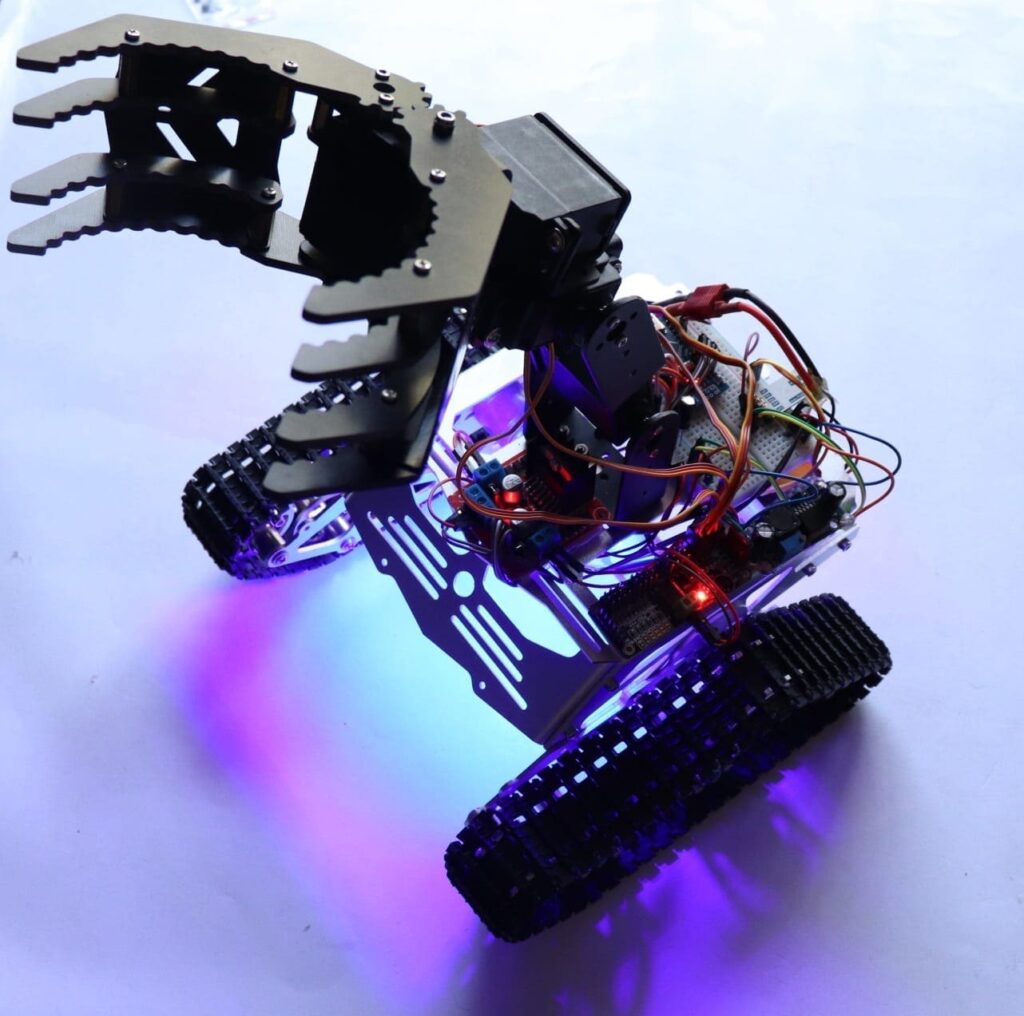
doufám, že jste prošli úvodní částí Spinel Crux L2 – Arduino Pick and Place Robot s robotickým ramenem. Vypadá skvěle pod zářícími světly, že? Proč ne stavět jeden pro sebe? Zde se naučíme, jak postavit robota a připojit na něj robotické rameno a postavit si vlastního robota pro výběr a umístění.
poskytneme vám návrh, kód, Schémata zapojení a odkazy na nákup vlastního robotického ramene, sady robotů, podvozku a senzorových modulů použitých v tomto projektu.
Zkuste si sami vytvořit a pokud jste s projektem uvízli, můžete nás vždy kontaktovat nebo se zeptat na své dotazy v poli komentářů nebo v naší skupině WhatsApp. Takže bez dalších okolků, pojďme začít s projektem!
Arduino Pick and Place Robot Video Tutorial
první vzít na videu Pick and Place robota jsme udělali.
nejprve vám řeknu něco o součástech, které jsem použil k sestavení tohoto pick and place robota.
Arduino vybrat a umístit Robot komponenty potřebné
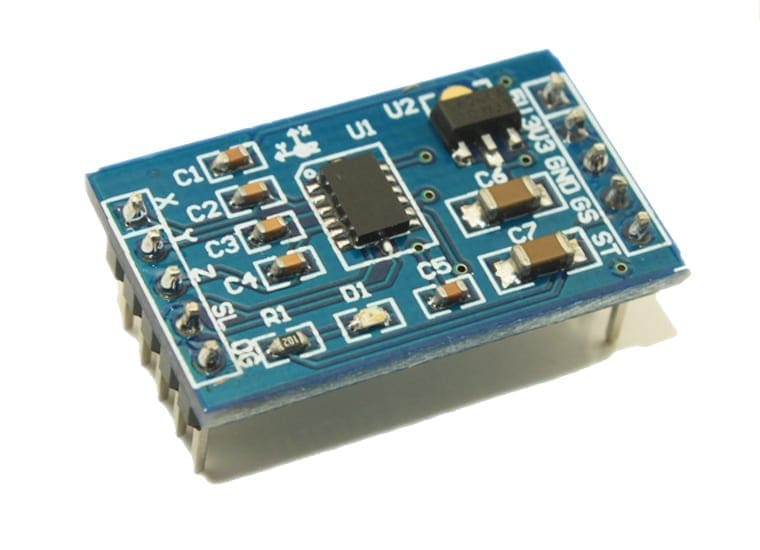
akcelerometr je senzor, který lze použít k snímání zrychlení v důsledku gravitace na různých osách působících na objekt. Pomocí toho můžeme snadno vypočítat náklon objektu vzhledem k zemi. Budeme řídit náš Spinel Crux pomocí analogových hodnot náklonu X a Y.
zde používám akcelerometr MMA7361 k ovládání směru našeho robota ovládaného gesty; můžete použít libovolný akcelerometr, který dá analogové hodnoty ve směru X a Y. Důvod, proč používám tento akcelerometr je, můžeme poskytnout 5 voltů, stejně jako 3.3 voltů jako VCC k tomuto akcelerometru. protože používám Arduino MKR1000, mohu připojit 3.3 Volt přímo z Arduina. Je také malý, velmi lehký a lze jej snadno připojit k Arduino a Raspberry Pi bez větších komplikací. pokud chcete, můžete si koupit tento akcelerometr za levnou cenu od banggood.com.
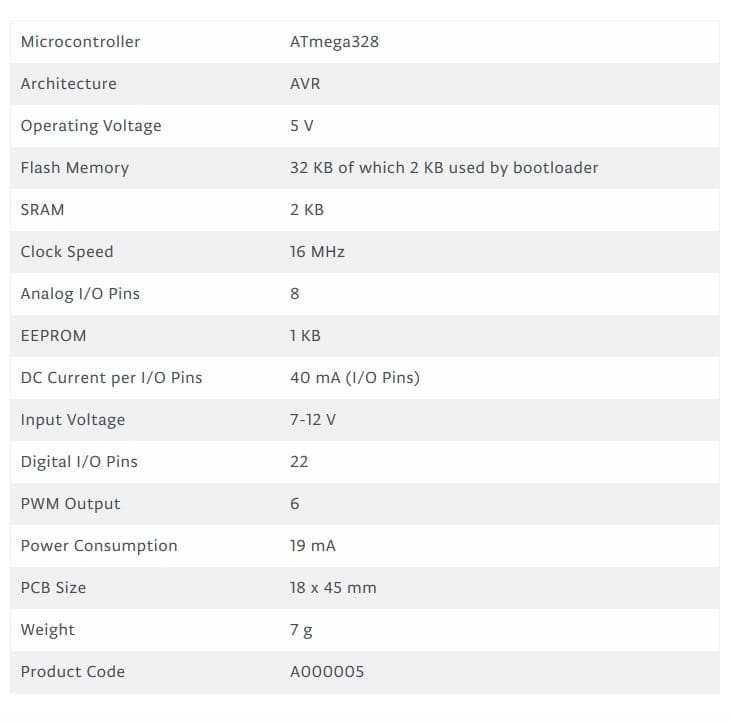
Arduino Nano
v tomto projektu budeme muset použít dva micorcontroller – jeden pro řadič, který shromáždí všechna data senzorů a předá je do bezdrátového modulu a další na robotu, který bude shromažďovat data z přijímacího modulu, zpracovávat je a řídit robotické rameno a robot pick and place. Arduino Nano je velmi malý a lze jej snadno namontovat na desku chleba. To lze snadno naprogramovat pomocí PC přes USB pomocí Arduino IDE
tato deska může být napájena pomocí mini USB portu. Přes pin 30 můžeme dodávat neregulovaný zdroj napětí 6 až 20V nebo přes pin 27, můžeme poskytnout regulovaný zdroj napájení 5V. výběr napájení bude automaticky proveden Nano deskou.
Naučte Arduino snadný způsob, jak
jste nový Arduino? Chcete zlepšit své dovednosti v programování Arduino? Jste na správném místě. Máme kompletní návod pro začátečníky pro Arduino, který pokrývá vše od nuly. V tomto bezplatném tutoriálu Arduino Pro začátečníky, podíváme se na úvod do platformy Arduino, Začínáme s Arduino IDE, různé typy desek Arduino, a mnoho DIY projektů využívajících Arduino. Koukni na to!
umožňuje začít učit Arduino
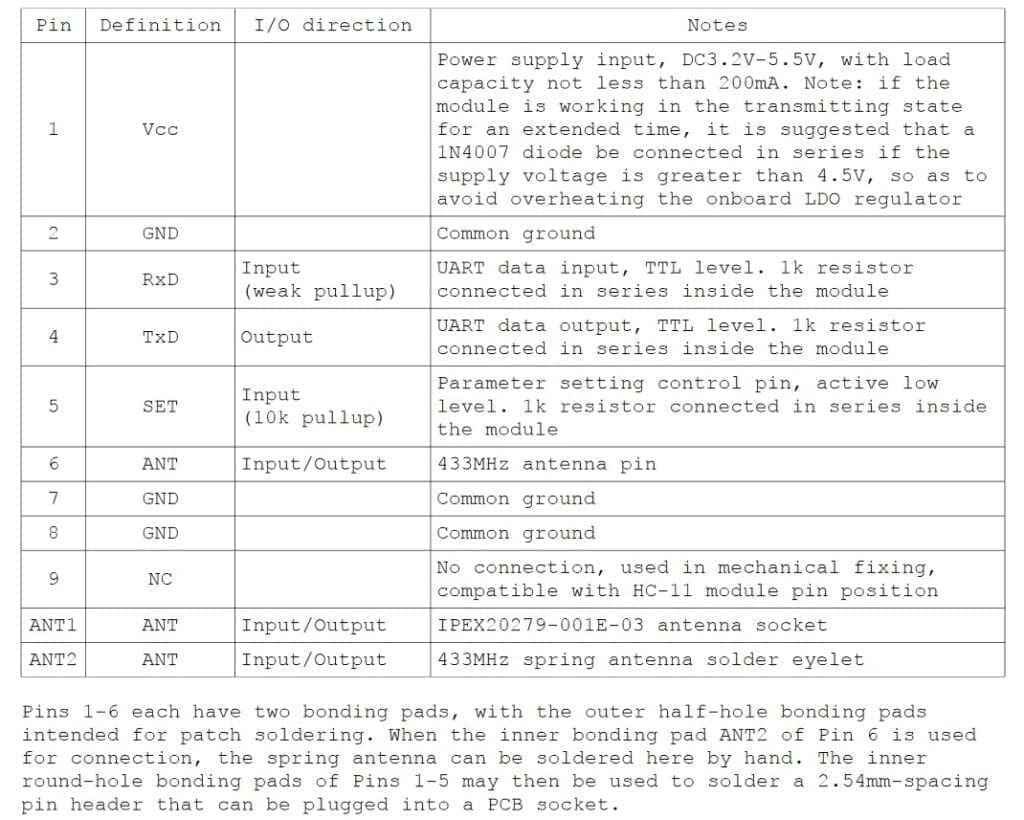
HC12
HC 12 je opravdu levný dálkový bezdrátový modul, který lze použít pro bezdrátovou sériovou komunikaci na velkou vzdálenost až 1.7 KM. Modul je opravdu kompaktní lehký a přátelský k prkénku, což z něj činí nejlepší bezdrátový ovladač pro náš projekt.

Pinout
testování připojení HC12
#include <SoftwareSerial.h>SoftwareSerial HC12(10, 11); // HC-12 TX Pin, HC-12 RX Pinvoid setup() {Serial.begin(9600); // Serial port to computerHC12.begin(9600); // Serial port to HC12}void loop() {while (HC12.available()) { // If HC-12 has dataSerial.write(HC12.read()); // Send the data to Serial monitor}while (Serial.available()) { // If Serial monitor has dataHC12.write(Serial.read()); // Send that data to HC-12}}
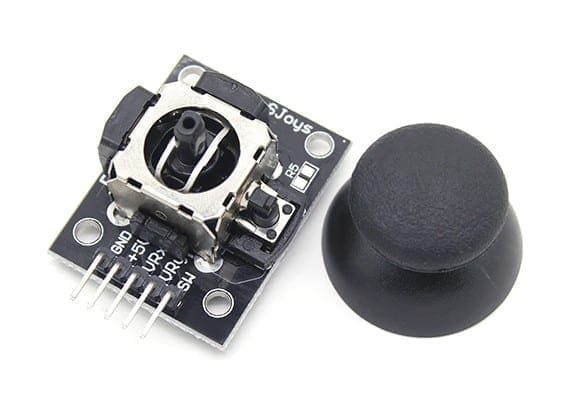
Joystick
Jedná se o nejpoužívanější robotický ovladač, který je dodáván s různými robot DIY robot kit / robot arm kit, který je postaven pro práci s arduino. Konstrukce je poměrně jednoduchá a je velmi snadno použitelná. Používá dva potenciometry pro výpočet pohybu v ose x a ose y a přepínač pro snímání stisknutí tlačítka.
to lze snadno připojit k analogovým pinům Arduina a přímo číst analogové hodnoty.
stáhnout
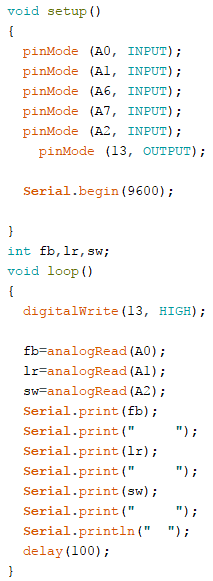
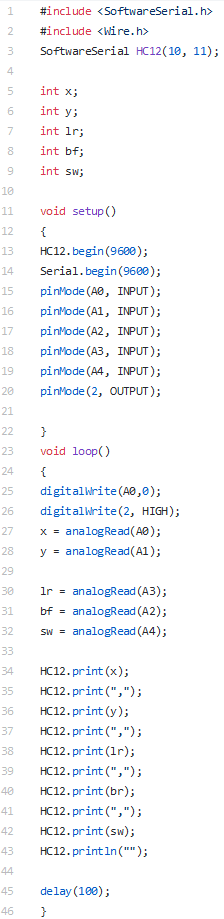
před nahráním hlavního kódu se ujistěte, že joystick funguje pomocí tohoto kódu. Stáhněte si kód z výše uvedeného odkazu. V tomto příkladu děláme jednoduše sběr dat analogových výstupů z joysticku Pomocí analogových pinů (A0, A1,A2) Arduina. Tyto hodnoty jsou uloženy v proměnných a jsou později vytištěny na sériovém monitoru.
tento příspěvek rozdělíme na dvě části
1 – Pick and Place Robot Remote Controller
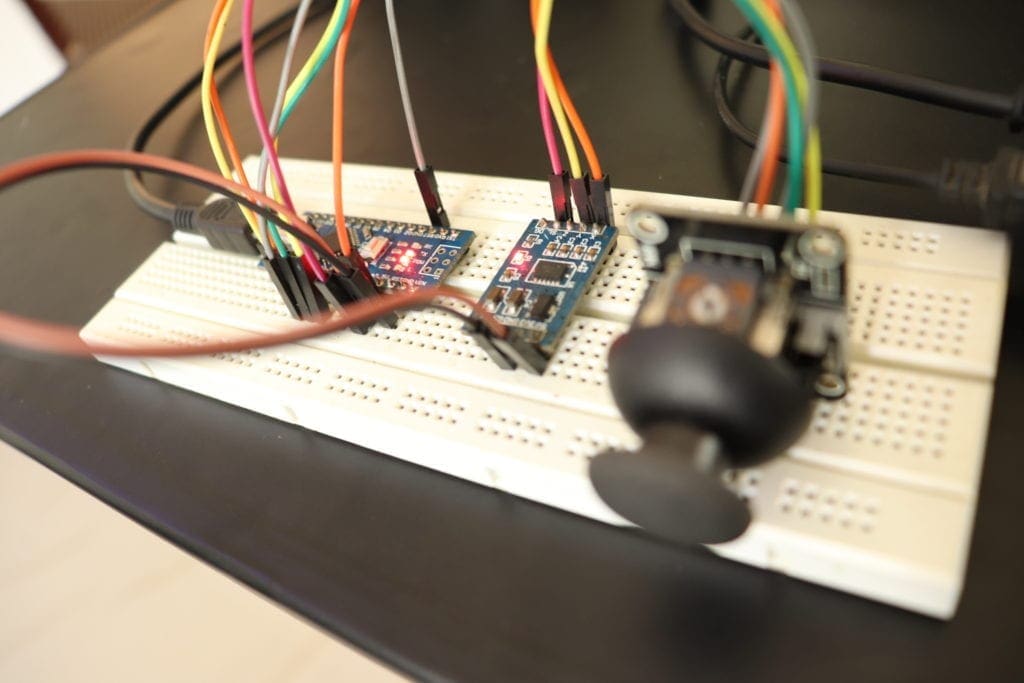
vysílač se skládá z prkénka, do kterého namontujeme všechny senzory a komponenty, abychom získali data, která se používají k řízení pick and place robota a robotického ramene. To zahrnuje akcelerometr, joystick a modul HC12.
použijeme akcelerometr k ovládání robotického ramene a joysticku k ovládání robota. Prozatím použijeme tlačítko joysticku k zavření robotické ruky. Data z těchto senzorů jsou bezdrátově přenášena do DIY robota pomocí modulu HC12.
2-Pick and Place Robot
zde vám řeknu, jak vyrobit robotické rameno, postavit robota a namontovat rameno na vrchol robota. Dozvíte se také, jak naprogramovat Arduino pro čtení dat pocházejících z bezdrátového komunikačního modulu-HC12, zpracovat je a jak dálkově ovládat robotické rameno s Arduinem spolu s robotem.
učení DIY robotiky nebylo nikdy tak snadné!
DIY Robotics je zábavná a snadná věc, kterou se můžete naučit během několika minut, pokud máte správného průvodce. Chcete se naučit robotiku, ale nevíte, kde začít? Tak tohle je pro tebe. Zde vám pomůžeme začít s DIY robotikou se snadno sledovatelnými, 100% bezplatnými pokyny krok za krokem počínaje základy robotiky, částmi robota a poté začneme kompletní návody krok za krokem. Zde najdete také úžasnou sbírku výukových programů robotických projektů od úrovně začátečníků až po pokročilé, abyste mohli začít s robotikou pro kutily.
začněte se učit robotiku
Část 1-dálkový ovladač
jak již bylo zmíněno, tento robot pro kutily je dálkově ovládaný robot. Takže v sekci Ovladače máme prkénko, joystick-pro ovládání pohybu robota a zavírání a otevírání pěsti robota, akcelerometr-pro pohyb robotické paže a bezdrátový modul pro přenos těchto dat do robota.
připojení
jednoduše připojte všechny komponenty, jak je uvedeno níže. Budeme napájet Arduino pomocí 5V power bank a používat 5 V Vout z Arduina k napájení všech ostatních modulů.
dálkový ovladač PCB
v mém předchozím videu jsem ukázal, jak si tento bezdrátový dálkový ovladač pro RC robota pomocí prkénko akcelerometr, tlačítka, a HC12 bezdrátový modul. Pokud jste to ještě neviděli, podívejte se nejprve na níže uvedené video. Protože budeme používat dálkový ovladač k ovládání tohoto robota.
v podstatě to, co tento dálkový ovladač dělá, je, že čte analogová a digitální data ze senzorů, jako je akcelerometr tlačítka joystick a ukládat je do samostatných proměnných. Tyto proměnné budou sloučeny do jednoho dlouhého řetězce a tento řetězec bude odeslán našemu robotu pomocí bezdrátového modulu HC12.
kreslení schémat a návrh DPS pomocí Altium
tak jsem použil Altium Designer nakreslit obvod a navrhnout DPS. Jedná se o výkonný nástroj, který lze použít k návrhu a vytvoření vlastních PCB pro váš projekt, stejně jako komplexní a multiplayerové PCB pro průmyslové použití. Zde je odkaz na zkušební verzi Altium. Takže se ujistěte, že jste to zkontrolovali.
obvod
vytvořil jsem obvod, který zahrnoval všechny komponenty: joystick, akcelerometr, Arduino nano a hc12 modul připojen k GPIO pin arduino a sestaven na prkénku.

fungovalo to bezchybně, ale problém byl, celá deska vypadala opravdu chaoticky se všemi propojovacími dráty, které sem a tam šly. Tak jsem se rozhodl jít s PCB.
ve verzi PCB jsem přidal 4 přepínače, které budu používat pro další projekt.
přidal jsem také regulátor 7805, který mi pomůže zajistit vstupní napětí mezi 7V a 35V, abych mohl bez problémů používat napájení 5V USB, 9V baterii nebo dokonce 12 V Lipo baterii. Také jsem přidal několik indikátorů LED, které mi dají vědět, jestli něco přestane fungovat. Okruh najdete v níže uvedeném odkazu.
PCB Layout
Altium PCB designer lze také použít k rozvržení PCB. Toto je rozvržení, které jsem vytvořil pomocí obvodu. Jak vidíte, jedná se o dvouvrstvou desku plošných spojů, což znamená, že směrování je na obou stranách-na horní i spodní straně.

na levé straně desky jsem nechal nějaký prázdný prostor, abych udržel své baterie, teď mám s sebou soubor Gerber. Vše, co jsem musel udělat, je objednat PCB.
jakmile jsem dostal všechny komponenty, pájel jsem je všechny dohromady a toto je můj konečný PCB. Vidíte, všechny komponenty jsou nyní připojeny k desce.
int x;int y;int lr;int bf;int sw;void setup(){ Serial.begin(9600);pinMode(A0, INPUT);pinMode(A1, INPUT);pinMode(A2, INPUT);pinMode(A3, INPUT);pinMode(A4, INPUT);pinMode(2, OUTPUT);}void loop(){digitalWrite(A0,0);digitalWrite(2, HIGH);x = analogRead(A0);y = analogRead(A1);lr = analogRead(A2);bf = analogRead(A3);sw = analogRead(A4);Serial.print("Accelerometer");Serial.print("X = ");Serial.println(x);Serial.print("Y = ");Serial.println(y);Serial.println("");Serial.print("Joy Stick");Serial.println("");Serial.print("Left/Right = ");Serial.println(lr);Serial.print("Back/Forward = ");Serial.println(bf);Serial.print("Switch = ");Serial.println(sw);Serial.println("");Serial.println("");delay(250);}
jakmile je tento kód nahrán, spusťte Sériový monitor a zkontrolujte, zda jsou všechny tyto hodnoty správně zobrazeny.
pak můžete nahrát skutečný kód níže.
kód
jednoduše stáhněte níže uvedený kód pomocí níže uvedeného odkazu ke stažení a nahrajte jej do svého řadiče.
stáhnout
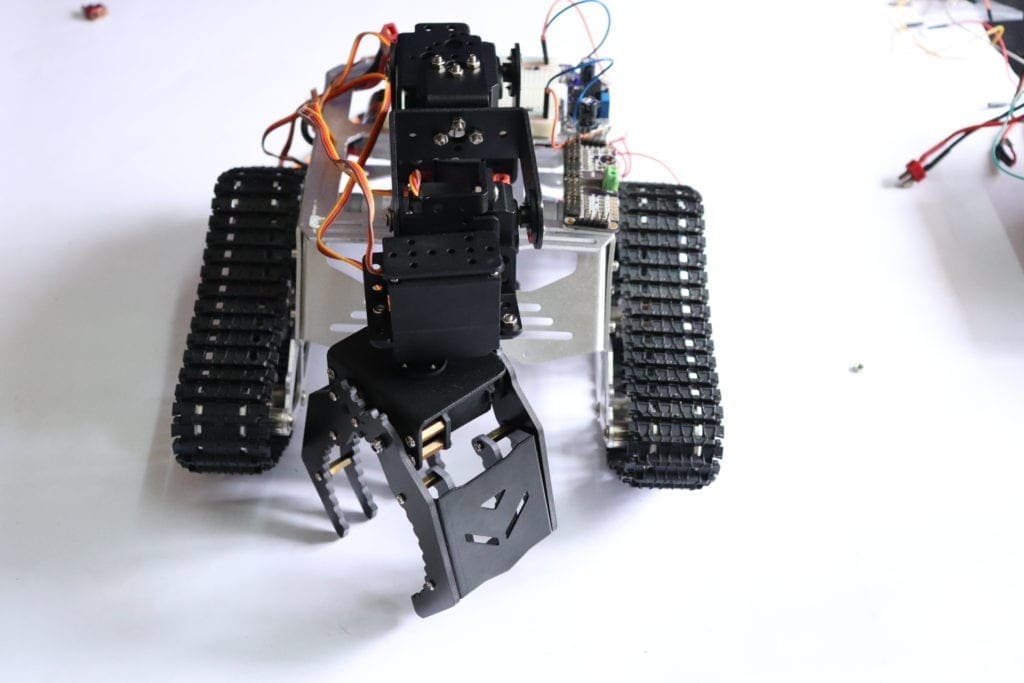
Část 2-Robot
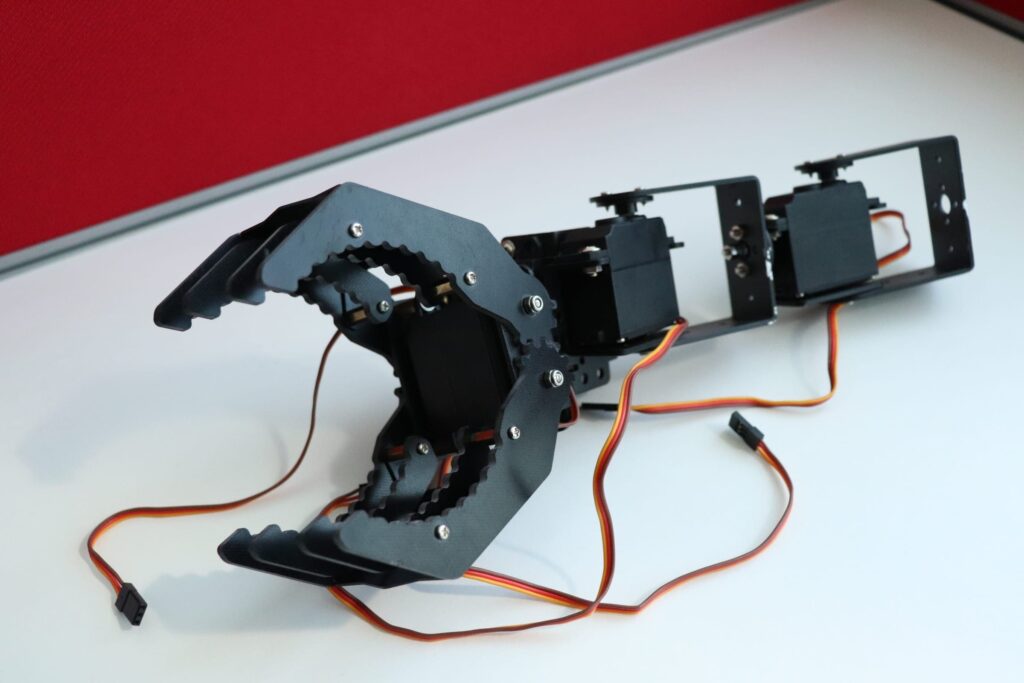
hlavní částí robota je podvozek, do kterého namontujeme všechny komponenty včetně ramene.
sadu robotických paží jsem dostal od banggood.com. Toto robotické rameno je vyrobeno z kvalitního hliníku a je opravdu lehké. Ten má tolik montážních bodů, které nám umožní připojit se k jakémukoli tělu/podvozku robota bez vrtání montážních otvorů.
Klikněte zde pro kontrolu
k dispozici jsou 4 servomotory, které dávají robotickému rameni celkem 3 stupně volnosti. Servomotory jsou součástí dodávky a pracovní napětí je 4.8-6V.
můžete si je koupit společně se servomotorem nebo je můžete zakoupit samostatně.
podvozek, který jsem použil pro výrobu tohoto pick and place robota, je něco, o čem bych chtěl mluvit. Mám tuhle soupravu. banggood.com, nejen tento, mají tolik typů robotických rámů, motorů a téměř všechny senzory pro dělání Arduino, raspberry pi a dalších elektronických a hobby projektů. Všechny tyto věci získáte za levnou cenu s opravdu rychlou a kvalitní dopravou.
a skvělá věc na této sadě je, že poskytují všechny nástroje, které potřebujete k sestavení rámu dohromady.
Pořiďte si DIY Robot Kit od BangGood
Klikněte zde a podívejte se na to!!
řízení servomotoru
Pca9685 je 16 kanálový 12 bitový ovladač servomotoru PWM I2C-bus. Řidič se může velmi snadno připojit k vašemu arduino, malinový koláč a snadno naprogramovat pro ovládání jednoho nebo více servomotorů a vytvořit si vlastní RC letadlo, auto, loď, quadrapod, hexapod nebo cokoli chcete.
kliknutím na tento odkaz se dozvíte více o ovladači servomotoru.
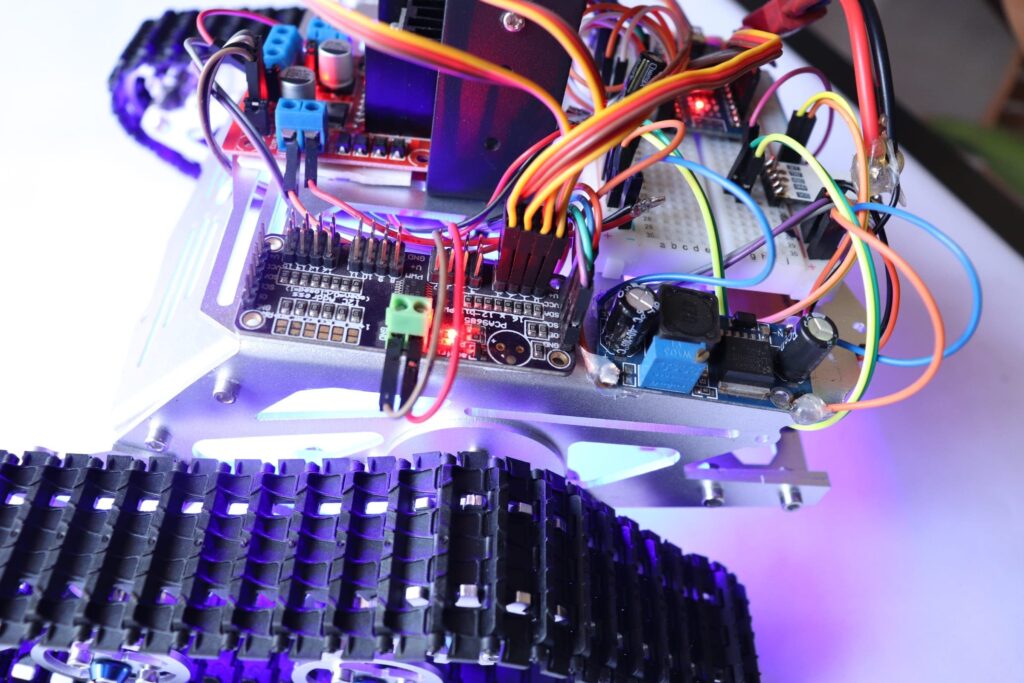
Vyberte a umístěte připojení robotů
zde budeme používat napájení 12 V pro napájení celého robota. Přivádíme surový 12 Volt na LED a IC napětí řidiče motoru pro motor.
pak použijeme regulátor pro snížení napětí na 5V a přivedeme jej do ovladače Arduino, HC12 a servomotoru.
stejnosměrné motory můžete řídit pomocí dobrého ovladače motoru IC. V tomto projektu budu používat ovladač Dual h Bridge Motor IC-L293D, který může ovládat dva servomotory najednou.
pro více informací o řízení stejnosměrných motorů pomocí L293D IC Klikněte zde. Pokud jste v tom noví, je lepší to projít, než přistoupíte k dalšímu kroku, abyste lépe porozuměli projektu.
jednoduše připojte všechny komponenty, jak je uvedeno níže.
napájíme Arduino pomocí 5V power bank a použijeme 5 V Vout Arduina k napájení všech ostatních modulů.
Arduino – Servo motor Driver
- 5 Vout – VCC Arduino
- Gnd – Gnd
- SDA – SDA
- SCL – SCL
Arduino – HC12
- 5 Vout – VCC Arduino
- Gnd – Gnd
- 10 – TX
- 11 – Rx
Servo motor Driver – Servo Motor
- Servo 1 – Port 000
- Servo 2 – Port 001
- Servo 3 – Port 002
- Servo 4 – Port 003
Arduino – L293D
- Pin 2 – Motor 1 A
- Pin 3 – Motor 1 B
- Pin 4-Motor 2 a
- Pin 5-Motor 2 B
L293D
h můstek bude fungovat pouze v případě, že je aktivační kolík nastaven na logiku 1
při používání tohoto IC je třeba mít na paměti, že existují dva kolíky, kde musíme napájet vstupní energii. Kolík 8 a kolík 16; Oba jsou pro zcela odlišné účely. Kolík 9 je určen pro pohon motoru, který zvládne napětí 6 V na 30 Volt a Pin 16 který zapne IC pro vnitřní obvod. Za žádných okolností byste neměli tyto dva kolíky vyměňovat, jinak by to mohlo spálit čip.
kód
jednoduše si stáhněte níže uvedený kód pomocí níže uvedeného odkazu ke stažení a nahrajte jej do DIY robota a budete mít dobré jít.

stáhnout
Lets Ride!!!
jakmile je Kód nahrán do robota pro výběr a umístění, můžete připojit robota ke zdroji napájení 12 V a bezdrátový ovladač robota ke zdroji napájení 5V.
Nyní byste měli být schopni ovládat robota na dálku pomocí bezdrátového ovladače.
to je jen začátek. My, skupina RootSaid, pracujeme na bezdrátové ovládací rukavici, kterou lze použít k ovládání celého robota, včetně robotické paže. Ale na této rukavici je něco skvělého.
tato rukavice dokáže detekovat gesta rukou bez Flex senzoru. Ano, slyšeli jste správně. Chcete se dozvědět více? Buďte součástí RootSaid.
přihlásit Rootsaid webové stránky jednoduše zadáním své e-mailové ID níže. Obdržíte oznámení, kdykoli je k dispozici výukový program, se kterým si můžete pohrávat.