Para lograr una alta eficiencia, una gran manejabilidad y un ahorro de energía en aplicaciones relacionadas con motores de inducción industriales, es necesario adoptar sistemas de convertidor de frecuencia controlables. El sistema convertidor de frecuencia hoy en día es un motor de CA alimentado por un convertidor de frecuencia estático. El convertidor de frecuencia actualizado funciona muy bien para aplicaciones de motor de CA y fácil instalación. Un problema importante, sin embargo, es causado por el voltaje de salida no sinusoidal. Este factor ha causado muchos problemas indeseables. El aumento de las pérdidas del motor de inducción, el ruido y las vibraciones, el impacto perjudicial en el sistema de aislamiento de inducción y las fallas de los rodamientos son ejemplos de problemas de los sistemas relacionados con el convertidor de frecuencia. El aumento de las pérdidas de inducción significa una reducción de la potencia de salida de inducción para evitar el sobrecalentamiento. La medición en el laboratorio muestra que los aumentos de temperatura pueden ser un 40% más altos con el convertidor de frecuencia en comparación con las fuentes de alimentación generales. La investigación continua y la mejora de los convertidores de frecuencia han resuelto muchos de estos problemas. Desafortunadamente, parece que resolver un problema ha acentuado otro. La reducción de las pérdidas del convertidor de inducción y frecuencia tiende a aumentar el impacto perjudicial en el aislamiento. Los fabricantes de inducción son, por supuesto, conscientes de esto. Comienzan a aparecer en el mercado nuevos diseños de inducción (motores resistentes al inversor). Un mejor aislamiento del devanado del estator y otras mejoras estructurales garantizan que los motores de inducción se adapten mejor a las aplicaciones de convertidor de frecuencia.
Introducción
Uno de los problemas más graves del motor de inducción ha sido la dificultad de adaptarlo al ajuste de velocidad. La velocidad síncrona de un motor de CA se determina mediante la siguiente ecuación.
ns = 120 * f / p
ns = velocidad síncrona
f = frecuencia de red eléctrica
p = número de polo
La única forma de ajustar la velocidad, para un número de polo dado, es cambiar la frecuencia.
El principio básico
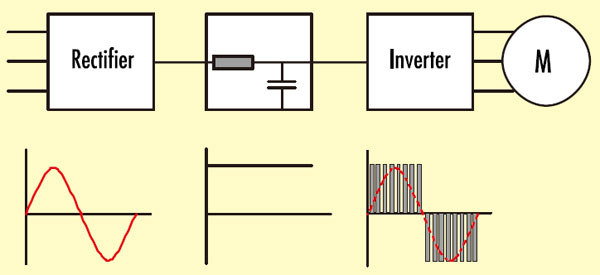
En teoría, la idea básica es simple, el proceso de transformar la frecuencia estable de la línea de alimentación en una frecuencia variable se realiza básicamente en dos pasos:
- La fuente de alimentación de CA se rectifica en una tensión de CC.
- La tensión de CC se divide en una tensión de CA de la frecuencia deseada.
Un convertidor de frecuencia consiste básicamente en tres bloques: el rectificador, el enlace de CC y el inversor.
Diferentes tipos de convertidores de frecuencia
Inversor de fuente de voltaje PWM (VSI)
El PWM (Modulación de ancho de pulso) se aplica ampliamente en la industria del convertidor de frecuencia. Están disponibles desde varios cientos de vatios hasta megavatios.
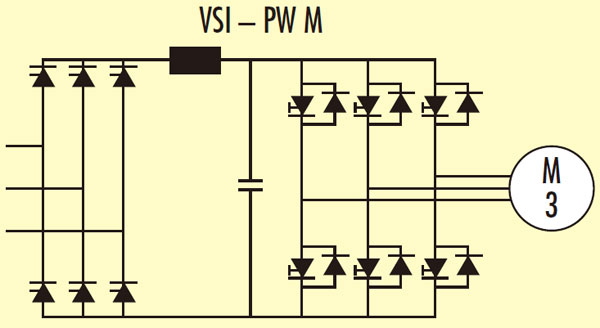
Un convertidor PWM no tiene que coincidir exactamente con la carga, solo necesita asegurarse de que la carga no consuma corriente superior a la nominal del convertidor PWM. Es muy posible ejecutar una inducción de 20 kW con un convertidor PWM de 100 kW. Este es un gran beneficio que facilita la operación de la aplicación.
Hoy en día, el convertidor de frecuencia PWM utiliza un Traductor Bipolar de Puerta Aislada (IGBT). Los convertidores de frecuencia PWM modernos funcionan muy bien y no están muy por detrás de los diseños que utilizan una fuente de alimentación sinusoidal, al menos no en el rango de potencia de hasta 100 kW aproximadamente.
Inversor de fuente de corriente (CSI)
El inversor de fuente de corriente es un diseño aproximado y bastante simple en comparación con el PWM. Utiliza tiristores simples o SCRs en los circuitos de alimentación, lo que lo hace mucho más barato. También tiene la ventaja de ser muy confiable. El diseño lo hace a prueba de cortocircuitos debido a los grandes inductores en el enlace de CC. Es más voluminoso que el PWM.
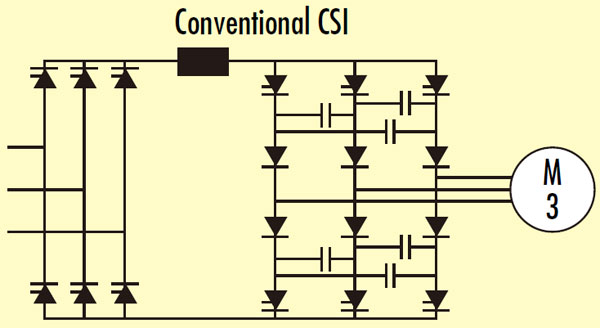
Anteriormente, el inversor de fuente de corriente era la mejor opción para cargas grandes. Una desventaja con el inversor de fuente de corriente es la necesidad de adaptarse a la carga. El convertidor de frecuencia debe diseñarse para el motor de inducción utilizado. De hecho, la inducción en sí es una parte del circuito invertido.
El inversor de fuente de corriente suministra al motor de inducción una corriente de forma cuadrada. A bajas velocidades, la inducción produce un par de enganche. Este tipo de convertidor de frecuencia generará más ruido en la fuente de alimentación en comparación con el convertidor PWM. Es necesario filtrar.
Los transitorios de voltaje pesado en la tensión de salida son una desventaja adicional del inversor de fuente de corriente. Los transitorios pueden alcanzar casi el doble de la tensión nominal en el peor de los casos. También existe el riesgo de que el aislamiento del devanado se desgaste prematuramente, si se utiliza este convertidor de frecuencia. Este efecto es más grave cuando la carga no coincide correctamente con el convertidor de frecuencia. Esto puede suceder cuando se ejecuta con carga parcial. Este tipo de convertidor de frecuencia está perdiendo su popularidad cada vez más.
Control vectorial de flujo (FVC)
Un control vectorial de flujo es un tipo de convertidor de frecuencia más sofisticado que se utiliza en aplicaciones con demandas de control extremas. En las fábricas de papel, por ejemplo, es necesario controlar la velocidad y las fuerzas de estiramiento con mucha precisión.
Un convertidor de frecuencia FVC siempre tiene algún tipo de bucle de retroalimentación. Este tipo de convertidor de frecuencia es generalmente de menor interés en aplicaciones de bombas. Es caro y sus beneficios no se pueden aprovechar.
Efecto en el motor
Una inducción funciona mejor cuando se suministra con una fuente de tensión sinusoidal pura. Este es principalmente el caso cuando se conecta a una fuente de energía eléctrica robusta.
Cuando se conecta una inducción a un convertidor de frecuencia, se suministra con un voltaje no sinusoidal, más como un voltaje cuadrado picado. Si suministramos una inducción de 3 fases con un voltaje cuadrado simétrico de 3 fases, todos los armónicos que son múltiplos de tres, así como los números pares, se eliminarán debido a la simetría. Pero, aún quedan los números 5; 7 y 11;13 y 17;19 y 23; 25 y así sucesivamente. Para cada par de armónicos, el número más bajo es de rotación inversa y el número más alto es de rotación hacia adelante.
La velocidad del motor de inducción está determinada por el número fundamental, o número 1, debido a su fuerte dominancia. ¿Qué pasa con los armónicos?
Desde el punto de vista de los armónicos, la inducción parece tener el rotor bloqueado, lo que significa que el deslizamiento es aproximadamente 1 para los armónicos. Estos no proporcionan ningún trabajo útil. El resultado es principalmente pérdidas de rotor y calentamiento adicional. En nuestra solicitud en particular, este es un resultado serio. Con la tecnología moderna, sin embargo, es posible eliminar gran parte del contenido de armónicos en la corriente de inducción, reduciendo así las pérdidas adicionales.
Convertidor de frecuencia antes de
Los primeros convertidores de frecuencia a menudo usaban un voltaje cuadrado simple para alimentar el motor de inducción. Causaron problemas de calentamiento y las inducciones funcionaron con un ruido típico causado por la ondulación del par. Se logró un rendimiento mucho mejor simplemente eliminando el quinto y el séptimo. Eso se hizo a través de una conmutación adicional de la señal de voltaje.
Convertidor de frecuencia hoy en día
Hoy en día, la técnica es más sofisticada y la mayoría de las desventajas son históricas. El desarrollo de semiconductores de potencia rápida y el microprocesador ha hecho posible adaptar el patrón de conmutación de tal manera que se eliminan la mayoría de los armónicos dañinos.
Las frecuencias de conmutación de hasta 20 kHz están disponibles para convertidores de frecuencia en el rango de potencia media (hasta algunas decenas de kW). La corriente de inducción con este tipo de convertidor de frecuencia tendrá forma casi sinusal.
A una frecuencia de conmutación alta, las pérdidas por inducción se mantienen bajas, pero las pérdidas en el convertidor de frecuencia aumentarán. Las pérdidas totales aumentarán a frecuencias de conmutación excesivamente altas.
Teoría básica de algún motor
La producción de par en un motor de inducción puede expresarse como
T = V * τ * B
V = Volumen activo del rotor
τ = Circunferencia del diámetro interior del estator de corriente por metro
B = Densidad de flujo en el espacio de aire
B = proporcional a (E / ω) = E / (2 * π * f)
ω = frecuencia angular de la tensión del estator
E = tensión inducida del estator
Para obtener el mejor rendimiento a varias velocidades, se hace necesario mantener un nivel de magnetización adecuado para la inducción para cada velocidad.
En la figura siguiente se muestra una gama de diversas características de par. Para la carga de par constante, la relación V/F debe ser constante. Para la carga de par cuadrado, una relación V/F constante dará lugar a una magnetización excesivamente alta a una velocidad más baja. Esto generará pérdidas de hierro y de resistencia (I2R) innecesariamente altas.
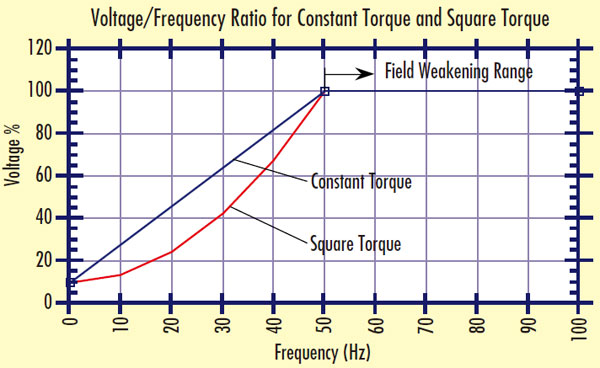
Es mejor usar una relación V/F cuadrada. Las pérdidas de hierro y las pérdidas I2R se reducen así a un nivel más aceptable para el par de carga real.
Si miramos la figura, encontramos que el voltaje ha alcanzado su máximo y no se puede aumentar por encima de la frecuencia base de 50 Hz. El rango por encima de la frecuencia base se denomina rango de debilitamiento de campo. Una consecuencia de esto es que ya no es posible mantener el par necesario, sin aumentar la corriente. Esto dará lugar a problemas de calentamiento del mismo tipo que con tensiones inferiores normales que se ejecutan desde una red eléctrica sinusoidal. La corriente nominal del convertidor de frecuencia probablemente se excederá.
Funcionando en el campo-rango de debilitamiento
A veces, existe la tentación de hacer funcionar la bomba a frecuencias por encima de la frecuencia de la red eléctrica comercial para alcanzar un punto de servicio que de otro modo sería imposible. Hacerlo requiere una mayor conciencia. La potencia del eje de una bomba aumentará con el cubo de velocidad. Un exceso de velocidad del 10% requerirá un 33% más de potencia de salida. En términos generales, podemos esperar que el aumento de temperatura aumente en aproximadamente un 75%.

No obstante, hay un límite a lo que podemos exprimir de la inducción a una velocidad excesiva. El par máximo de la inducción caerá en función de 1/F en el rango de debilitamiento del campo.
Es obvio que la inducción se caerá si el convertidor de frecuencia no puede soportarla con una tensión que corresponda a la que necesita el par.
Reducción de capacidad
En muchos casos, la inducción se ejecuta a su capacidad máxima desde una red eléctrica sinusoidal y no se puede tolerar ningún calentamiento adicional. Si tal inducción se alimenta de un convertidor de frecuencia de algún tipo, lo más probable es que se ejecute a una potencia de salida más baja para evitar el sobrecalentamiento.
No es inusual que un convertidor de frecuencia para bombas grandes de más de 300 kW agregue pérdidas de inducción adicionales de 25-30%. En el rango de potencia superior, solo unos pocos convertidores de frecuencia tienen una alta frecuencia de conmutación: 500 a 1000 Hz es habitual para la generación anterior de convertidores de frecuencia.
para compensar las pérdidas adicionales, es necesario reducir la potencia de salida. Recomendamos una reducción general del 10-15% para bombas grandes.
Dado que el convertidor de frecuencia contamina la red de suministro con armónicos, la compañía eléctrica a veces prescribe un filtro de entrada. Este filtro disminuirá el voltaje disponible en un 5-10%. En consecuencia, la inducción funcionará al 90-95% de la tensión nominal. La consecuencia es un calentamiento adicional. Reducir la capacidad puede ser necesario.
Ejemplo
Supongamos que la potencia de salida para el motor de la bomba real es de 300 kW a 50 Hz y el aumento de temperatura es de 80°C utilizando una red eléctrica sinusoidal. Las pérdidas adicionales del 30% darán lugar a una inducción que es un 30% más cálida. Una suposición conservadora es que el aumento de temperatura varía con el cuadrado de potencia del eje.
Para no exceder los 80 ° C, tenemos que reducir la potencia del eje a
Preduced = √(1/1.3) * 300 = 263 kW
La reducción se puede lograr reduciendo el diámetro del impulsor o acelerando.
Pérdidas del convertidor de frecuencia
Cuando se determine la eficiencia total de un sistema convertidor de frecuencia, deberán incluirse las pérdidas internas de los convertidores de frecuencia. Estas pérdidas del convertidor de frecuencia no son constantes y no son fáciles de determinar. Consisten en una parte constante y una parte dependiente de la carga.
Pérdidas constantes:
Pérdidas de refrigeración (ventilador de refrigeración): pérdidas en los circuitos electrónicos, etc.
Pérdidas dependientes de la carga:
Pérdidas de conmutación y pérdidas de plomo en los semiconductores de potencia.
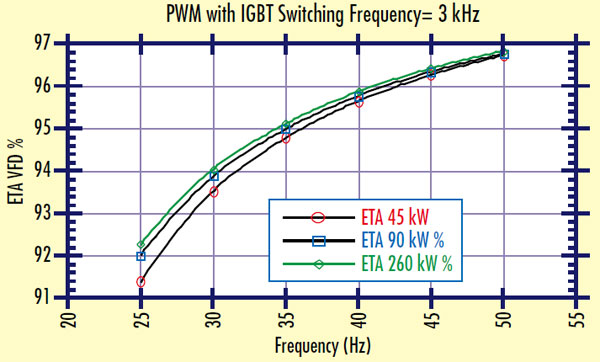
La siguiente figura muestra la eficiencia del convertidor de frecuencia en función de la frecuencia a una carga cúbica para unidades clasificadas en 45, 90 y 260 kW. Las curvas son representativas para convertidores de frecuencia en el rango de potencia de 50-300 kW; con una frecuencia de conmutación igual a aproximadamente 3 kHz y con un IGBT de segunda generación.
Efectos en el aislamiento del motor
Las tensiones de salida de los convertidores de frecuencia modernos tienen un tiempo de subida de tensión muy corto.
dU / dT = 5000V / µs es un valor común.
Tales pendientes de voltaje pronunciadas causarán un estrés indebido en los materiales de aislamiento del devanado de inducción. Con tiempos de subida cortos, el voltaje en el devanado del estator no se distribuye de manera uniforme. Con una fuente de alimentación sinusoidal, la tensión de giro en un devanado de inducción normalmente se distribuye por igual. Con un convertidor de frecuencia, por otro lado, hasta el 80% del voltaje caerá en la primera y la segunda vuelta. Dado que el aislamiento entre los cables constituye un punto débil, esto puede resultar peligroso para la inducción. Un tiempo de subida corto también provoca reflexión de voltaje en el cable de inducción. En el peor de los casos, este fenómeno duplicará el voltaje a través de los terminales de inducción. Una inducción alimentada desde un convertidor de frecuencia de 690 voltios puede estar expuesta a hasta 1 900 voltios entre fases.
La amplitud de voltaje depende de la longitud del cable de inducción y el tiempo de subida. Con tiempos de elevación muy cortos, la reflexión completa se produce en un cable de 10 a 20 metros de longitud.
Para garantizar el funcionamiento y una amplia vida útil del motor, es absolutamente necesario adaptar un devanado para su uso con un convertidor de frecuencia. Las inducciones para voltajes superiores a 500 voltios deben tener algún tipo de aislamiento reforzado. El devanado del estator debe estar impregnado con una resina que garantice un aislamiento libre de burbujas o cavidades. Las descargas luminosas a menudo comienzan alrededor de las caries. Este fenómeno eventualmente destruirá el aislamiento.
Hay formas de proteger un motor. Además de un sistema de aislamiento reforzado, podría ser necesario insertar un filtro entre el convertidor de frecuencia y la inducción. Estos filtros están disponibles en la mayoría de los proveedores de convertidores de frecuencia conocidos.
Un filtro normalmente ralentizará el tiempo de subida de tensión de
dU/dT = 5000V/µs a 500-600V/µs
Falla de rodamientos
La avería de la maquinaria giratoria a menudo puede estar relacionada con la falla de rodamientos. Además del calentamiento excesivo, la lubricación insuficiente o la fatiga del metal, la corriente eléctrica a través de los rodamientos puede ser la causa detrás de muchas fallas misteriosas de los rodamientos, especialmente con inducciones grandes. Este fenómeno generalmente es causado por la falta de simetría en el circuito magnético, que induce un pequeño voltaje en la estructura del estator, o por una corriente de secuencia cero. Si el potencial entre la estructura del estator y la unidad del eje llega a ser lo suficientemente alto, se producirá una descarga a través del rodamiento. Las pequeñas descargas eléctricas entre los elementos rodantes y la pista de rodadura del rodamiento eventualmente dañarán el rodamiento.
El uso de convertidores de frecuencia aumentará la probabilidad de que se produzca este tipo de fallas en los rodamientos. La técnica de conmutación de un convertidor de frecuencia moderno provoca una corriente de secuencia cero que, en ciertas circunstancias, encuentra su camino a través de los rodamientos.
La forma más fácil de curar este problema es levantar un obstáculo para la corriente. El método habitual es utilizar un rodamiento con un revestimiento aislante en el anillo exterior.
Conclusiones
El uso de un convertidor de frecuencia no significa que esté libre de problemas. Muchas preguntas a las que hay que prestar atención durante el trabajo de diseño. ¿Será necesario, por ejemplo, limitar la potencia del eje disponible para evitar un calentamiento excesivo? Puede resultar necesario funcionar con una potencia de salida más baja para evitar este problema.
¿Resistirá el aislamiento del motor de inducción los efectos del inversor? ¿Es necesario filtrar? Los inversores modernos y eficientes tienen un impacto perjudicial en el aislamiento debido a la alta frecuencia de conmutación y el corto tiempo de subida de tensión.
¿Qué longitud máxima de cable se puede utilizar sin producir reflexión de voltaje completo? La amplitud del voltaje depende tanto de la longitud del cable como del tiempo de subida. Con tiempos de elevación muy cortos, se producirá una reflexión completa en cables de 10 a 20 metros de largo.
¿Podría ser necesario utilizar rodamientos aislados para evitar que una corriente de secuencia cero llegue a los rodamientos?
Solo cuando despejemos todas estas preguntas, podremos tomar decisiones correctas sobre el uso de un convertidor de frecuencia.