Sper că ați trecut prin partea de introducere a Spinel Crux L2-Arduino Pick and Place Robot cu braț robotizat. Se pare cool sub lumini stralucitoare dreapta? De ce să nu construiești unul pentru tine? Aici vom învăța cum să construim un robot și să conectăm un braț robotizat deasupra acestuia și să construim propriul nostru robot de alegere și plasare DIY.
vă vom oferi designul, codul, diagramele circuitului și linkurile pentru a vă cumpăra propriul braț robotizat, kit robot, șasiu și module de senzori utilizate în acest proiect.
încercați să faceți unul singur și dacă sunteți blocat cu proiectul, ne puteți contacta oricând sau puteți pune întrebările dvs. în caseta de comentarii sau în grupul nostru WhatsApp. Deci, fără alte formalități, să începem cu proiectul!
Arduino alege și locul Robot Video Tutorial
ia mai întâi la video de Pick și locul Robot care le-am făcut.
în primul rând, permiteți-mi să vă spun un pic despre componentele pe care le-am folosit pentru a construi acest Robot pick and place.
Arduino alege și locul componente Robot necesare
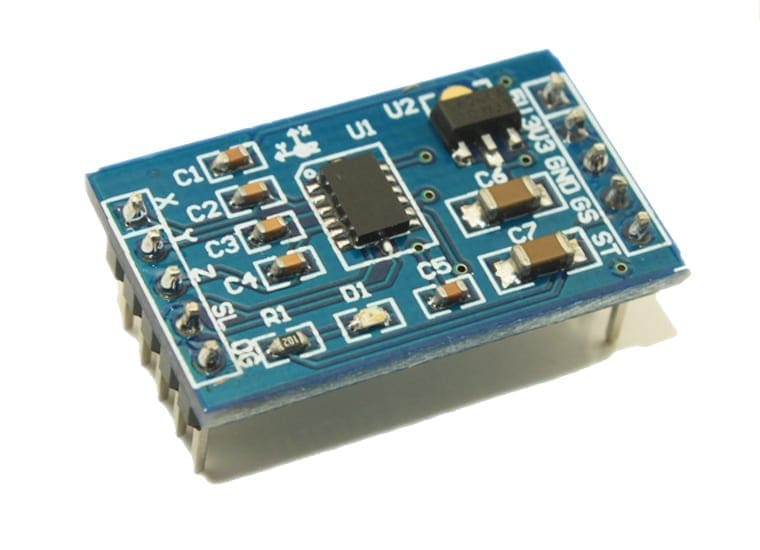
un accelerometru este un senzor care poate fi folosit pentru a simți accelerația datorată gravitației pe diferite axe care acționează asupra unui obiect. Folosind acest lucru putem calcula cu ușurință înclinarea unui obiect în raport cu solul. Vom conduce Cruxul nostru Spinel folosind valorile analogice X și Y tilt.
aici folosesc accelerometrul MMA7361 pentru a controla direcția robotului nostru controlat prin gesturi; puteți utiliza orice accelerometru care va da valori analogice în direcția X și Y. Motivul pentru care folosesc acest accelerometru este, putem oferi 5 volți, precum și 3.3 volți CA Vcc la acest accelerometru. deoarece folosesc Arduino Mkr1000, pot conecta 3.3 Volt direct de la Arduino. De asemenea, este mic foarte ușor și poate fi ușor conectat la Arduino și Raspberry Pi fără prea multe complicații. dacă doriți, puteți cumpăra acest accelerometru pentru un preț ieftin de la banggood.com.
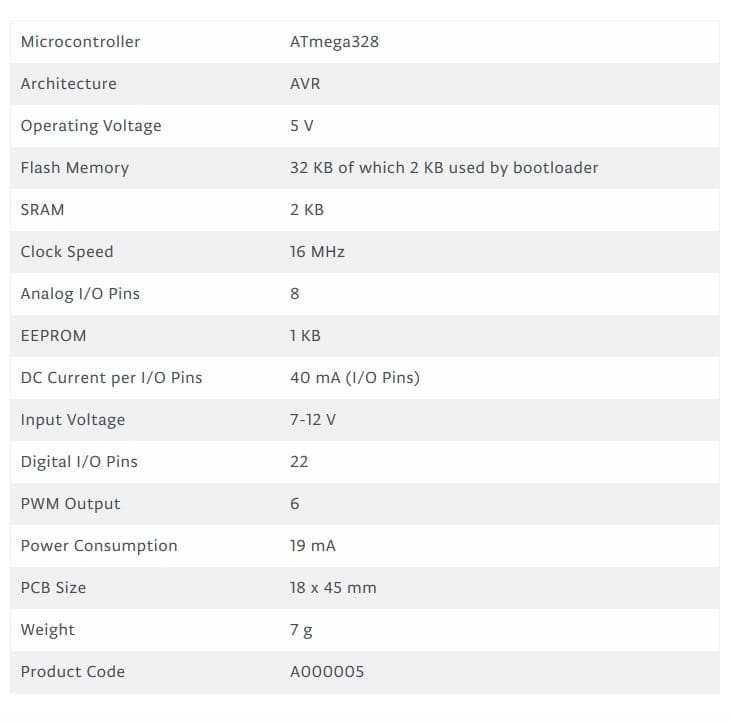
Arduino Nano
în acest proiect va trebui să folosim două micorcontroller – unul pentru controlerul care va aduna toate datele senzorului și le va transmite modulului wireless și altul pe robot, care va aduna date de la modulul receptor, le va procesa și va controla brațul robotic și robotul pick and place. Arduino Nano este foarte mic și poate fi montat cu ușurință deasupra plăcii de pâine. Acest lucru poate fi programat cu ușurință folosind un PC prin USB folosind Arduino IDE
această placă poate fi alimentată folosind portul mini USB. Prin pinul 30, putem furniza o sursă de tensiune nereglementată de 6 până la 20V sau prin pinul 27, putem oferi o sursă de alimentare reglementată de 5V. selecția de putere se va face automat de către placa Nano.
Aflați Arduino calea ușoară
sunteți nou la Arduino? Doriți să vă îmbunătățiți abilitățile în programarea Arduino? Sunteți în locul potrivit. Avem un tutorial complet la nivel de începător pentru Arduino, care acoperă totul de la zero. În acest tutorial gratuit Arduino pentru Ghidul pentru începători, vom arunca o privire la introducerea platformei Arduino, la începerea cu Arduino IDE, la diferite tipuri de plăci Arduino și la o mulțime de proiecte DIY folosind Arduino. Fii atent!
să începem să învățăm Arduino
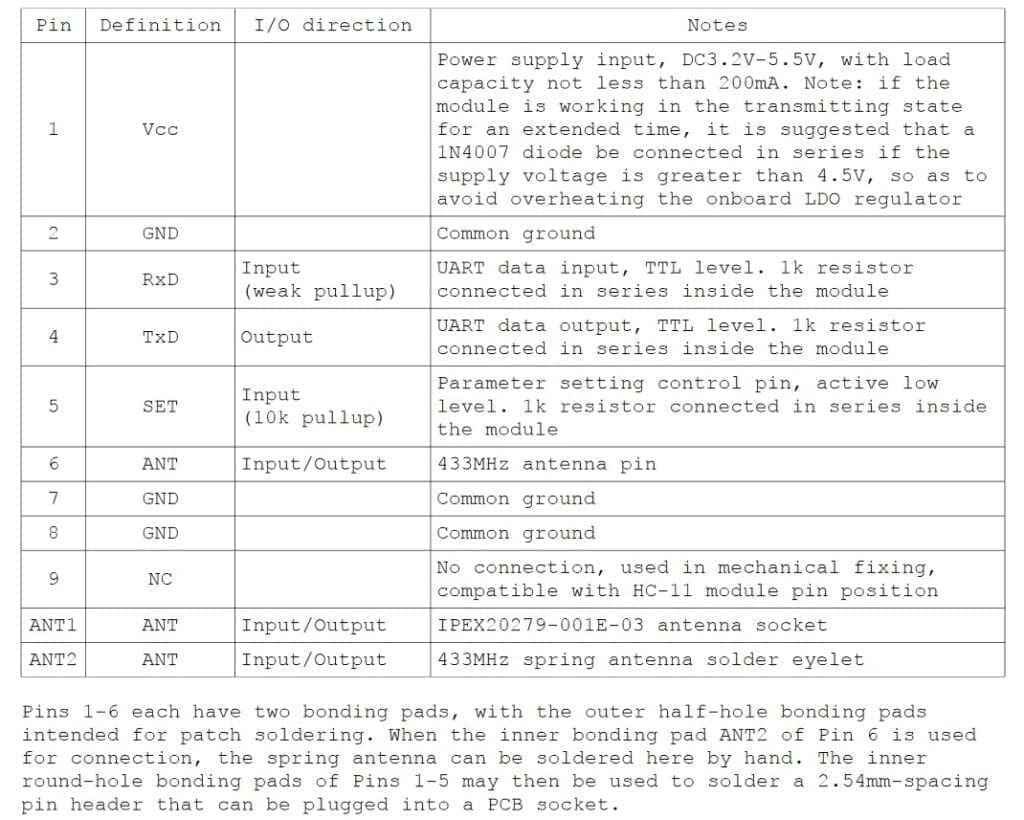
HC12
HC 12 este un modul wireless cu rază lungă de acțiune foarte ieftin, care poate fi utilizat pentru comunicații seriale fără fir pe o distanță lungă de până la 1,7 KM. Modulul este într-adevăr compact ușor și breadboard-friendly, ceea ce face acest lucru cel mai bun controler wireless pentru proiectul nostru.

Pinout
testarea conexiunii HC12
#include <SoftwareSerial.h>SoftwareSerial HC12(10, 11); // HC-12 TX Pin, HC-12 RX Pinvoid setup() {Serial.begin(9600); // Serial port to computerHC12.begin(9600); // Serial port to HC12}void loop() {while (HC12.available()) { // If HC-12 has dataSerial.write(HC12.read()); // Send the data to Serial monitor}while (Serial.available()) { // If Serial monitor has dataHC12.write(Serial.read()); // Send that data to HC-12}}
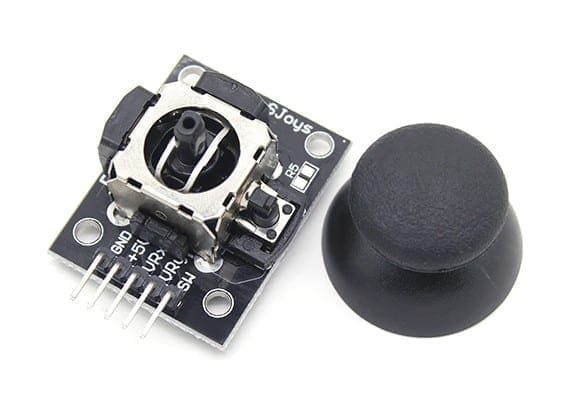
Joystick
acesta este cel mai utilizat controler robotizat care vine cu diverse kit robot DIY Robot/Kit braț robot care este construit pentru a lucra cu arduino. Designul este destul de simplu și este foarte ușor de utilizat. Utilizează două potențiometre pentru a calcula mișcarea în axa x și axa y și un comutator pentru a simți apăsarea butonului.
acesta poate fi conectat cu ușurință la pinii analogici ai arduino și poate citi direct valorile analogice.
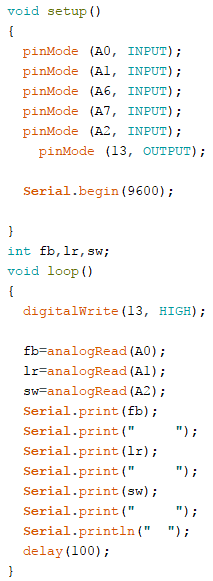
descărcați
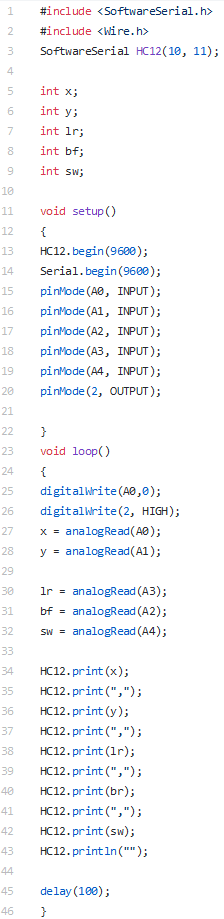
înainte de a încărca codul principal, asigurați-vă că joystick-ul funcționează utilizând acest cod. Descărcați codul de pe linkul de mai sus. În acest exemplu, ceea ce facem este pur și simplu colectarea datelor ieșiri analogice de la Joystick folosind pinii analogici (A0, A1,A2) de arduino. Aceste valori sunt stocate în variabile și sunt tipărite ulterior pe monitorul serial.
vom împărți acest post în două părți
1 – Pick and Place robot Remote Controller
transmițătorul constă dintr-un panou în care montăm toți senzorii și componentele pentru a obține datele care sunt utilizate pentru a conduce robotul pick and place și brațul robotic. Aceasta include un accelerometru, un joystick și un modul HC12.
vom folosi accelerometrul pentru a controla brațul robotic și joystick-ul pentru a controla robotul. Deocamdată, vom folosi butonul joystick pentru a închide mâna robotică. Datele de la acești senzori sunt transmise fără fir robotului DIY folosind un modul HC12.
2-robotul Pick and Place
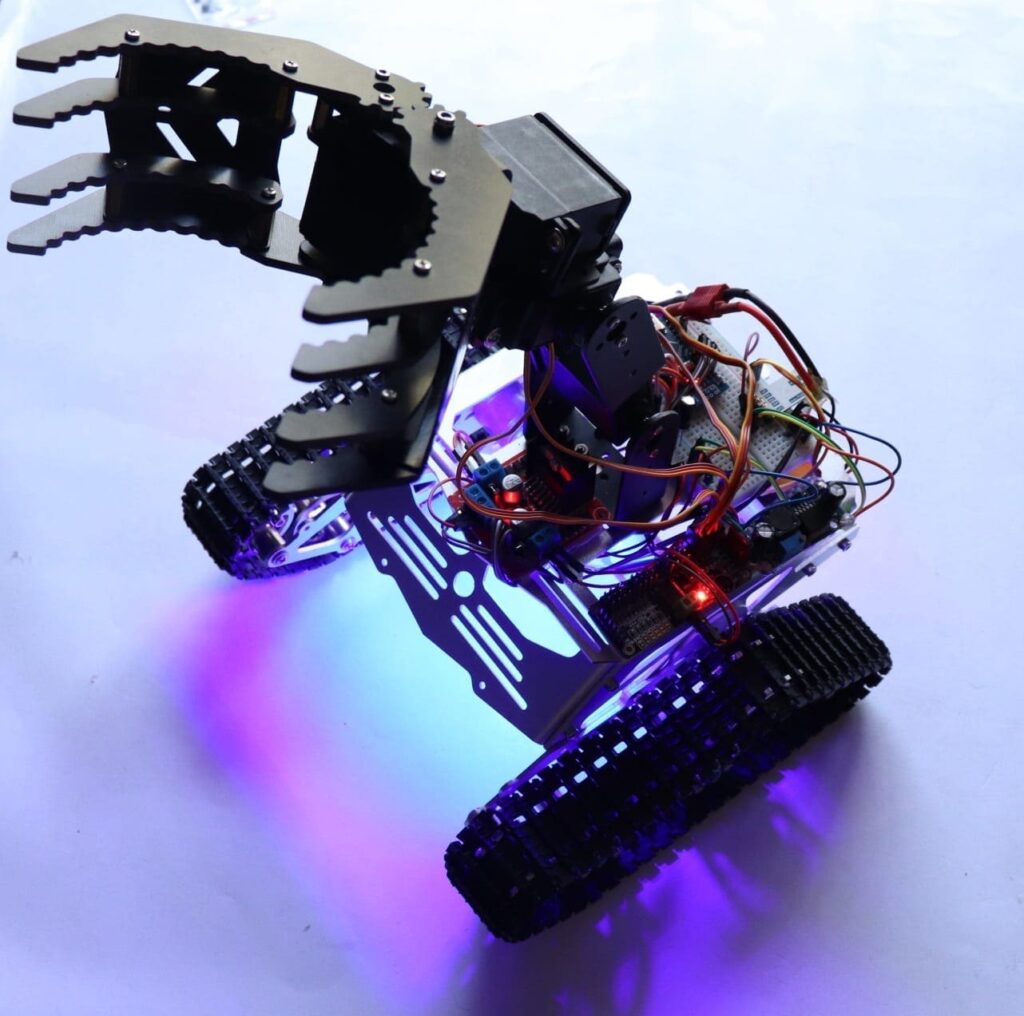
aici, vă voi spune cum să faceți un braț robotizat, să construiți un robot și să montați brațul deasupra robotului. Veți învăța, de asemenea, cum să programați Arduino pentru a citi datele provenite de la modulul de comunicații fără fir – HC12, să le procesați și cum să controlați de la distanță brațul robotic cu Arduino împreună cu robotul.
învățarea roboticii DIY nu a fost niciodată atât de ușoară!
Robotica DIY este un lucru distractiv și ușor pe care îl puteți învăța în câteva minute dacă aveți un ghid adecvat. Vrei să înveți Robotica, dar nu știi de unde să începi? Atunci asta e pentru tine. Aici, vă vom ajuta să începeți cu robotica DIY cu instrucțiuni pas cu pas ușor de urmărit, 100% gratuite, începând de la elementele de bază ale Roboticii, părți ale robotului și apoi vom începe tutoriale complete pas cu pas. Aici veți găsi, de asemenea, o colecție minunată de tutoriale de proiecte de robotică de la nivel începător la avansat pentru a începe cu robotica DIY.
începeți să învățați Robotica
Partea 1 – telecomanda
așa cum am menționat mai devreme, acest robot DIY este un robot controlat de la distanță. Deci, în secțiunea controller, avem un panou de comandă, un joystick – pentru a controla mișcarea robotului și închiderea și deschiderea pumnului robotului, un accelerometru – pentru a mișca brațul robotic și un modul wireless pentru a transmite aceste date robotului.
conexiuni
pur și simplu conectați toate componentele așa cum se arată mai jos. Vom alimenta Arduino cu o bancă de alimentare de 5V și vom folosi Voutul de 5 V al arduino pentru a alimenta toate celelalte module.
telecomanda PCB
în videoclipul meu anterior, am arătat cum faceți această telecomandă fără fir pentru robotul dvs. Dacă nu ați văzut încă acest lucru, vă rugăm să consultați mai întâi videoclipul de mai jos. Pentru că vom folosi telecomanda pentru a controla acest robot.
practic ceea ce face această telecomandă este să citească date analogice și digitale de la senzori, cum ar fi butoanele accelerometrului joystick și să le stocheze în variabile separate. Aceste variabile vor fi combinate împreună pentru a forma un singur șir lung și acest șir va fi trimis robotului nostru folosind modulul wireless HC12.
desenarea schemelor și proiectarea PCB folosind Altium
așa că am folosit Altium Designer pentru a desena circuitul și a proiecta PCB-ul. Este un instrument puternic care poate fi folosit pentru a proiecta și crea propriile PCB-uri pentru proiectul dvs., precum și PCB-uri complexe și multiplayer pentru uz industrial. Iată linkul către versiunea de încercare Altium. Deci, asigurați-vă că verificați-l.
Circuit
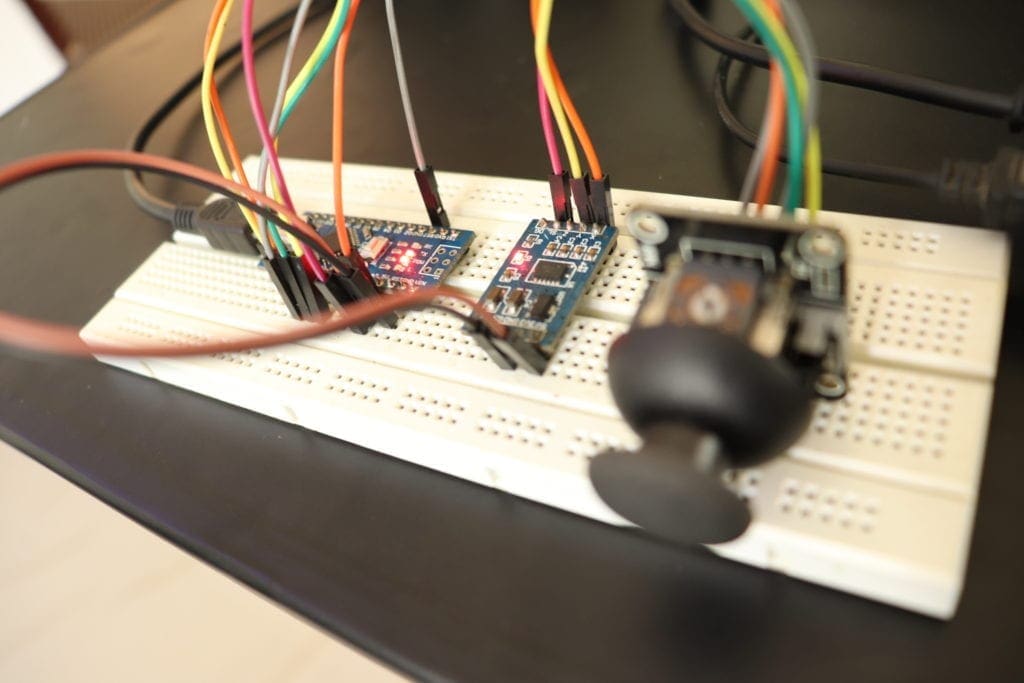
am realizat un circuit care a inclus toate componentele: joystick-ul, accelerometrul, modulul arduino nano și hc12 s-au conectat la pinul GPIO al arduino și l-au asamblat pe o placă de pâine.

a funcționat perfect, dar problema a fost că întreaga placă părea foarte dezordonată, cu toate firele de jumper care mergeau aici și acolo. Așa că am decis să merg cu PCB.
în versiunea PCB, am adăugat 4 comutatoare pe care le voi folosi pentru următorul proiect.
am adăugat și un regulator 7805 care mă va ajuta să furnizez o tensiune de intrare între 7V și 35V, astfel încât să pot folosi o sursă de alimentare USB de 5V, o baterie de 9V sau chiar o baterie Lipo de 12 V fără probleme. Am adăugat, de asemenea, unele LED-uri indicator care va lasa-ma sa stiu daca ceva oprit de lucru. Veți găsi circuitul în linkul de mai jos.
PCB Layout
Altium PCB Designer poate fi, de asemenea, utilizat pentru a face PCB layout. Acesta este aspectul pe care l-am făcut folosind circuitul. După cum puteți vedea, acesta este un PCB cu două straturi, ceea ce înseamnă că rutarea este acolo pe ambele părți-partea superioară, precum și partea de jos.

în partea stângă a plăcii am lăsat un spațiu gol pentru a-mi păstra bateriile acum am fișierul Gerber cu mine. Tot ce trebuia să fac era să comand PCB-ul.
odată ce am primit toate componentele, le-am lipit împreună și acesta este PCB-ul meu final. Vezi tu, toate componentele sunt conectate la bord acum.
int x;int y;int lr;int bf;int sw;void setup(){ Serial.begin(9600);pinMode(A0, INPUT);pinMode(A1, INPUT);pinMode(A2, INPUT);pinMode(A3, INPUT);pinMode(A4, INPUT);pinMode(2, OUTPUT);}void loop(){digitalWrite(A0,0);digitalWrite(2, HIGH);x = analogRead(A0);y = analogRead(A1);lr = analogRead(A2);bf = analogRead(A3);sw = analogRead(A4);Serial.print("Accelerometer");Serial.print("X = ");Serial.println(x);Serial.print("Y = ");Serial.println(y);Serial.println("");Serial.print("Joy Stick");Serial.println("");Serial.print("Left/Right = ");Serial.println(lr);Serial.print("Back/Forward = ");Serial.println(bf);Serial.print("Switch = ");Serial.println(sw);Serial.println("");Serial.println("");delay(250);}
odată ce acest cod este încărcat, porniți monitorul serial și verificați dacă toate aceste valori sunt afișate corect.
apoi puteți încărca codul real de mai jos.
Cod
pur și simplu descărcați codul de mai jos folosind linkul de descărcare de mai jos și încărcați-l pe controlerul dvs.
descărcați
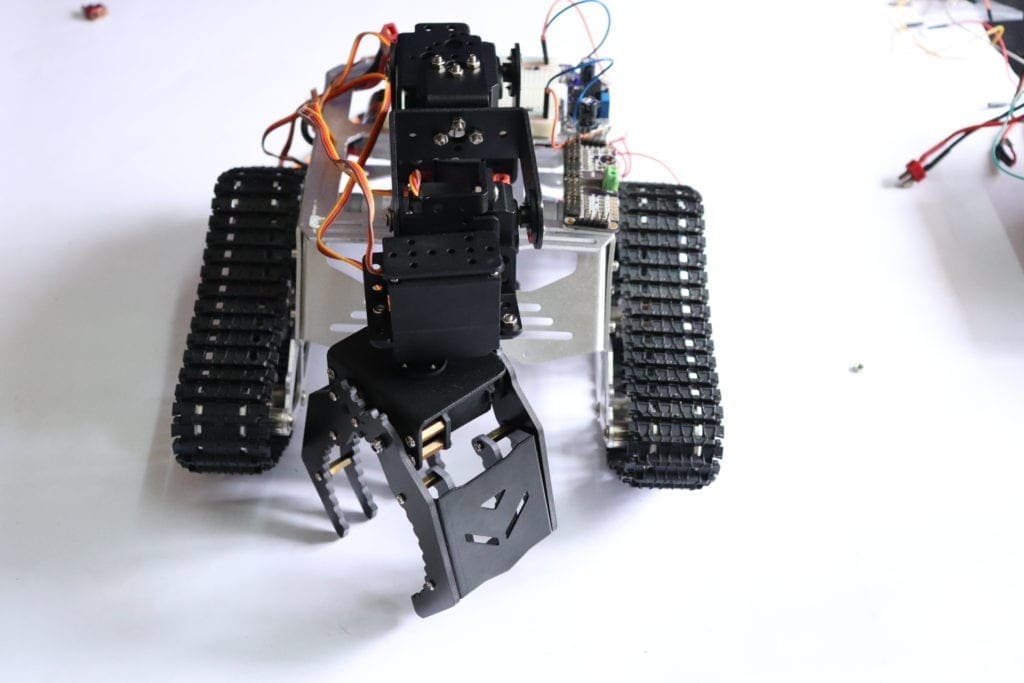
Partea 2-robotul
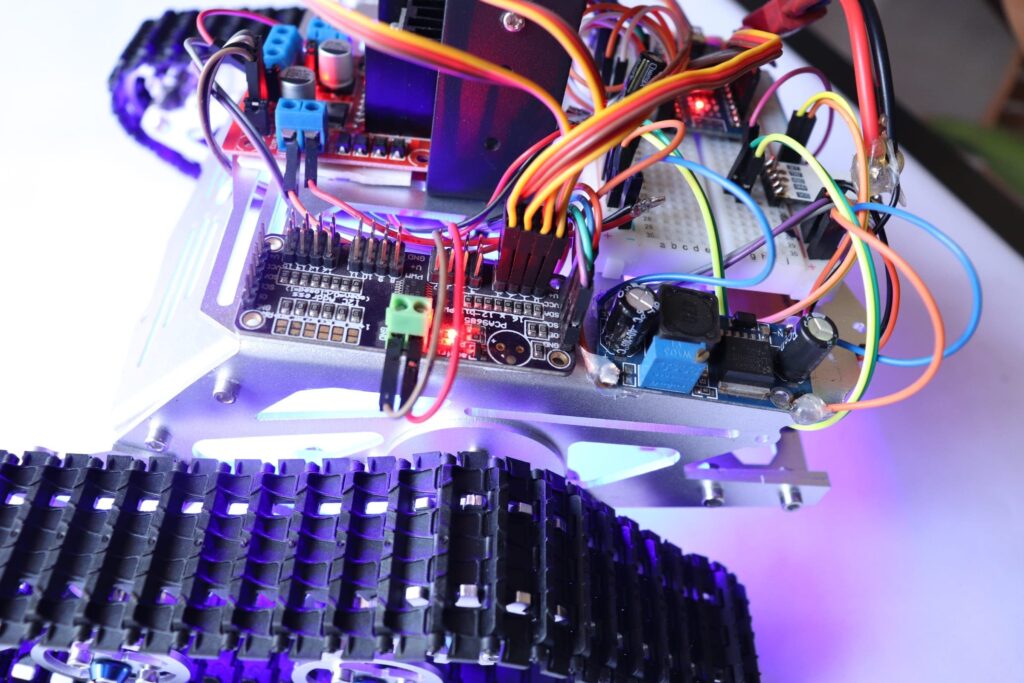
partea principală a robotului este șasiul în care montăm toate componentele, inclusiv brațul.
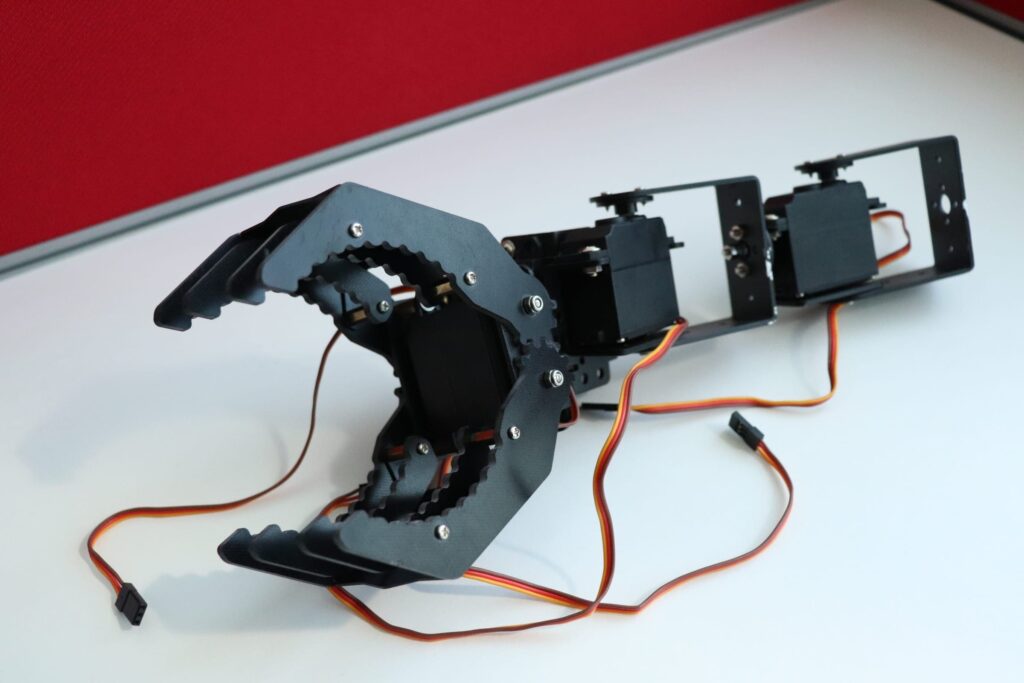
am luat trusa de braț robotic de la banggood.com. Acest braț robotizat este fabricat din aluminiu de bună calitate și are o greutate foarte ușoară. Acesta are atât de multe puncte de montare care ne vor permite să ne conectăm la orice corpuri/șasiu robot fără a găuri găuri de montare.
Faceți clic aici pentru a verifica
există 4 servomotoare care vor oferi brațului robotic un total de 3 grade de libertate. Servomotoarele sunt incluse și tensiunea de lucru este de 4,8-6v.
puteți cumpăra acest lucru împreună cu servomotorul sau le puteți cumpăra separat.
șasiul pe care l-am folosit pentru a face acest Robot pick and place este ceva despre care aș vrea să vorbesc. Am acest kit banggood.com. nu numai acesta, au atât de multe tipuri de cadre robot, motoare și aproape toți senzorii pentru realizarea Arduino, raspberry pi și alte proiecte electronice și hobby. Veți obține toate aceste lucruri la un preț ieftin, cu transport maritim foarte rapid și de calitate.
și mare lucru despre acest kit este ele oferă toate instrumentele de care aveți nevoie pentru a asambla cadru împreună.
ia kit-ul de Robot DIY de la BangGood
Click aici pentru a verifica-l!!
Servo motor de Control
PCA9685 este un 16 canal 12 biți PWM I2C-bus controlat Driver Servo motor. Șoferul se poate conecta foarte ușor la arduino, plăcintă cu zmeură și poate fi programat cu ușurință pentru a controla servomotoarele unice sau multiple și pentru a vă face propriul avion RC, mașină, navă, quadrapod, hexapod sau orice doriți.
urmați acest link pentru a afla mai multe despre driverul servomotorului.
alegeți și plasați conexiunile robotului
aici vom folosi o sursă de alimentare de 12 V pentru alimentarea întregului robot. Alimentăm voltul brut 12 la LED și tensiunea IC a șoferului motorului pentru motor.
apoi folosim un regulator pentru a coborî tensiunea la 5V și a-l alimenta la Arduino, HC12 și servomotor.
puteți conduce motoarele de curent continuu folosind un driver de motor bun IC. În acest proiect, voi folosi driverul Dual h Bridge motor IC-L293D care poate controla două servomotoare simultan.
pentru mai multe detalii despre conducerea motoarelor de curent continuu folosind L293D IC click aici. Dacă sunteți nou în acest sens, este mai bine să treceți prin acest lucru înainte de a trece la pasul următor pentru a înțelege mai bine proiectul.
pur și simplu conectați toate componentele așa cum se arată mai jos.
vom alimenta Arduino cu o bancă de alimentare de 5V și vom folosi Voutul de 5 V al arduino pentru a alimenta toate celelalte module.
Arduino – Servo motor Driver
- 5 Vout – VCC Arduino
- Gnd – Gnd
- SDA – SDA
- SCL – SCL
Arduino – HC12
- 5 Vout – VCC Arduino
- Gnd – Gnd
- 10 – TX
- 11 – Rx
Servo motor Driver – Servo Motor
- Servo 1 – Port 000
- Servo 2 – Port 001
- Servo 3 – Port 002
- Servo 4 – Port 003
Arduino – L293D
- Pin 2 – Motor 1 A
- Pin 3 – Motor 1 B
- Pin 4 – Motor 2 a
- Pin 5 – Motor 2 B
L293D
Podul H va funcționa numai dacă pinul de activare este setat la logica 1
un lucru de reținut în timp ce utilizați acest IC este că există doi pini în care trebuie să furnizăm puterea de intrare. Pinul 8 și pinul 16; ambele sunt pentru scopuri complet diferite. Pinul 9 este pentru acționarea motorului care poate gestiona o tensiune de 6 V până la 30 volți și pinul 16 care va alimenta IC pentru circuitul intern. În niciun caz, nu trebuie să schimbați acești doi pini sau poate arde cipul.
Cod
pur și simplu descărcați codul de mai jos folosind link-ul de descărcare de mai jos și încărcați-l la tine DIY robot și va fi bine să plec.

descărcați
să mergem!!!
odată ce codul este încărcat în robotul dvs. de alegere și plasare, vă puteți conecta robotul la o sursă de alimentare de 12 V și controlerul wireless al robotului la o sursă de alimentare de 5V.
acum ar trebui să puteți controla robotul de la distanță folosind controlerul wireless.
acesta este doar un început. Noi, Grupul RootSaid, lucrăm la o mănușă de control fără fir care poate fi utilizată pentru a controla întregul robot, inclusiv brațul robotic. Dar este ceva mișto la mănușa asta.
această mănușă poate detecta gesturile mâinilor fără senzor Flex. Da, ai auzit bine. Vrei să afli mai multe? Fii o parte din RootSaid.
Abonați-vă site-ul RootSaid introducând pur și simplu ID-ul dvs. de e-mail de mai jos. Veți primi notificări ori de câte ori tutorialul este disponibil pentru a vă juca.