para realizar alta eficiência, grande capacidade de gerenciamento e economia de energia em aplicações relacionadas a motores de indução industrial, é necessário adotar sistemas de conversor de frequência controláveis. O sistema do conversor de frequência hoje em dia é motor de C. A. alimentado por um conversor de frequência estático. O Conversor de frequência atualizado funciona muito bem para aplicações de motores CA e fácil instalação. Uma questão importante, no entanto, é causada pela tensão de saída não sinusoidal. Este fator causou muitos problemas indesejáveis. O aumento das perdas do motor de indução, ruído e vibrações, impacto prejudicial no sistema de isolamento por indução e falha do rolamento são exemplos de problemas dos sistemas relacionados ao conversor de frequência. Perdas de indução aumentadas significam uma desclassificação da potência de saída de indução para evitar superaquecimento. A medição no laboratório mostra que os aumentos de temperatura podem ser 40% maiores com o Conversor de frequência em comparação com as fontes de alimentação gerais. A pesquisa contínua e o aprimoramento dos conversores de frequência resolveram muitos desses problemas. Infelizmente, parece que resolver um problema acentuou outro. Reduzir as perdas do conversor de indução e frequência tende a aumentar o impacto prejudicial no isolamento. Os fabricantes de indução estão, É claro, cientes disso. Novos projetos de indução (motores resistentes a inversores) estão começando a aparecer no mercado. Melhor isolamento de enrolamento do estator e outras melhorias estruturais garantem motores de indução que serão melhor adaptados para aplicações de conversor de frequência.
introdução
um dos problemas mais graves para o motor de indução tem sido a dificuldade de adaptá-lo ao ajuste de velocidade. A velocidade síncrona de um motor CA é determinada pela seguinte equação.
ns = 120 * f / p
ns = velocidade síncrona
f = rede de energia de frequência
p = pólo número
A única maneira de ajustar a velocidade, para um determinado pólo de número para alterar a frequência.
o princípio básico
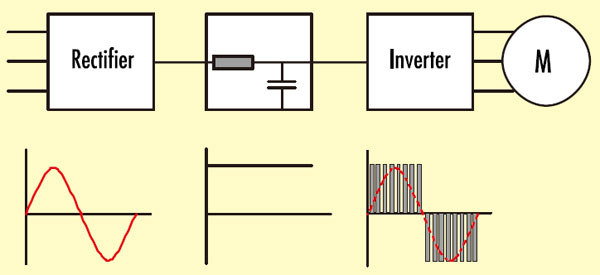
em teoria, a ideia básica é simples, o processo de transformar a frequência da linha de energia estável em uma frequência variável é basicamente feito em duas etapas:
- a fonte de alimentação CA é retificada em uma tensão CC.
- a tensão CC é cortada em uma tensão CA da frequência desejada.
um conversor de frequência consiste basicamente em três blocos: o retificador, o DC-link e o inversor.
diferentes tipos de conversores de frequência
Inversor de fonte de tensão PWM (VSI)
o PWM (modulação de largura de pulso) é amplamente aplicado na indústria de conversores de frequência. Eles estão disponíveis de várias centenas de watts até megawatts.
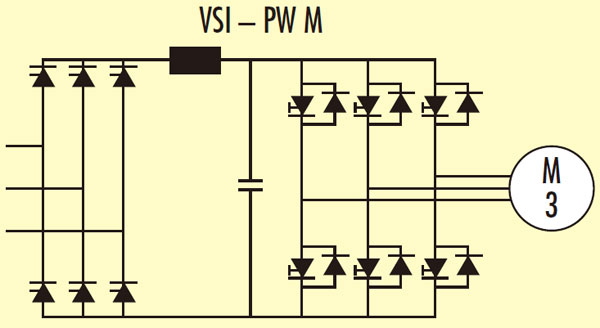
um conversor PWM não precisa corresponder exatamente à carga, ele só precisa se certificar de que a carga não consome corrente maior do que o Conversor PWM é avaliado para. É bem possível executar uma indução de 20 kW com um conversor PWM de 100 kW. Este é um grande benefício que torna a operação mais fácil para o aplicativo.
hoje em dia, o Conversor de frequência PWM está usando o Insulated Gate Bipolar Translator (IGBT). Os conversores de frequência PWM modernos têm um desempenho muito bom e não estão muito atrás dos projetos que usam uma fonte de alimentação sinusoidal – pelo menos não na faixa de potência de até 100 kW ou mais.
Inversor de fonte de corrente(CSI)
o inversor de fonte de corrente é um design áspero e bastante simples em comparação com o PWM. Ele usa tiristores simples ou SCRs nos circuitos de energia, o que o torna muito mais barato. Também tem o benefício de ser muito confiável. O projeto faz com que seja à prova de curto-circuito por causa dos grandes indutores no link DC. É mais volumoso que o PWM.
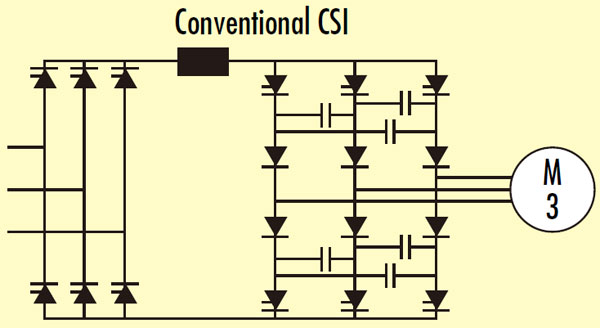
anteriormente, o inversor de fonte de corrente era a melhor escolha para grandes cargas. Uma desvantagem com o inversor de fonte de corrente é a necessidade de combinar com a carga. O Conversor de frequência deve ser projetado para o motor de indução usado. Na verdade, a indução em si é uma parte do circuito invertido.
o inversor de fonte de corrente fornece ao motor de indução uma corrente quadrada. Em baixas velocidades, a indução produz um torque de cogging. Este tipo de conversor de frequência gerará mais ruído na fonte de alimentação em comparação com o Conversor PWM. A filtragem é necessária.
transientes de tensão pesada na tensão de saída são uma desvantagem adicional do inversor de fonte de corrente. Os transientes podem atingir quase o dobro da tensão nominal nos piores casos. Há também o risco de que o isolamento do enrolamento seja desgastado prematuramente, se este conversor de Frequência for usado. Este efeito é mais grave quando a carga não corresponde corretamente ao conversor de frequência. Isso pode acontecer ao executar em carga parcial. Este tipo de conversor de frequência está perdendo sua popularidade cada vez mais.
Flux Vector Control(FVC)
um flux vector control é um tipo mais sofisticado de conversor de frequência que é usado em aplicações com demandas extremas de controle. Em fábricas de papel, por exemplo, é necessário controlar a velocidade e as forças de alongamento com muita precisão.
um conversor de frequência FVC sempre tem algum tipo de loop de feedback. Este tipo do conversor de frequência é geralmente do interesse menor em aplicações da bomba. É caro e seus benefícios não podem ser aproveitados.
efeito no motor
uma indução funciona melhor quando fornecida com uma fonte de tensão sinusoidal pura. Este é principalmente o caso quando conectado a uma fonte de energia robusta.
quando uma indução é conectada a um conversor de frequência, ela será fornecida com uma tensão não sinusoidal-mais como uma tensão quadrada cortada. Se fornecermos uma indução trifásica com uma tensão quadrada simétrica de 3 fases, todos os harmônicos que são múltiplos de três, bem como os números pares, serão eliminados por causa da simetria. Mas, ainda restam os números 5;7 e 11;13 e 17;19 e 23; 25 e assim por diante. Para cada par de harmônicos, o número mais baixo é a rotação reversa e o número mais alto é a rotação para a frente.
a velocidade do motor de indução é determinada pelo número fundamental, ou número 1, devido à sua forte dominância. Agora, o que acontece com os harmônicos?
do ponto de vista dos harmônicos, a indução parece ter o rotor bloqueado, o que significa que o deslizamento é de aproximadamente 1 para os harmônicos. Estes não fornecem trabalho útil. O resultado é principalmente perdas de rotor e aquecimento extra. Em nossa aplicação em particular, este é um resultado sério. Com a tecnologia moderna, no entanto, é possível eliminar grande parte do conteúdo harmônico na corrente de indução, reduzindo assim as perdas extras.
conversor de frequência antes
os primeiros conversores de frequência costumavam usar uma tensão quadrada simples para fornecer o motor de indução. Eles causaram problemas de aquecimento e as induções funcionaram com um ruído típico causado pela ondulação do torque. Um desempenho muito melhor foi alcançado simplesmente eliminando o quinto e o sétimo. Isso foi feito através de alguma comutação extra do sinal de tensão.
Conversor de frequência hoje
hoje em dia, a técnica é mais sofisticada e a maioria das desvantagens são a história. O desenvolvimento de semicondutores de potência rápida e o microprocessador tornou possível adaptar o padrão de comutação de tal forma que a maioria dos harmônicos nocivos seja eliminada.
estão disponíveis frequências de comutação de até 20 kHz para conversores de frequência na faixa de média potência (até algumas dezenas de kW). A corrente de indução com este tipo de conversor de frequência será quase em forma de seio.
em uma alta frequência de comutação, as perdas de indução são mantidas baixas, mas as perdas no conversor de frequência aumentarão. As perdas totais se tornarão maiores em frequências de comutação excessivamente altas.
Alguns motor de teoria básica
A produção de torque em um motor de indução pode ser expresso como
T = V * τ * B
V = Ativo rotor volume
τ = Corrente por metro estator diâmetro da circunferência
B = densidade de Fluxo no entreferro
B = proporcional a E / ω) = E / (2 * π * f)
ω = frequência angular da tensão do estator
E = induzida tensão do estator
Para obter o melhor desempenho em várias velocidades, torna-se necessário manter um adequado nível de magnetização pela indução para cada velocidade.
uma gama de várias características de torque é mostrada como figura a seguir. Para a carga de torque constante, a relação V/F deve ser constante. Para a carga quadrada do torque, uma relação constante de V/F conduzirá à magnetização excessivamente alta em uma mais baixa velocidade. Isso gerará perdas de ferro desnecessariamente altas e Perdas de resistência (I2R).
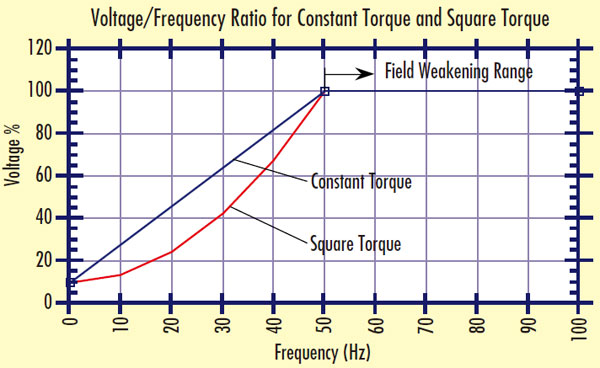
é melhor usar uma relação quadrada V / F. As perdas de ferro e as perdas de I2R são, portanto, reduzidas a um nível mais aceitável para o torque de carga real.
se olharmos para a figura, descobrimos que a tensão atingiu seu máximo e não pode ser aumentada acima da frequência base de 50 hz. O intervalo acima da frequência base é chamado de intervalo de enfraquecimento do campo. Uma conseqüência disso é que não é mais possível manter o torque necessário sem aumentar a corrente. Isso resultará em problemas de aquecimento do mesmo tipo que com tensões normais sob uma rede de energia sinusoidal. A corrente nominal do conversor de frequência provavelmente será excedida.
correndo na faixa de enfraquecimento de campo
às vezes, há uma tentação de executar a bomba em frequências acima da frequência da rede elétrica comercial, a fim de alcançar um ponto de serviço que, de outra forma, seria impossível. Fazer isso exige uma conscientização extra. A potência do eixo para uma bomba aumentará com o cubo de velocidade. Uma velocidade excessiva de 10% exigirá 33% mais potência de saída. Grosso modo, podemos esperar que o aumento da temperatura aumente em cerca de 75%.

existe, no entanto, um limite para o que podemos extrair da indução em excesso de velocidade. O torque máximo da indução cairá em função de 1 / F na faixa de enfraquecimento do campo.
é óbvio que a indução cairá se o Conversor de frequência não puder suportá-lo com uma tensão que corresponda à necessária pelo torque.
Derating
em muitos casos, a indução é executada na capacidade máxima de uma rede elétrica sinusoidal e qualquer aquecimento extra não pode ser tolerado. Se tal indução for alimentada por um conversor de frequência de algum tipo, provavelmente deve ser executada com menor potência de saída para evitar superaquecimento.
não é incomum que um conversor de frequência para bombas grandes acima de 300 kW adicione perdas extras de indução de 25-30%. Na faixa de potência superior, apenas alguns dos conversores de frequência têm uma alta frequência de comutação: 500 a 1000 Hz é usual para a antiga geração de conversores de frequência.
para compensar as perdas extras, é necessário reduzir a potência de saída. Nós recomendamos um derating geral de 10-15% para grandes bombas.
como o Conversor de frequência polui a rede de abastecimento com harmônicos, um filtro de entrada às vezes é prescrito pela empresa de energia. Este filtro diminuirá a tensão disponível tipicamente por 5-10%. A indução será, consequentemente, executado em 90-95% da tensão nominal. A conseqüência é aquecimento adicional. Desarrumar pode ser necessário.
exemplo
suponha que a potência de saída para o motor da bomba real seja de 300 kW a 50 Hz e o aumento da temperatura seja de 80°C usando uma rede elétrica sinusoidal. Perdas extras de 30% resultarão em uma indução 30% mais quente. Uma suposição conservadora é que o aumento da temperatura varia com o quadrado da potência do eixo.
para não exceder 80°C, temos que reduzir a potência do eixo para
Preduced = √(1/1.3) * 300 = 263kw
a redução pode ser conseguida reduzindo o diâmetro do impulsor ou acelerando para baixo.
perdas do conversor de Frequência
quando a eficiência total de um sistema de conversor de frequência é determinada, as perdas internas dos conversores de frequência devem ser incluídas. Essas perdas de conversor de frequência não são constantes e não são fáceis de determinar. Eles consistem em uma parte constante e uma parte dependente da carga.
perdas constantes:
perdas de resfriamento—Ventilador de refrigeração) – perdas nos circuitos eletrônicos e assim por diante.
perdas dependentes de carga:
perdas de comutação e Perdas de chumbo nos semicondutores de potência.
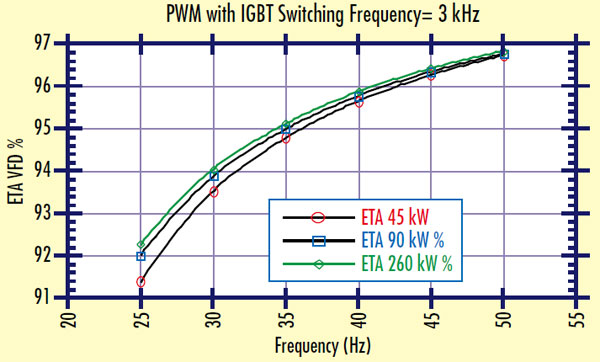
a figura a seguir mostra a eficiência do conversor de frequência em função da frequência em uma carga cúbica para unidades avaliadas em 45, 90 e 260 kW. As curvas são representativas para conversores de frequência na faixa de potência de 50-300 kW; com a frequência de comutação igualando cerca de 3 kHz e com um IGBT da segunda geração.
efeitos no isolamento do motor
as tensões de saída dos conversores de frequência modernos têm um tempo de aumento de tensão muito curto.
dU/dT = 5000V / µs é um valor comum.
tais inclinações de tensão íngremes causarão estresse indevido nos materiais de isolamento do enrolamento de indução. Com tempos de subida curtos, a tensão no enrolamento do estator não é distribuída uniformemente. Com uma fonte de alimentação sinusoidal, a tensão de giro em um enrolamento de indução é normalmente distribuída igualmente. Com um conversor de frequência, por outro lado, até 80% da tensão cairá no primeiro e no segundo turno. Como o isolamento entre os fios constitui um ponto fraco, isso pode ser perigoso para a indução. Um curto tempo de subida também causa reflexão de tensão no cabo de indução. No pior dos casos, esse fenômeno dobrará a tensão nos terminais de indução. Uma indução alimentada a partir de um conversor de frequência de 690 volts pode ser exposta a até 1 900 volts entre as fases.
a amplitude da tensão depende do comprimento do cabo de indução e do tempo de subida. Com tempos de subida muito curtos, a reflexão completa ocorre em um cabo de 10 a 20 metros de comprimento.
para garantir a função e o amplo tempo de vida útil do motor, é absolutamente necessário que um enrolamento seja adaptado para uso com um conversor de frequência. As induções para tensões acima de 500 volts devem ter alguma forma de isolamento reforçado. O enrolamento do estator deve ser impregnado com uma resina que garanta um isolamento livre de bolhas ou cavidades. As descargas de brilho geralmente começam em torno das cavidades. Este fenômeno acabará por destruir o isolamento.
existem maneiras de proteger um motor. Além de um sistema de isolamento reforçado, pode ser necessário inserir um filtro entre o Conversor de frequência e a indução. Esses filtros estão disponíveis na maioria dos fornecedores de conversor de frequência conhecidos.
um filtro normalmente desacelerará o tempo de aumento de tensão de
dU/dT = 5000V/µs para 500-600V/µs
falha do rolamento
a quebra de máquinas rotativas geralmente pode estar relacionada à falha do rolamento. Além do aquecimento excessivo, lubrificação insuficiente ou fadiga do metal, a corrente elétrica através dos rolamentos pode ser a causa por trás de muitas falhas misteriosas do rolamento, especialmente com grandes induções. Esse fenômeno é geralmente causado pela Não simetria no circuito magnético, que induz uma pequena tensão na estrutura do estator ou por uma corrente de sequência zero. Se o potencial entre a estrutura do estator e a unidade do eixo se tornar alto o suficiente, uma descarga ocorrerá através do rolamento. Pequenas descargas elétricas entre os elementos rolantes e a pista de rolamento acabarão danificando o rolamento.
o uso de conversores de frequência aumentará a probabilidade de ocorrência desse tipo de falha no rolamento. A técnica de comutação de um conversor de frequência moderno causa uma corrente de sequência zero que, sob certas circunstâncias, encontra seu caminho através dos rolamentos.
a maneira mais fácil de curar esse problema é levantar um obstáculo para a corrente. O método usual é usar um rolamento com um revestimento isolante no anel externo.
conclusões
o uso de um conversor de frequência não significa que não haja problemas. Muitas perguntas que devem ser prestadas atenção durante o trabalho de design. Será necessário, por exemplo, limitar a potência do eixo disponível para evitar aquecimento excessivo? Pode ser necessário executar com menor potência de saída para evitar esse problema.
o isolamento do motor de indução resistirá aos efeitos do inversor? A filtragem é necessária? Inversores modernos e eficientes têm impacto prejudicial no isolamento devido à alta frequência de comutação e curto tempo de aumento de tensão.
Qual comprimento máximo do cabo pode ser usado sem produzir reflexão de tensão total? A amplitude da tensão depende do comprimento do cabo e do tempo de subida. Com tempos de subida muito curtos, a reflexão total ocorrerá em cabos de 10 a 20 metros de comprimento.
pode ser necessário usar rolamentos isolados para evitar que uma corrente de sequência zero encontre o caminho para os rolamentos?
somente quando eliminarmos todas essas questões, poderemos tomar decisões corretas sobre o uso de um conversor de frequência.