alle komponenterne som vist nedenfor.
vi vil drive Arduino med en 5V strømbank og bruge arduino ‘ s 5 V Vout til at tænde alle de andre moduler.
Arduino – Servo motor Driver
- 5 Vout – VCC Arduino
- Gnd – Gnd
- SDA – SDA
- SCL – SCL
Arduino – HC12
- 5 Vout – VCC Arduino
- Gnd – Gnd
- 10 – TX
- 11 – Rx
Servo motor Driver – Servo Motor
- Servo 1 – Port 000
- Servo 2 – Port 001
- Servo 3 – Port 002
- Servo 4 – Port 003
Arduino – L293D
- Pin 2 – Motor 1 A
- Pin 3 – Motor 1 B
- Pin 4 – Motor 2 A
- Pin 5 – Motor 2 B
L293D
H-broen fungerer kun, hvis Aktiveringsstiften er indstillet til logik 1
en ting at huske på, mens du bruger denne IC er, at der er to ben, hvor vi skal levere indgangseffekten. Pin 8 og Pin 16; begge er til helt forskellige formål. Pin 9 er til kørsel af motoren, der kan håndtere en spænding på 6 V til 30 Volt og Pin 16 som vil tænde IC for det interne kredsløb. Under ingen omstændigheder bør du ikke udveksle disse to stifter, ellers kan det brænde chippen af.
kode
du skal blot hente nedenstående kode ved hjælp af hent linket nedenfor og uploade det til dig DIY robot og du vil være god til at gå.

Hent
Lets Ride!!!
når koden er uploadet til din pick and place robot, kan du slutte din robot til en 12 V strømkilde og din robot trådløse controller til en 5v strømkilde.
nu skal du være i stand til at styre robotten eksternt ved hjælp af den trådløse controller.
dette er bare en begyndelse. Vi, RootSaid-gruppen arbejder på en trådløs kontrolhandske, der kan bruges til at styre hele roboten, herunder robotarmen. Men der er noget sejt ved denne handske.
denne handske kan registrere håndbevægelser uden Bøjningssensor. Ja, du hørte det rigtigt. Vil du vide mere? Bliv en del af RootSaid.
Tilmeld RootSaid hjemmeside ved blot at indtaste din e-mail-ID nedenfor. Du vil modtage meddelelse, når tutorial er tilgængelig for dig at rode med.